基于视觉技术的芒果运输过程监控系统设计
2020-10-19黄毅英
黄毅英
(广西经贸职业技术学院 信息工程系,南宁 530021)
0 引言
与工业品运输相比,农资运输的时效性更强,对运输环境的要求更苛刻,有效监控运输车辆对农资企业来说尤为重要[1]。芒果是一种易变质的水果,对其进行运输监控更是农资运输规划的重点。运输监控主要是对三维物体建立适合计算机表示和处理的数学模型,在计算机视觉环境下对三维物体实施处理、操作和分析物体性质,也是在计算机中建立表达客观世界的虚拟现实技术。
有学者设计了一种肉类食品运输车环境监控系统,实时监控肉类状态,并对肉类质量进行预警。经过实验发现,该系统可有效防止肉类在运输过程中的变质现象,但系统成本高,不适合大范围推广[2]。有学者为了确保货物的运输工作与安全,设计了基于物联网技术的特种货物运输监控系统。实验表明,该系统具有精度高、低成本等优点,但对技术要求过高[3]。有学者设计了一种原料奶运输过程的实时监控系统,利用多种网络手段[4],对原料奶加工与运输过程的数据进行实时采集与储存,实验证明该系统可以确保原料奶在加工运输过程中的质量与安全,但数据繁冗,容易造成系统卡顿及数据丢失。
为解决以上问题,提出了基于计算机视觉技术的芒果运输图像监控系统设计方法,旨在提高芒果运输图像监控的准确率与效率。
1 芒果运输监控系统
1.1 运输监控系统框架设计
运输照明模块和运输选通成像模块构成芒果运输监控系统[5]。运输照明模块的主动光源利用脉冲型激光器提供,主动照明在使用扩束镜扩充后将照明供应给目标;运输选通电源外部触发信息用经光电检测器转换的光信号来表示[6],ICCD工作状态在时序上使用选通电源完成准确处理,运输距离选通成像功能通过上述两个模块的共同完成[7]。芒果运输监控系统框架如图1所示。

图1 运输监控系统框架图Fig.1 Transport monitoring system framework
1.1.1 芒果运输监控系统照明模块
芒果运输监控系统照明模块中的“脉冲激光源”与“接收距离门”的结合可抑制后向散射光[8-9],散射的缺点可通过激光器消减,进而提高图像监控清晰度和测量距离[10]。
1.1.2 运输监控成像模块
