高原森林防火航空器起降点布局规划方法
2020-10-20杨明明蔡中长
杨明明, 邵 荃, 高 健, 李 芳, 蔡中长
(南京航空航天大学民航学院,南京 210016)
近年来,全球范围内森林火灾的发生次数呈上升趋势. 世界范围内每年发生森林火灾在20万次左右,大约烧毁0.23%的森林面积. 森林火灾救援的不及时,可能对森林资源以及人民的生命财产安全造成极大的威胁. 而高原地区因其复杂的地形地貌以及特殊的气候环境,给森林防火扑火工作带来了更大的困难.以四川省凉山州的高原林区为例,2019年与2020年发生的两起森林大火分别造成了30名与19名扑火队员的牺牲. 如何对高原地区的森林火灾进行高效安全的灭火救援已经是不可忽视的重要问题,而建立合理的高原森林防火布局更显得尤为重要.
对于林火蔓延过程的模拟是森林防火布局规划中非常重要的一步. 张盛[1]、梁慧玲[2]、陈松等[3]对森林火灾的各影响因素进行了分析,明晰了与森林火灾发生发展有关的多重因素. 目前,利用元胞自动机(cellular automata,CA)模拟森林火灾已经是较为成熟的理论研究. 陈喆等[4]建立了三维元胞自动机各向异性林火蔓延快速模型. Sun T等[5]利用传统CA森林火灾模型对林火的表面火锋研究特性进行了进一步的探究. 谢绍锋等[6]通过离散化火场边界,利用CA动态模拟火场在时间维度上的蔓延趋势. 杨福龙等[7-8]建立了基于三维元胞自动机的林火蔓延三维模型. Zheng Z等[9]将ELM与CA相结合,有效描述了风速对火灾蔓延规律的影响. 周国雄等[10-11]通过对森林火灾的CA模型进行优化,提出了一种基于元胞自动机动态生成加权Voronoi图的重心模型和交替定位分配算法对森林灭火水源选址规划进行局部优化的方案.
在森林火灾的防火布局规划方面已存在较多研究,任亚平[12]运用混合启发式算法建立了对于较小规模的森林火灾的应急路径规划模型. 刘少海[13]提出了一种基于Dijkstra算法的森林防火勤务最优执行路径算法. 在扑灭森林火灾的各种救援方法中,航空应急救援因其快速、高效、受地形因素限制少等优点,成为目前最有效的方法. 朱燕[14]、王浩等[15]利用P-中心、P-中值模型确定了通用航空救援服务的网络布局. 胡栋栋[16]运用最短路径问题算法对机场应急消防站的选址布局进行了优化. 焦振田[17],刘丽峰等[18]对无人机在森林火灾中的路径规划优化方案.陈通[19]、夏正洪[20]等根据航空救援过程中不同目标点任务各自的特点,构建了一个解决灾后航空救援的问题可行性矩阵.
当前对于森林火灾防火布局规划的研究多对于路面交通进行,对于森林航空防火布局规划的研究较少;同时现有研究也都多未考虑高原林区特有的外界环境对林火发展的影响,缺少对于高原林区的适用性. 因此本文在利用CA模拟林火蔓延的基础上,利用P-中值模型以及层次分析法提出了一种森林防火航空器起降点布局规划方法,并以某高原地区为例进行了实验验证. 本研究的主要方法与流程如图1所示.

图1 主要研究内容流程Fig.1 Flow chart of main research content
1 布局规划方法流程与分析
该布局规划方法通过历年来的统计数据确定林区内火灾事故高发点的位置. 接着根据CA模拟在真实地理环境下森林火灾蔓延的实际状况,确定在该林区发生火灾的最佳救援时间,结合机型的飞行特性来确定该林区航空起降点的覆盖范围;同时结合地形等因素对该林区内适宜建造航空器起降点的位置进行预选址,再利用P-中值模型得到航空器起降点的终选址布局. 最后利用层次分析法对该林区的影响因素进行权重分析,给出选址点建设的重要度综合顺序,为合理高效的建立森林防火航空器起降点布局给出了指导性方案.
1.1 建立林火蔓延模型
由于森林火灾的蔓延受外界环境因素影响较大,在高原地区特殊的外界环境下更是如此,当地的植被类型、地形坡度以及风的影响都会对当前林区特有的林火蔓延情况产生影响. 因此采用元胞自动机结合林火蔓延公式来对高原森林火灾行为进行模拟,可以得到适用于高原林区的可视化林火蔓延状况.
元胞自动机的函数表达式如下所示:

