基于双天线GNSS的精准平地控制系统试验研究
2020-10-19梁冉冉庄卫东
梁冉冉,庄卫东
(黑龙江八一农垦大学 工程学院,黑龙江 大庆 163319)
0 引言
随着农业的快速发展,对水资源的需求量不断增大,农田灌溉用水比例已经达到农业用水量的90%以上。由于农田地表不平,超过20%的农田灌溉用水流失,造成土壤和养分的流失。平地机的发明为解决提高土壤均匀性和降低水肥流失等问题提供了方法。土地平整技术在土地开发管理和农业节水灌溉中都起到至关重要的作用,它可通过平地机的工作将高低不平的土地平整到完全水平或带有一定的坡度的状态。土地平整主要分为基本土地平整和精细土地平整两类,基本土地平整主要是对土地进行粗略平整,包括铲运设备、推土设备和刮土设备。基本土地平整质量主要受设备因素和人为因素影响,导致土地平整水平整水平精度受到限制,而精细平整设备的出现弥补了基本平整设备的不足,其主要包括激光控制平地设备和GNSS控制平地设备[1]。
激光控制平地设备由平地铲、控制器、液压系统、激光发射器和激光接收器等组成。激光平地设备和传统平地设备相比时优越性十分显著,前者灵敏度和精确度是后者的10~50倍。经过激光平地机平整后,肥料的利用率达到50%~70%,比基本平整后平均增加10%,农田平整范围为3cm,农田利用率提高2.6%,农业经营成本较低15%,节水20%[2]。激光平地机本身也存在一些不足:作业半径不足500m,接收器垂直感应距离范围仅为20~30cm;工作环境要求高,在大风、暴雨天气情况中,由于激光信号受到限制,无法正常工作;智能化程度低,不能实现农田地形测量和路径的规划[3]。
GNSS控制平地设备对于激光控制平地设备中的问题给与了有效的解决,主要优点有:可全天候24h作业且不受恶劣天气影响;在作业面积上不受限制,适合大规模作业;集成水平高,安装容易;作业高度调节范围大;智能化和可视化水平高,可以进行路径规划和地形测量,极大地提高土地平整作业效率[4]。
传统的GNSS平地机主要是通过控制单个液压油缸的伸缩控制平地铲的升降,在一些坡度较大的土地上工作时不能保持平地铲的水平状态,导致了平地效果不理想[5]。
针对平地铲不能保持一直水平的难题,本文开发了一款由双油缸控制的双天线平地机控制系统。系统的主要优点在于平地铲的水平状态可以通过调节两个油缸的伸缩、平地铲的俯仰角、水平倾角保证;操控方便,运用灵活,灵敏度的可视化程度高,极大地提高了土地平整精度。