芒果运输监控系统里的重点组件为运输选通成像模块,包括选通成像增强仪、控制电源、光电测量仪、相机和镜头[11]。镜头聚焦后外部激光脉冲辐射转向选通成像增强仪的阴极,光信号的转换通过选通成像增强仪来完成;中继透镜实现光信号聚集到相机的CCD光敏面,完成运输三维目标的成像。
1.2 运输监控系统模型
设置脉冲周期和脉宽分别为Ok和OG,相机增益和总和增益分别为α和2α2,o为脉冲周期最高值,λ为脉冲周期最低值,脉宽峰值在0~λ处,典型的高斯分布公式为
(1)
其中,信号单脉冲能量为Q0。当参考脉冲下降到1/v时设置脉宽和脉冲周期分别为OG和Ok。
OG在运输监控系统里通常要大于Ok。分析1个脉冲周期OG的照明和反应,若选通成像和脉冲照射同样是具有L个不透明目标的现场,r0到rj是距离分布,O为选通成像的开放门宽时间,运输选通门宽函数公式为
(2)
其中,△r=O·p为门宽时间相对的选通层成像距离;p为光速。
1.3 质心算法求解运输过程距离信息
传统二值化算法在运输选通门较宽较大时求解距离精度差,此时距离数据使用质心算法运算最佳。运算各个运输图像像素相对的间隔信息为质心算法和传统二值化算法的主要区别,使用质心算法的运输图像成像效果最好。选通成像时目标有一定几率产生在多个切片图像里,选通距离变化决定成像目标的灰度值变化,目标真实距离只有在理想环境、运输选通距离统一或相仿时,探测器才能获取所有运输目标反射回波,此时相对的目标灰度值也最高。因此,质心算法假定各个像素的精准间距对应其一系列切片图像里最高的灰度值。运算步骤如下:
1) 运算全部运输图像的相对延时与间距信息。若利用延迟时间采集1~a幅切片图像,那么按照质心算法推算,ux=u0+xΔu为第x幅图像Xx(a,b)的相对延时,相对间距信息Zx为
(3)
2)运算运输图像各个像素(a,b)的相对延时,求全部图像的灰度值之和,公式为
(4)
像素(a,b)的相对延时为
(5)
相对运输距离信息为
(6)
1.4 基于计算机视觉技术的运输监控三维成像
质心算法求解运输距离信息过程中通过质心法原理判断,要求最少3幅监控图像。为此,提出互相关算法结合计算机视觉技术弥补质心算法不能对篇幅较少图像进行准确监控处理的不足,从而提高篇幅较少的图像三维监控准确度。将理想灰度曲线和真实灰度曲线相关后,通过互相关算法按照相关峰值运算其像素点的运输车辆真实距离,两个曲线相关后只会存有1个峰值,将运输距离信息和各个峰值对应后按照相对的延时运算此刻距离。一般脉冲时域为