式中:CA代表某个元胞自动机;N为不同元胞组成的网格空间;S为元胞目前所处的状态;NC代表元胞的邻域;R为规则.
在利用元胞自动机对森林火灾进行模拟时,设定N为二维正方形网格,每个元胞都代表一棵树的位置.因此,每个元胞节点包括3种状态:正在生长的树、正在燃烧的树和空白状态. 在每个时间步,元胞状态的更新规则如下:
1)如果正在生长中树附近的八个邻居中有一个为正在燃烧的状态,那么生长中的树会在下一个时刻变成正在燃烧中的树.
2)森林火灾发生时,最初被引燃的树的位置由历史统计数据位置来综合确定.
3)森林火灾的蔓延受风的影响. 风向对火灾蔓延的影响举例如图2.

图2 不同风向对火灾蔓延的影响Fig.2 Influence of different wind direction on fire
在jupyter中利用python语言进行实现,其流程如下所示:
Step1确定起火点的矩阵位置. 在卫星地图中确定作业林区图及各起火点的位置. 绘矩阵网格给出起火点及河流位置的矩阵坐标. 常见起火位置的确定应结合相关标准进行. 根据2009年1月1 实行的《森林防火条例》可知,我国对于森林火灾的分类标准主要依据受害森林面积、死亡人数及财产损失来确定. 以此为标准,我国对森林火灾的规模进行划分,可以划分为一般森林火灾,较大森林火灾,重大森林火灾以及特别重大森林火灾四类. 因此需要综合考虑火灾发生总次数以及较大及以上火灾的发生次数.
Step2林火蔓延速度设定. 采用毛贤敏[21]建立的修正王正非林火蔓延公式并结合当地林区的实际情况对林火速度(R)进行设定:

式中:R0为林火初始蔓延速度;KW为风更正系数;KS为可燃物配置格局更正系数,如表1所示;KF为地面坡度更正系数;V0为主风向上的风速;θ 为主风向顺时针旋转到指定方向的夹角;φ 为坡度角. 当地形是上坡地形时,A=0;下坡地形时,A=1. T为温度(℃),W为风力(级),a=0.053,b=0.048,c=0.275.

表1 各植被类型KS表Tab.1 KS value of each vegetation type
Step3迭代计算. 设置时间步长及总的时停,对燃烧过程中不同时刻的火灾蔓延情况进行可视化监测.
1.2 P-中值选址模型
1.2.1 P-中值模型 P-中值模型是在一个给定数量和位置的需求集合和一个候选服务点的集合下,使每个需求点都只能被一个服务点覆盖,从而使需求点与服务点的预选址位置之间的加权距离最小且不浪费服务点的选址建设,在保障在完成服务任务的前提下达到整体建设成本的最小化[22-23].
高原森林防火航空器起降点布局的P中值目标函数如下:

式中:Z为满足需求点要求情况下的整体距离;M为需要保障的m个需求点,M={1,2,…,m};N为n个航空器起降点的预选址位置,N={1,2,…,m}. dmax为第i个需求点与第j个预选址点之间的距离(km);yij为航空器起降点的位置j能否覆盖需求点i的判断指标,当可以覆盖时,yij取值为1,否则取0.
P中值问题的约束条件如下:

P为最终选取出来的将要进行建设的航空器起降点的个数(P<n). xj为航空器起降点的预选位置j 点是否被选为最终的建设点的指标,当j 点为最终的建设点之一时,xj的取值为1,否则取值为0. dmax代表需求点与服务点的预选址位置之间的最大距离(km). 通过目标函数(1)与约束条件(4)~(9)可以保证每个需求点都能被起降点覆盖,且只能被一个起降点覆盖,并且每个起降点都能得到利用.
1.2.2 贪婪取走启发式算法求解 根据贪婪取走启发式算法的规则来逐步求解最佳目标[24]. 首先,需要根据对应问题的约束条件来确定n个预选的服务点,再将符合预设条件的服务点指派给每一个需求点,计算出总的加权距离. 接着依次取走每个服务点,对加权距离进行计算,选择留下移除后总的加权距离最小的服务点组合. 重复上述步骤,直到下一次的服务点移除不能符合预设的目标条件为止,即为最终的需求点布局规划选择.
1.3 建立层次结构模型
对于高原森林消防航空器起降点的建设,不但要考虑到其特殊的地理环境对当地森林火灾的影响,还需要兼顾到当地的社会发展水平. 高原地区一般较平原地区地形崎岖,经济发展稍后,其地面道路交通水平较差,常用的道路消防救援速度可能较慢. 因此,基于对文献资料的研究,可以发现在高原森林防火航空器起降点的主要影响因素为:当地的火灾风险水平、地形因素、空域条件以及其他交通便利度四类. 由此可以建立高原森林消防航空器起降点层次模型,其层级结构如图3所示.