1 整体结构和工作原理
1.1 整体结构
平地机整体如图1所示。
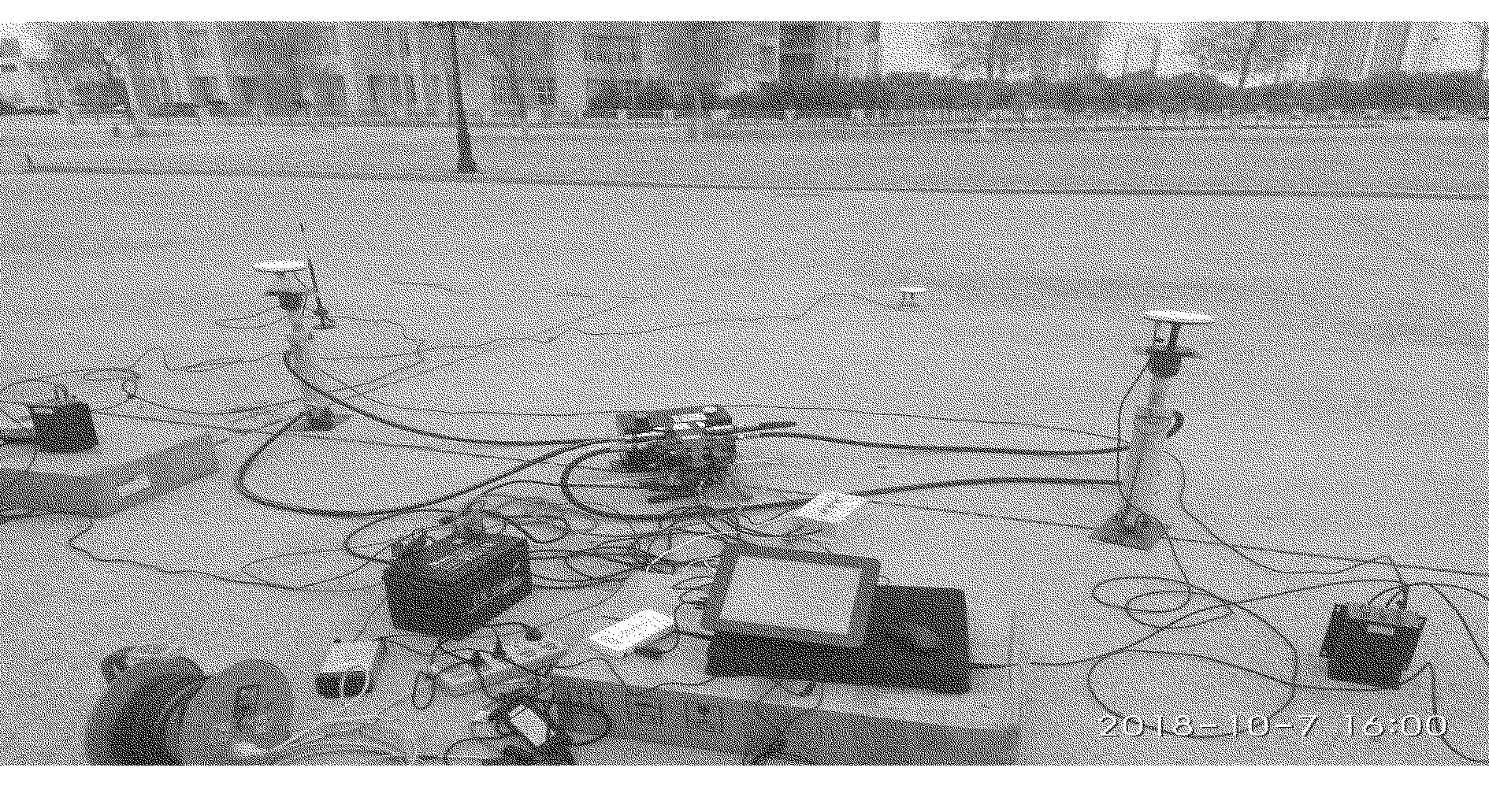
图1 双天线GNSS的精准控制系统整体结构图Fig.1 Overall structure diagram of GNSS precision control system for dual antennas
1.2 工作原理
GNSS基准站发射RTK差分信号,GNSS移动站接收液压油缸的经度、纬度、高程、航向、俯仰角、方位角、速度、接收到的卫星数和卫星信号等信息[6]。当软件开启60s后,接收到的位置信息变化保持在厘米级,卫星信号为差分状态时,软件运行平稳;四路控制器选择自动状态,利用软件自动控制液压油缸的升降,液压系统为单独控制两个液压油缸的升降提供动力。由于将两个液压油缸放置在水平面上,液压油缸的升降不明显,基于此问题利用程序将液压油缸的高程设置为周期66s、高程变化范围为10cm的正弦曲线来模拟实际土地高程变化,并检测两个液压油缸的高程是否和设置高程的高度差保持在2cm、俯仰角的变化范围保持在2°之内。工作结束后,软件自动将数据存储到数据库中[7]。
2 参数及主要部件设计
2.1 试验台的主要技术参数
液压油缸外形尺寸/mm:630×250×2 500
工作幅宽/mm:3 000
油缸伸缩量/mm:0~300
电磁换向阀型号:DSG-02-306-DC12V-20
工作电压/V:220
工作温度/℃:0~40
传动方式:液压传动
2.2 主要部件设计
2.2.1 四路控制器
四路控制器是试验台的核心控制部件,可以选择手动调试和自动调试两种控制模式。当选择手动调试时,可以单独控制两个液压油缸的升降,快速查找出液压油缸和电磁换向阀在工作中的不足,方便调节[8];当选择自动调试时,启用精准平地控制软件,实现根据土地实际高程变化自动调控液压油缸升降以达到精准平地的目的。四路控制器的主要优点为操作简单、人机互动性高,是连接电磁换向阀和精准平地系统软件的中枢。
2.2.2 精准平地控制系统软件