C(u)=(u/σ)2exp(-u/σ)
(7)
其中,脉冲时域信号和脉冲宽度分别为C(u)和σ。
图像增强器ICCD的运输选通门宽通过矩形函数的方式表示为
(8)
其中,计算机视觉和运输选通门宽分别为uw和uh。
单个视觉像素点在理想环境中采集的能量是脉冲在选通门时间里的积分为
(9)
其中,灰度级理想曲线是O(uw,uh)。
理想曲线a(i)和实际曲线b(j)的互相关系为
(10)
互相关值最高时相对的视觉像素点(a,b)延时为
(11)
实际测量曲线中,第1个不是零点相对延时和互相关最高值相对的横坐标值分别为u1和a,实际测量曲线里相对的横坐标和获取最高值的时间间隔分别为a/2和a△u/2。图2为具体关系图。
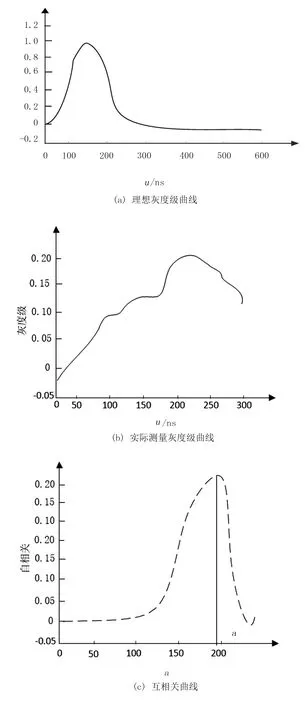
图2 各种曲线Fig.2 Various curves
相对运输距离信息为
(12)
2 实验结果与分析
为了验证本文芒果运输监控系统的有效性,将图3运输图像作为原始序列图像。由于篇幅限制,只列取第1幅和最后1幅。最后1幅为相同实验条件下将选通照明置于目标后面较远处所获得的背景图像,其余的运输目标选通成像距离范围为8.3~13.3 m。

图3 运输图像原始序列图像Fig.3 Image sequence of transport image
2.1 监控效果分析
图4为不同系的监控结果。由图4可以看出:文献[2]的运输监控系统的图像处理结果失真情况严重,图像信息丢失量大,只能大概得到一些运输到达地点等信息。文献[3]监控结果运输信息量多,但同样丢失许多有效的图像信息。本系统涵盖了原始图像的所有目标信息,清楚观察到运输车辆、货物及人员的细节信息。该图像的散粒噪声和脉冲噪声有一定程度的降低,图像的对比度与原始图像相比有很大程度的提升。
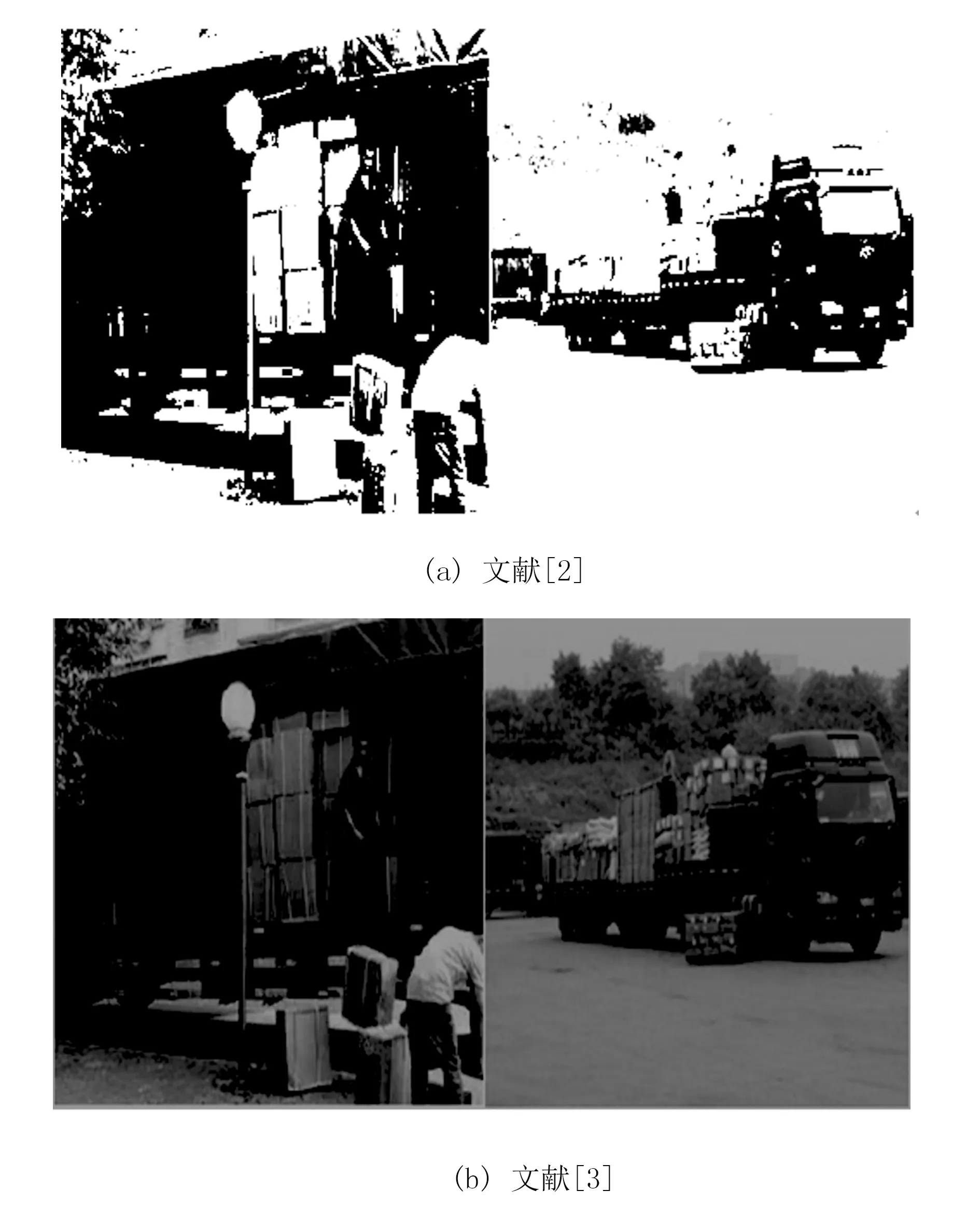
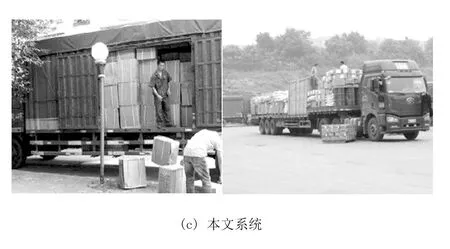
图4 运输选通图像监控结果Fig.4 Results of transport gated image monitoring
2.2 系统监控时间分析
