多媒体武术系统在智能采摘机器人中的应用
2020-10-19张军平
张军平
(湖北工业大学 体育学院,武汉 430068)
0 引言
智能远程协同技术实现的基础是采用计算机、信息自动化和现代化管理技术最先进的研究成果。 当前,多数采摘机器人协同交互的方式是以 CAD系统为主、仅支持单个人机交互系统。CAD系统以交互式图形控制系统和工程分析计算为主, 其协同交互系统简单、应用狭窄,不能满足现在信息快速发展的要求。因此,开发远程协同设计控制系统平台势在必行。
随着现代科技控制技术的快速发展,智能机器人在许多领域中被采用。在农业生产中,机器人的智能化水平越来越高,适应日益复杂工作环境的采摘机器人应运而生。机器人的采摘过程要求必须能够避开障碍物并达到采摘目标,且不会损坏果实。 协同技术控制生产的采摘机械手的精度高,工作性能好,生产出来的采摘机械手避障效果好, 具有最少自由度和最佳的工作空间,能够快速地完成采摘。 机器人手臂和智能拣选机器人的末端执行器的精度越高,动作越灵活,执行采摘操作的动作也越来越平滑,加快了采摘效率、增加了余量、消除了故障点且提高了解决方案的稳健性,为机器人设计中遇到的问题提供了更多的解决方案。协同技术的研究可以使机器人的功能结构更加丰富, 应用的范围更广。随着协同技术的发展,远程多媒体控制系统被用于提高机械的制造水平中来。 本文基于多媒体武术教学系统的智能采摘机器人协同技术,研究开发主要侧重在采摘机器人的生产制造方面和智能化控制方面,以实现采摘机器人生产的智能化及遥控操作,提高了采摘机器人的生产水平及种植效益。
1 多媒体武术教学系统及其机械数字化设计中的应用
武术在学习中尤其重要的是动作的规范,讲究的是标准动作。在学习过程中,学员首先需要知道武术动作的套路、 动作路线及动作的规范,做到动作标准无误。 武术目的在于健身、防身和攻击等,为了达到期望及效果, 武术动作在发出时需要有力,要求学员在跟随多媒体武术教学系统(见图1)学习时动作要标准规范, 用力方向一致。采用多媒体教学系统学习可以不限时间、不限地点,还可以将教学视频回放,在现实教学中为学员提供了更为便利的学习机会。
图1 远程多媒体武术教学示范Fig.1 Remote multimedia martial arts teaching demonstration
远远程多媒体武术教学系统可以让学员重复学习武术动作,教会学员规范的武术动作,将这种模式应用在智能采摘机器人的制造和使用上,可以使设计更加智能化。远程数字化指导生产制造如图2所示。研究者通过远程数字化指导可以实现采摘机器人的协同研发,控制采摘机器人制造过程中的质量,提高制造采摘机器人的设计水平。由许多资料数据和实际的生产现场发现:采用数字化设计,机械的研发周期可缩短30%~50%,不合格品出现的几率也极大降低。