精准平地控制系统软件是双天线GNSS的精准平地系统中的关键技术,主要包括GNSS调试、控制调试、平地作业及记录图4部分[9]。GNSS调试主要功能为接收GPS 信号,确定平地机的经度、纬度、速度、高程、作业时间、航向角、俯仰角、接收到的卫星数量及卫星信号质量等信息。控制调试的主要功能是在未连接卫星信号时通过系统单独控制液压油缸的升降,当接入卫星信号后,系统可以通过红绿灯的亮灭来分别显示左右液压油缸的升降[10]。平地作业主要功能为:当系统获取土地的当前高度后,自动调节两个液压油缸的升降,以达到精准平地的目的。记录图的主要功能为测量工作地块的高程图,记录平地机的作业轨迹,显示平地机作业前后土壤高程的变化程度。
2.2.3 液压传动系统
根据精准平地系统的工作要求,设计了如图2所示的液压工作系统。
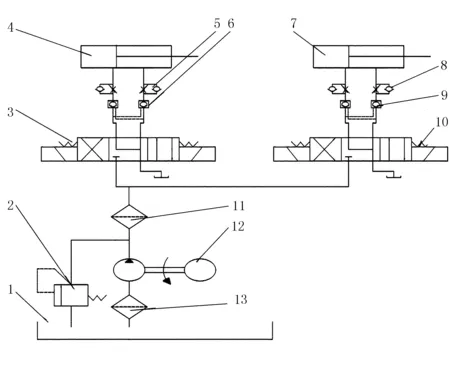
1.油箱 2.节流阀 3.左三位四通电磁换向阀 4.左侧液压油缸 5.左单向节流阀 6.左液压锁 7.右三位四通电磁换向阀 8.右侧液压油缸 9.右单向节流阀 10.右液压锁 11.精滤油器 12.液压马达 13.粗过滤器图2 液压传动系统工作原理图Fig.2 Working schematic diagram of hydraulic transmission system
该系统可以帮助平地机在工作中实现9种不同情况的调节。液压系统开始工作时,液压马达通过过滤器将液压油输送到两个三位四通电磁换向阀的阀体内,软件根据双天线定位系统得到液压油缸两端的高度和俯仰角的角度,自动判断液压油缸的伸缩。如果液压油缸需要上升,电磁换向阀左侧的电磁铁通电,液压油缸伸长;如果液压油缸需要下降,电磁换向阀右侧的电磁铁通电,液压油缸缩短;如果液压油缸需要保持静止,电磁换向阀处于中位状态,液压油缸长度不变。左右液压油缸单独具备上述3种运动状态,经过组合共有9种不同的运动情况可实现单独调节,满足平地过程中不同的土地状态[11]。液压锁和单向节流阀为液压油缸提供稳定的液压动力,保证平地机作业时的稳定性。
3 平地模拟试验
3.1 试验条件
2018年10月7日于黑龙江八一农垦大学校园内进行了双天线GNSS的精准平地模拟试验。试验中,采用司南定位系统发射和接收卫星信号,车载电脑为控制系统,液压系统为动力输出系统。测试试验台在精准平地软件将土地当前高程设置为正弦曲线变化时,两个液压油缸自动调节水平高度的精度和俯仰角的变化范围。
3.2 试验方案