本系统的监控时间耗费包括对芒果运输车辆距离信息的计算、像素延时和灰度值计算,结果如表1所示。由表1可知:本系统对芒果运输距离信息计算用时较短,计算灰度值用时的用时在2.6s上下变化,且总监控时间耗费分短;而对比系统的时间相对较长,表明系统对不同像素图例的监控耗时相差较小、抗干扰性强、稳定性高。
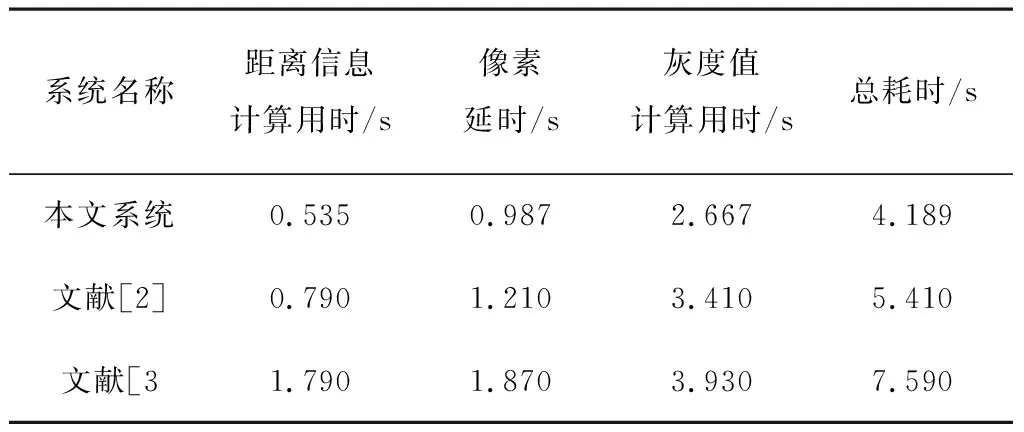
表1 不同系统的监控耗时Table 1 Monitoring time consuming of different monitoring systems
2.3 系统性能综合评价
为验证本文系统综合性能,采用专家评价法分别对本文系统、文献[3]系统及文献[3]系统的监控结果进行评价,包括3种方法对远距离大目标、近距离小目标和芒果图像的三维监控结果。专家评价结果如表2所示。分析表2可以得到如下结论:

表2 不同监控系统的专家评价结果Table 2 Expert evaluation results of different monitoring systems 分
1)本系统的三维运输图像监控效果满意度高。由对远距离大目标的评价结果可以看出:专家整体评价结果均在9.0分以上,评价平均分也在9.65分优秀水平上。分析本系统对运输图像的评价结果可以看出:系统对芒果图像监控的评价较高,平均评价得分为优秀水平。这说明,本文系统的监控综合性强。
2)文献[2]运输监控系统的专家整体评价处于中间水平,专家对远距离目标和运输图像的平均评价分别为6.4和7.65分,该得分较本文系统的评价相差5分左右。
3) 专家对文献[3]的运输图像监控的评价极低,监控平均低于6分,低于本文系统得分。这说明,本文系统的综合监控效果佳,对远距离大目标、近距离小目标及运输图像的三维监控均能得到较高的监控效果,综合应用性强。
3 结论
针对当前芒果运输监控系统的不足,设计了基于计算机视觉技术的芒果运输监控系统。首先获取运输监控系统框架,采用芒果运输模型求解运输选通门宽;然后,采用计算机视觉技术对相对运输距离信息进行分析,实现运输成像,完成芒果运输过程监控系统的设计。实验结果表明:所设计系统可有效对日光高散度图像实施监控,且图像监控效果清晰;对不同像素图像的监控用时较短,且专家对远距离大目标、近距离小目标和运输图像的平均评分高,系统监控效果评价高。