例如,在采摘机器人生产的 FDM技术中,在远程计算机的控制下加热材料,用数字化控制手段控制喷头根据事先设置的范围进行喷涂,形成机械零件的外壳,根据实际要求计算需要喷涂层数,循环喷涂后形成的产品是采摘机器人的生产的模型。该模型可用于试验提取数据,也是采摘机器人机械零件投入生产的模具的最初形态,将模型经过调整改进后即可得到可用于生产的模具。
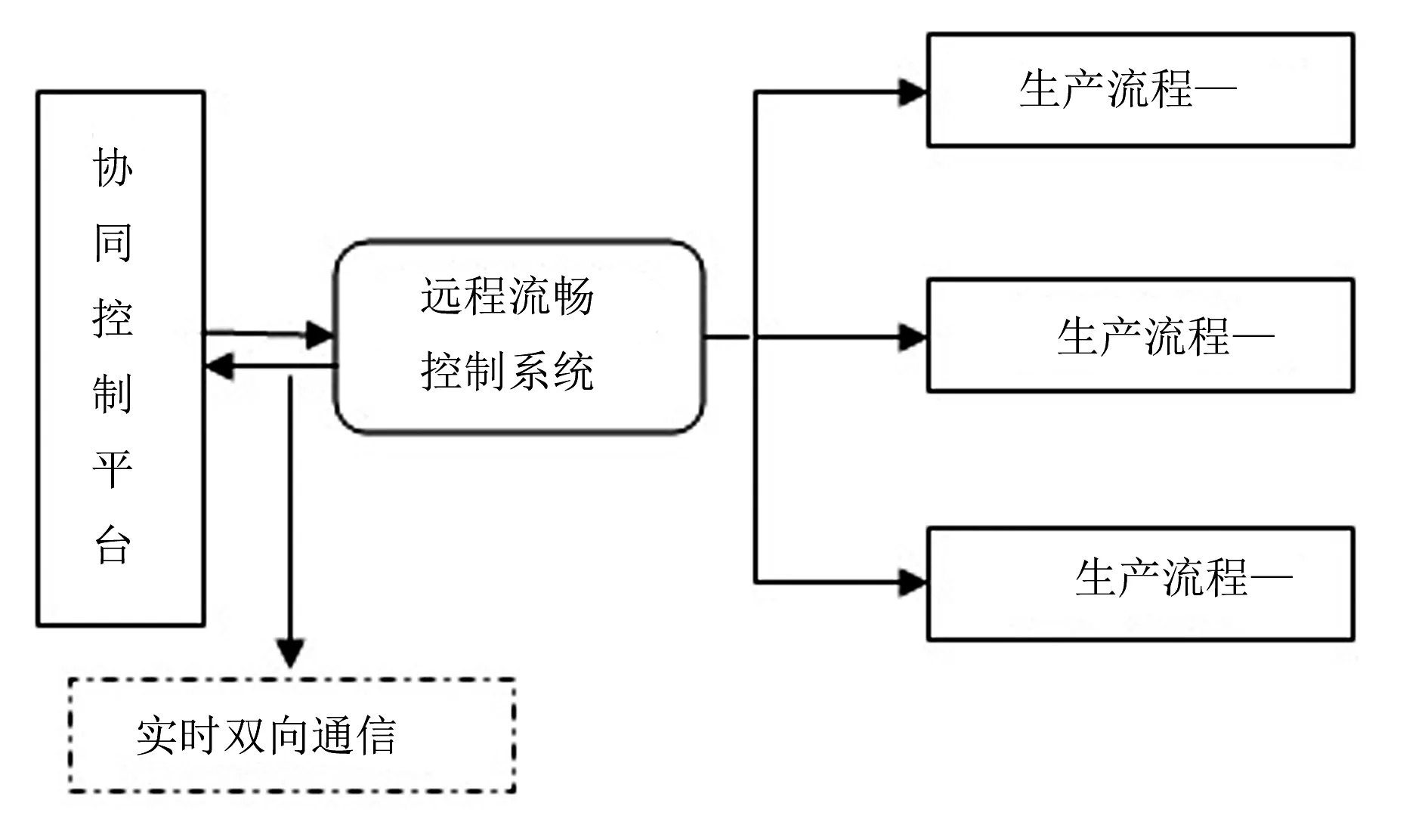
图2 远程数字化生产指导Fig.2 Remote digital production guidance
采用远程数字化的指导和远程会议的形式,可以在生产研发的同时实现产品的展示,让人直观观察模型是否满足要求, 在还未达到要求时,可以通过远程数据修改设计参数。 远程数字控制可以实现机械零件的快速设计和生产, 因不需要人员直接接触,不会对人产生危害,该技术对环境的污染减少,让员工有个安全的工作环境。FDM技术所采用的原料简单且为丝状,运输更为方便,且可以制造形状结构复杂,可快速制造难以成型的机械部件。使用FDM技术生产机械零件的工艺流程少,生产操作简单,减少了生产过程中的原料损耗,节约生产成本。 FDM技术采用远程数字化控制的方法进行操作,如采用简单的WEB浏览器,可远程进行CAD设计。
远程数字化控制在采摘机器人的作业环节,可通过远程数字化控制采摘作业、采摘机器人的移动、机械臂的活动和末端执行器的移动, 根据传感器的采集的数据信息、协同服务平台系统和数据库数据,收集机器人的行走路径,实现采摘机器人的自主导航和定位水果,完成采摘操作。智能拣选机器人操作如图3所示。
2 采摘机器人智能远程数字化设计服务系统
智能数字化用于采摘机器人研究设计中,可以明显缩短机械设计研发周期,降低生产中出现不合格品的概率,实现资源共享。本文研究的采摘机器人远程智能数字化设计系统主要阐述两个方面:一方面是基于FDM技术的制造,另一方面是采用美国ANSYS开发的有限元分析软件的远程设计系统。
2.1 基于WEB和FDM的远程协同数字化控制系统
基于WEB和FDM的远程系统数字控制系统由4个主要部分组成,即设计图纸和数据管理、流程管理、任务管理和数据库。其以功能性强、使用限制不高的CAD软件进行设计,浏览展示采用 WEB浏览器及三维可视化等技术,开发了一种用于远程协同控制的集成系统。根据所需的功能要求,远程数字协同控制制造系统功能包括工程管理、零件管理、可视化管理、过程管理和图纸管理。远程协同控制系统的框架如图4所示。
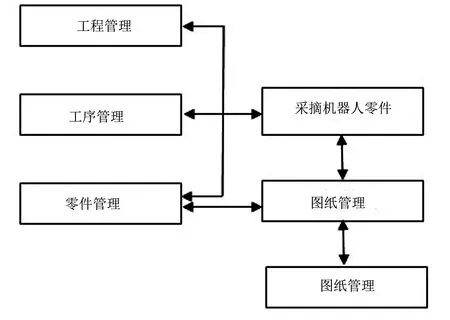
图4 远程协同控制系统框架Fig.4 Remote collaborative control system framework