连接GNSS基准站、移动站及精准平地系统软件,将液压控制系统和四路控制器相连接,再将平地系统软件打开,接收卫星信号,开启液压控制系统。通过四路控制器选择手动或自动调控液压油缸的升降,通过手动控制将液压油缸分别调节到合适高度[12]。选择自动控制,设置当前土地高程,点击设置高程按钮,液压油缸通过上升和下降来调节水平;在软件开始运行60s后,卫星数和卫星信号保持稳定,开始试验。
3.2.1 液压油缸伸缩量的计算公式
精准平地软件通过单独调节液压油缸的升降来保障平地机的平衡。设参数dol为GNSS接收器处偏离设定高程的距离,则有
dol=|d-dnαv|
式中d—GNSS接收器处的高程;
dnav—设定高程;
dol—接收器处偏离设定高程的距离。
当dol=0时,不进行高程调整。当dol≠0时,若d-dnav>0,则GNSS接收器在设定高程下方;若d-dnav<0,则GNSS接收器在设定高程上方。
3.2.2 司南方位角报文解析及俯仰角计算公式
在司南系统中,方位角信息主要有XXTRA语句提供[13]。XXTRA语句的格式为:$XXTRAhhmss.ss,hhh.hh,ppp.pp,rrr.rr,q,n,dd,dd,xxxx*CC
式中Φ—A、B两点之间的俯仰角;
x1—B点的横坐标;
y1—B点的纵坐标;
z1—B点的竖坐标。
通过精准平地试验台的测试试验,并确立平地机的自动控制精度与模拟土地高程之间的关系,检测俯仰角在两个液压油缸在伸缩过程中的变化,测试平地机的工作精度是否随着土地模拟高程的变化而变化,俯仰角的变化是否始终在精度范围内。本系统设计的精准平地系统的平地精度为2cm,俯仰角的变化精度为2°。
3.3 试验方法
首先连接GNSS基准站、移动站及精准平地系统软件,将液压控制系统和四路控制器相连接;然后,将平地系统软件打开,接收卫星信号,开启液压控制系统,通过四路控制器选择手动或自动模式单独调控两个液压油缸的升降。通过手动控制,将液压油缸分别调节到合适高度,选择自动控制,设置当前土地高程,点击模拟土地高程按钮,液压油缸通过上升和下降自动调节水平;在软件开始运行60s后,卫星数和卫星信号保持稳定,开始试验[14]。将平地模拟试验中高度变化设置为80.07~80.17m,每2s钟高程变化为0.003m,模拟高程的变化为正弦函数,每66s完成一次高程变化周期;在GPS信号接收平稳后,点击平地模拟试验按钮,开始试验。以200s为每组数据测试时间,分别测试2组试验,对平地作业的实际高程和俯仰角数据进行收集,并对试验数据进行数据处理分析[15]。
