以ADAMS机械机构为基础的自动化设计和运动特性分析
2020-10-20黄太守
黄太守
摘 要:ADAMS是现代机械设计当中应用的重要软件,对于机械机构自动化设计以及运动特性分析具有非常重要的意义。本文笔者对ADAMS加机械结构软件进行了分析,并在文章中简要阐述ADAMS機械机构的自动化设计流程以及ADAMS结构运动特性分析。
关键词:ADAMS软件;自动化设计;运动特性
ADAMS是一种虚拟样机分析应用软件,在使用ADAMS软件进行机械设计的过程中,可以利用软件建立几何模型,并通过对几何模型进行参数分析,对建立的虚拟机械模型系统进行运动性能分析,从而保证机械自动化设计以及运动特性分析能够精准的完成。当前,在机械系统自动化设计以及机械机构设计当中,应用到ADAMS机械机构设计软件很大程度上提升了机械自动化设计的精度。
1 ADAMS机械机构软件的简要介绍
ADAMS机械机构软件是由美国机械动力公司研究的虚拟样机分析系统,是当前美国以至于全世界机械生产研发领域当中都在应用到的机械性能分析和设计软件,对于当前机械动力分析以及机械构造设计都有非常重要的意义。
2 利用ADAMS机械机构软件对自动化设计与运动特性进行分析
2.1 利用ADAMS机械机构软件完成机械自动化设计
在ADAMS机械机构软件使用中,其机械自动化设计功能是其非常重要的功能。在本文研究ADAMS机械机构软件设计功能时,以曲柄摇杆机结构设计为例进行了具体的试验分析,在其具体设计中,应该完成以下几方面设计工作:
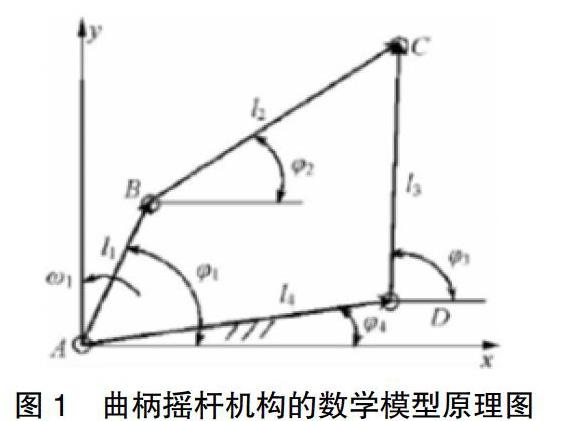
(1)数学参数模型设计。在利用ADAMS机械机构软件对曲柄摇杆机进行自动化设计试验中,首要完成的工作就是曲摇杆机数学模型的建立。在实际的应用过程中曲ADAMS机械机构软件利用相关设计要求参数,并利用自身的数学模型建立功能开始完成曲柄摇杆机的数学模型构件。以下图1是利用ADAMS机械机构软对曲柄摇杆机的数学模型坐标系设计,通过图1数学参数设计原理图可以发现,在实际的数学模型设计中,曲柄摇杆机构模型的构件位置角,都是属于逆时针角度设计。
(2)参数模型设计应用。参数模型设计也是利用ADAMS机械机构软件进行设计的重要模块。在具体的设计中,通过参数模块设计能够保证软件模型设计更加合理。在本文研究中,ADAMS机械机构软件对曲柄摇杆机构的参数模型设计内容具体包括以下几方面:
1)建立设计变量[1]。通过设计变量的设计能够保证设计更加合理。而在实际的曲柄摇杆结构参数模型变量设计中,主要包括长度变量设计、角度变量设计以及速度变量设计等三方面内容。a.长度变量设计分别为曲柄长度设计、连杆长度参数设计、摇杆长度参数设计以及机架长度变量设计等内容。其设计取值范围分别为0~600、0~1 200、0~1 500以及0~1 800。b.两个角度变量设计分别为曲柄位置角设计以及机架位置角设计,其设计取值范围分别为0~180、-900~90。c.一个变量角速度设计为曲柄转速,其中设计取值范围在0~360之间,实际设计中国初始值设计为30。
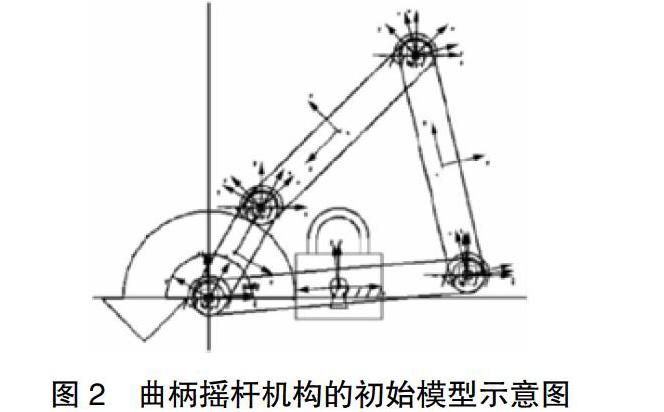
2)参数模型的设计。参数模型设计是ADAMS机械机构软件对曲柄摇杆机构进行设计的核心关键因素。通过参数模型设计可以最快速度和最精准完成模型和设计,在具体的设计中,利用ADAMS机械机构软件完成平面点设计,分别选取Point-A、Point-B、Point-C、Point-D作为四点构件模型。以下图2为ADAMS机械机构软件具体设计模型示意图。
2.2 利用ADAMS机械机构软件完成运动特性分析
在利用ADAMS机械机构软件设计的过程中,对曲柄摇杆机构的运动特性分析也是非常重要的组成部分,在其具体特性分析的过程中,主要包括以下几点分析内容:
(1)传动角运动特性分析。在曲柄摇杆机构具体设计应用的过程中,传动角运动直接影响到机械设备的具体使用效率,所以在应用到ADAMS机械机构软件进行具体分析的过程中,应该对传动角进行运动特性分析[2]。
(2)急回运动特性分析。在应用ADAMS机械机构软件进行曲柄摇杆机运动分析中,还应该包括急回运动特性分析[3]。急回运动特性分析中极限角度数据分析为关键分析内容,保证极限角度在55.7543°~99.5104°最为适宜。
3 结束语
本文笔者对基于ADAMS软件下的曲柄摇杆机构进行分析研究,试验中建立数学模型以及参数模型,并对曲柄摇杆机构的急回运动以及传动角运动特性进行分析。希望本文能够对ADAMS软件的具体应用有所帮助。
参考文献:
[1]王晓辉,胡志勇.基于ADAMS的链传动机构动力特性分析[J].机械工程与自动化,2018,000(004):77-78,80.
[2]秦利,李帅,李泳峄.基于Adams的梯形转向运动学分析与改进设计[J].机械制造与自动化,2018,047(006):127-129.
[3]孙慧.基于ADAMS的智能汽车自动化操纵稳定性研究与分析[J].自动化与仪器仪表,2019,000(002):19-21.