远程协同控制制造系统是围绕采摘机器人设计进行的,根据人们的习惯,在计算机桌面上创建WEB远程浏览器和FDM制造系统功能图标,并进行各个功能模块的关系的建立。
2.2 基于有限元分析软件的远程设计辅助系统
采用ANSYS开发的有限元分析软件对机械零件进行设计并对设计品校核。根据弹力运动学采用有限元分析,创建n个有限单元的方程为
[Ln]{In}={Gn}
(1)
其中,{I}、{G}为有限元单元的节点位移矢量和节点力;[L]为矩阵;n为有限单元体的序号。根据分割时节点间的关系,节点力、节点位移和矩阵编号为
[LnaaLnbb]{Inb} = {Gna}
(2)
[LnbaLnab]{Ina} = {Gnb}
(3)
其中,上标为a、b节点分类编号,改写为
{Gna}= [Lnaa]{Ina}+[Lnab]{Inb}
(4)
{Gnb}= [Lnba]{Inba}+[Lnbb]{Inb}
(5)
消除其中的{Ina},由式(5)得
{Ina}=[Lnaa]-{Gna}-[Lnaa]-[Lnab]{Inb}
(6)
代入得
{ [Lnbb]-[Lnaa]-1[Lnba] }{Inb}={Gnb}-
[Lnba] [Lnaa]-1{Gna}
(7)
即
[Lnm] = [Lnbb]- [Lnaa]-1[Lnab]
(8)
[Gno] = {Gnb}- [Lnba] [Lnaa]-1{Gna}
(9)
循环上面的步骤得
[Lnm]{Inb}={Gno}
(10)
[Lxaa]{Ixa}={Gxa}
(11)
{Gxa}为已知,则有限单元体的位移即式中{Ixa}求得,同理可求出{Ixb},代入得
(12)
3 基于远程辅助数字化设计与快速制造
机械臂为采摘机器人的重要部件,精度的要求高且需灵活,在设计和制造上更具难度, 研发设计的周期长,出现不合格品的概率较其他零件高,因此在设计时还应进行精度校核。 精度校核可采用试验的方法和仿真模拟数值的方法。采用仿真模拟数值的方法可以对机械臂的尺寸动态拟合进行校核,模拟多自由度机械手的操作,并使用远程协同设计和检查,最后得到达械手的模型。
模型在校核完成后,得到的数据就可采用FDM技术快速制造。试验表明:采用远程数字化设计系统研发采摘机器人零件有效的缩短了研发周期,与传统的生产工艺相比,降低了不合格产品的发生概率。
4 结论
基于多媒体武术教学系统原理,进行了智能采摘机器人远程协同数字化服务系统设计,提高了采摘机器人生产的设计和制造水平、机械部件的灵活性及工作定位的准确性。
采用远程数字化设计制造采摘机器人,有效地提高了设计效率,缩短了研发周期,提高了企业的生产制造水平,实现了机械零件的快速设计与生产。