3.3.1 确定设置高程和高程之间的关系
对于采集到的设置高程和高程数据利用Excel进行数据分析,利用图形构建器做设置高程和高程折线图,观察设置高程和高程数据之间的变化关系,如图3所示。做残差分析图,分析设置高程和高程之间的误差关系,如图4所示。

图3 设置高程和高程变化曲线图Fig.3 Set elevation and elevation change Graphs
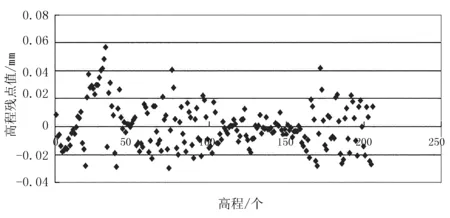
图4 高程残差散点图Fig.4 Elevation residuals scatter plot
3.3.2 确定实际俯仰角和标准俯仰角之间的关系
对于采集到的设置高程和高程数据利用Excel进行数据分析,利用图形构建器做实际俯仰角和标准俯仰角折线图,观察数据之间的变化关系,如图5所示。做残差分析图,分析实际俯仰角和标准俯仰角之间的误差关系,如图6所示。
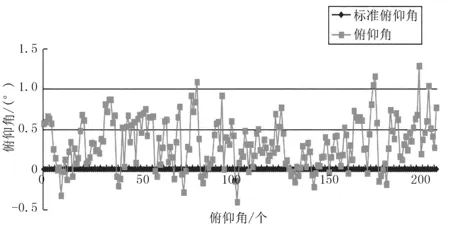
图5 标准俯仰角和俯仰角变化曲线Fig5 Standard pitch angle and pitch angle variation curve
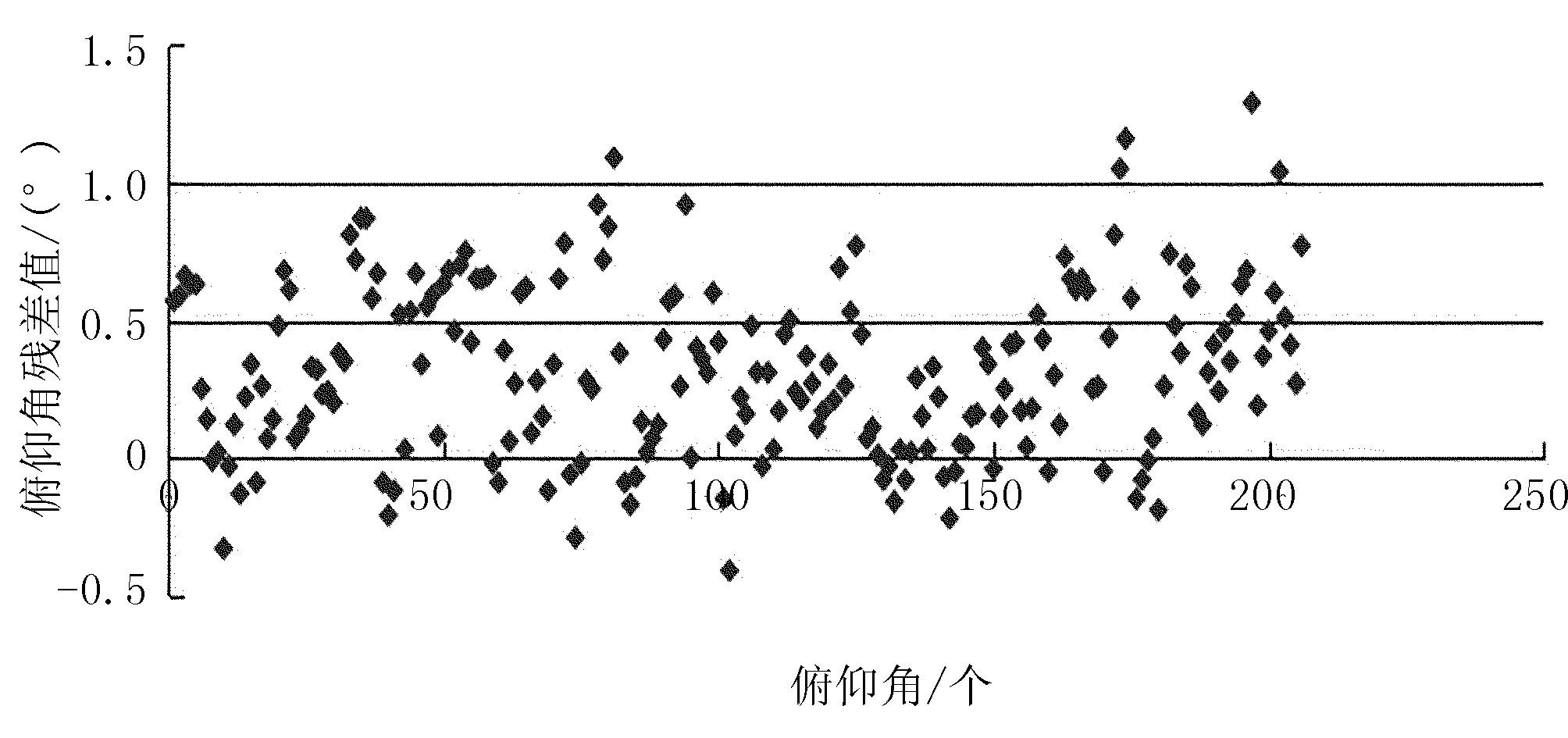
图6 俯仰角残差散点图Fig6 Pitch angle Residuals scatter plot
从试验数据分析结果可以看出:土壤设置高程和平地机的工作高程之间的残差值小于3%,平地精度控制在2cm之内;俯仰角和标准俯仰角之间的残差值小于3%,变化精度小于2°,符合平地机作业精度。
4 结论
设计了一款符合国家农业机械施肥标准的基于双天线北斗定位系统的精准平地系统,可以绘制不同地块的地形图,根据卫星信号的反馈通过调节平地机两端液压油缸的伸缩,以确保平地机的水平。对该系统进行了室外测试试验,结果表明:平地精度控制在2cm内,俯仰角变化范围小于2°,可以满足精准平地的要求。本文研发的基于双天线北斗定位系统的精准平地系统具有技术先进、可靠性高、方便操作及平地精度高等优点,满足工作要求。