图3 选址因素的层次分析模型Fig.3 Analytic hierarchy model of influencing factors


表2 比例标度表Tab.2 Ratio-scale table


表3 RI取值Tab.3 The values of RI

2 实例分析
以某高原林区三月气象为例,对前1 节提出的布局规划方法进行可行性验证. 该林区日间平均气温15 ℃,西南风三级,主要植被为阔叶林与针叶林交织.
在进行护林任务时,本林区执勤飞机为K32型直升机,其飞行速度为200 km/h. 其最大载水量可达4 t,取水速度极快,只需要70 s便可吸满水箱. 每次飞行任务可携带2200 L航空煤油,可共计飞行3 h.
2.1 元胞自动机预选址
根据近十年林区常见起火点统计数据,选定火灾次数较多及后果较严重的六处位置点为需求点,分别标号为1、2、3、4、5、6. 接着利用元胞自动机模拟森林火灾的演化,通过网格矩阵定位将六个需求点的位置设为着火点,从而获得森林火灾在不同时间的燃烧状况. 以绿色表示林区中生长的树,黑色为燃烧后死亡的树,白色为林区内河流的位置. 如图4所示.
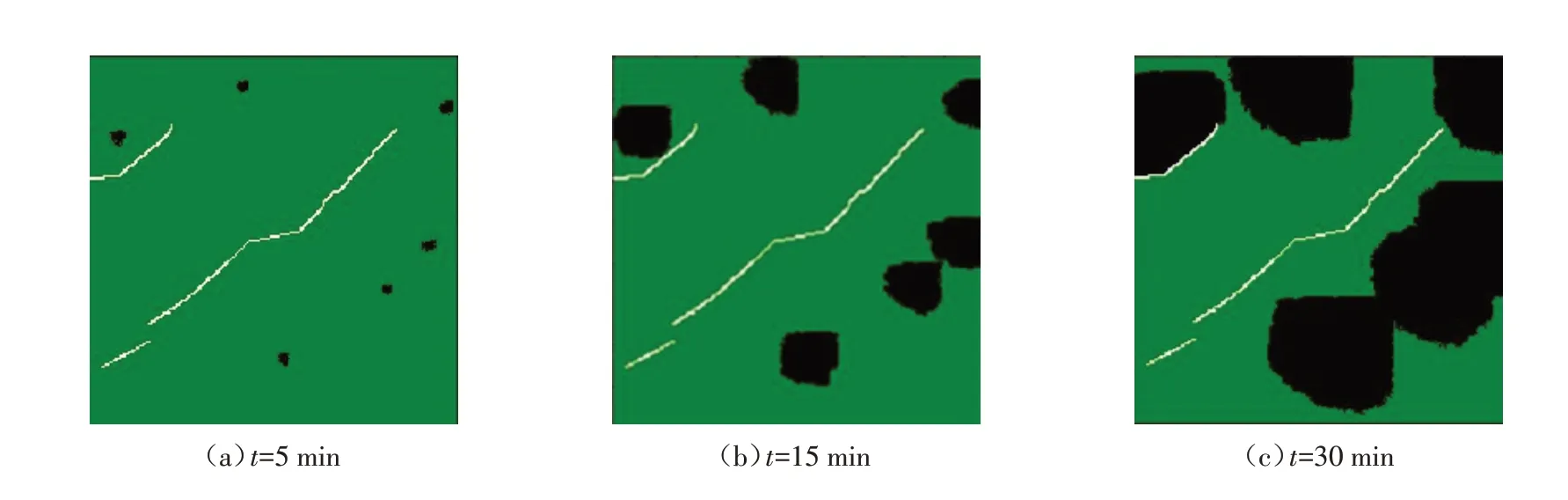
图4 CA模拟结果Fig.4 Simulation results from CA
可以看出,随着火灾的蔓延,最终将导致林区内全部树木燃烧死亡. 30 min内是最佳救援时间,超过30 min后火势逐渐凶猛,不利于进行航空消防救援作业. 结合直升机的飞行速度可知,航空器起降点的最大覆盖半径应为100 km. 同时根据地形特征,初步选取了11 个较为合适的地区为直升机起降点的预选址点,记为A-K. 需求点和预选址点的位置如图5 所示,其中蓝色点为需求点,红色点为预选址点.
2.2 P-中值模型终选址
各需求点与预选址点之间的直线距离由测距工具获取,如统计表4所示.

图5 需求点与预选址点示意图Fig.5 Schematic diagram of demand points and airport pre-selection sites

表4 各需求点与预选址点间距离Tab.4 The distances of demand point and airport pre-selection site 单位:km
将需求点与预选址点的距离作为衡量标准,仅记录在有效航程(100 km)内的需求点与预选址点的距离. 其中空格代表两点之间的直线距离大于100 km. 由于航空器起降点最终布局规划的具体数量未知,因此本次计算结果将利用贪婪取走算法迭代计算至所有的需求点与预选址点的距离最小,即整个航线的长度最短为止. 当迭代计算至K=5时,相关数据如表5所示.

表5 K=5时需求点至预选址点距离Tab.5 The distance of demand point and airport pre-selection site when K=5 单位:km
指派方案为:1-C,2-E,3-F,4-G,5-G,6-I,总距离为96.31 km. 若继续对预选址点进行移除计算,将无法保证在最开始所设定的约束条件,即无法保证每个需求点都能距离最近服务点100 km内. 因此可以得出最终的预选址布局为:C、E、F、G、I五个点. 选址点分布如图6所示.
2.3 层次分析法确定建设顺序
通过查阅本林区历史资料与地理资料获得本林区内的主要四个影响因素,根据研究可以得到各因素评估标准. 事故风险发生水平要根据森林火灾后果严重度来进行评估,其评级标准依据森林火灾分级标准进行评估,另外三个影响因素评级标准如表6~8. 通过德尔菲法确定准则层各因素之间的权重,最终可以得到层次总排序,如表9~10所示.
对每个判断矩阵及矩阵组合进行一致性检验,组合矩阵的CR=0.04<0.1,各个判断矩阵也均满足CR<0.1,故本选址组合通过一致性检验. 同时根据权值总排序,在建设该林区的森林防火航空器起降点时,各点建设的优先顺序为:G、I、F、E、C.

图6 最终选址图Tab.6 Schematic diagram of the final airport sites

表6 地形因素评估标准Tab.6 Terrain factor evaluation criteria

表7 空域条件水平评估标准Tab.7 Assessment criteria of airspace condition level

表8 其他交通便利度评估标准Tab.8 Other traffic convenience evaluation standards

表9 准则层排序Tab.9 Criteria sorting table

表10 方案层排序Tab.10 Scheme sorting table
2.4 效用分析
以优先建设点G为例对增设起降点后的森林火灾情况进行计算. 假设需求点3发生森林火灾,K-32型直升机从原航站出发前往火灾区域灭火,由地图测距工具可以发现最近的河流水源位置位于火灾位置30 km处,原航站距林火位置为158.91 km,起降点G距离林火位置71.58 km. 直升机的灭火面积随着其回原航站与去起降点返航补充油料的次数变化如表11所示.
可以发现,在首次返航补油前,建设起降点G后的灭火面积已经是之前的1.4倍. 随着灭火时间及返航补油次数的增加,总灭火面积的倍数值也逐渐变大,可以发现,在已建设起降点G的情况下,第二次返航补油时的总灭火面积已达到无起降点G时第三次返航补充油料的总灭火面积. 即在灭火总面积均为24 000 m2时,时间差异在3 h,显然这个差值会随着灭火工作的进程逐步累加,若未建设G,将会导致更大的损失.

表11 起降点G建设前后灭火效果对比Tab.11 Comparison of fire fighting effect before and after construction of take-off and landing point G
3 结论
本文提出了一种适用于高原森林防火的航空器起降点布局规划方法. 通过对作业林区历史统计数据进行分析并利用元胞自动机对森林火灾的蔓延过程模拟,可以有针对性地对作业林区的需求点以及人工预选址点进行科学选择. 接着利用P-中值模型对预选布局进行最优组合求解,确定航空器起降点布局的终选址. 最后对起降点位置的各影响因素进行分析,利用层次分析法计算每个选址点的权重,从而来确定各个选址位置的建设顺序. 最后,以某高原林区为例,对上述布局规划方法进行了可行性验证.
现提出的方法可以对高原森林防火航空器起降点进行合理的布局规划,既满足了森林防火的需求又在最大程度上避免了由于有效范围的重复覆盖而造成的资源浪费. 同时还根据权值计算给出了整个布局规划过程中选址点的建设顺序,在实际应用中具有很强的可操作性和意义.