多功能果园田间管理机设计与试验
2020-10-19林悦香尚书旗王东伟遇海涛张成福
林悦香,尚书旗,王东伟,遇海涛,张成福
(1.青岛农业大学 机电工程学院,山东 青岛 266109;2.高密市益锋机械有限公司,山东 高密 261501)
0 引言
我国农作物的栽培面积接近1.4亿hm2,其中果树栽种面积约占6%,果树种植面积和水果产量已经跃居世界第一。果树栽培面积和产量排在前列的有广东、山东和河北等省份,大宗果树种类主要是苹果、柑橘和梨[1]。现在我国农业产业化发展比较迅速,而果树又是一种经济效益较高的作物,这就要求果园生产需要高度机械化,特别是管理环节多样,亟需一种集多功能于一身的果园管理机来满足大型果园机械化生产[2-4]。本机依据不同果园的土壤差异和不同品种果树的栽植方式差异,为解决果园中肥料深施等多过程集成作业中存在的机械化关键技术难题[5],设计了斜置支撑与V型双圆盘组合升降式开沟机构及颗粒与粉状肥料定向兼施、块状有机肥开沟深施等关键部件,集定向开沟施肥自动回填、单独宽深开沟等多功能于一体,弥补了业内的空缺。
早在20世纪,国外就进行了果园开沟施肥机的研究,曾运用以铧式犁为主要部件的开沟机,其开沟深度为30~50cm,构造简单、速度快、效率高,但不适合在较硬的土地里进行作业活动,且开出的沟非常不规则,只依附拖拉机的牵引力,功率损耗极大。后期,随着大功率拖拉机的出现,旋转式开沟机已有生产,开沟深度较大,所需的牵引力较小、适应性强,能够打碎土块,所开沟形稳定规则[6]。目前,日本、德国和美国等,果园管理专用机械化水平达100%,但引进国外机械存在与国内的种植模式不适应且成本较高[7-8]等问题。
我国传统的果园种植形式是以乔化果园为主,空间狭小,大型拖拉机和农机无法进入,通过性差[9],而如果开沟施肥等环节全部人工实现,则存在用工短缺、劳动强度大、工作效率低[10-11]等缺点。东北农业大学研制的1KL-100型立式螺旋开沟机可以实现在旱田及水田地中挖沟[12]。云南农业大学研制的1KS-22型双轴开沟机可同时完成切土和抛土,从而实现开沟[13]。新疆农业科学院农业机械化研究所研制的LK-40型偏置式果园开沟机用于果园施肥开沟、种树开沟[14-18]。但是,以上设备都存在机型较大、通过性较差的问题,因此研发这样一款多功能果园管理机,是十分必要的,既能用于现代模式的宽行密植果园,又能用于目前占比较大(80%~85%)的传统乔化果园。
1 整机方案设计与工作原理
1.1 总体方案设计
自走式多功能管理机主要包括动力装置、施肥装置、开沟装置、传动装置和行走装置等,依靠机械传动及液压系统实现整机的各种动作,如图1所示。
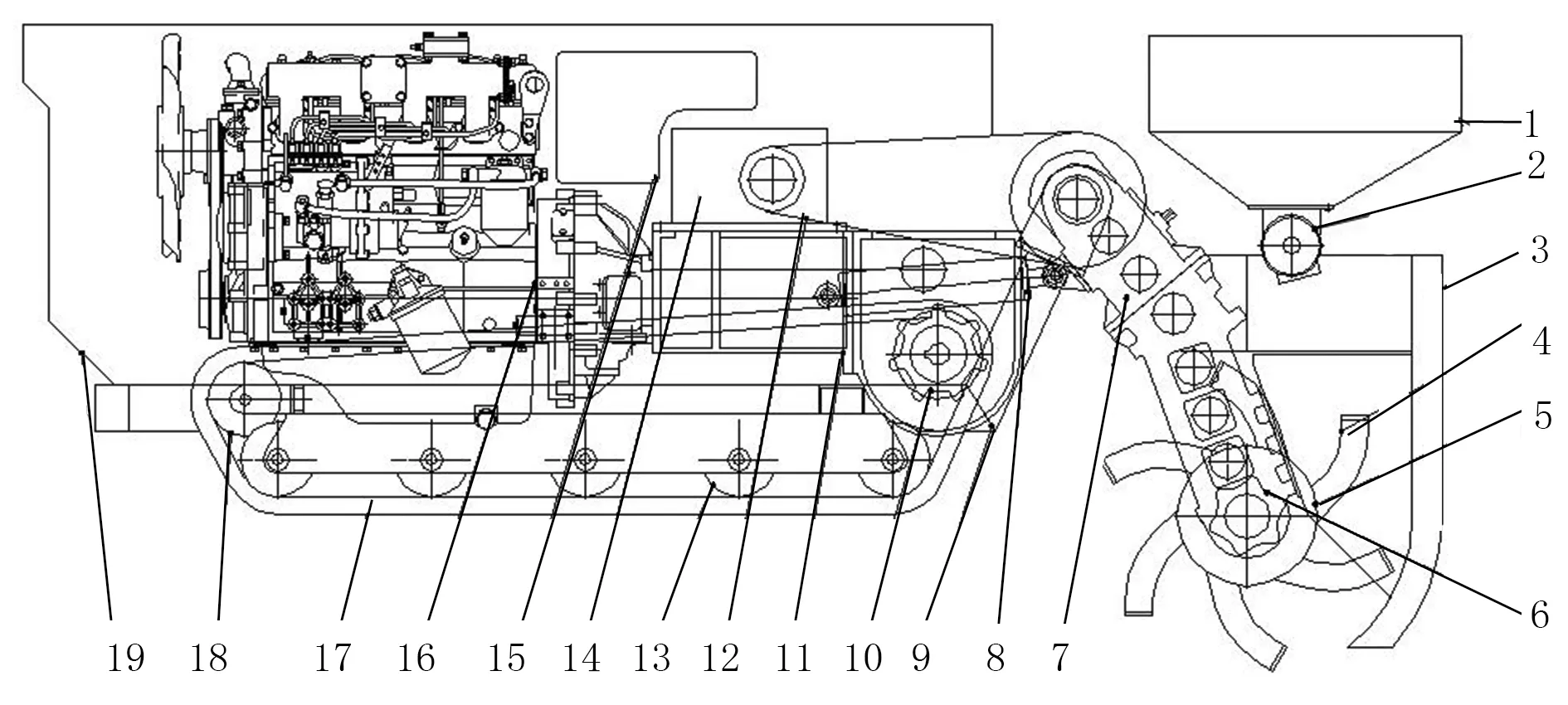
1.施肥箱 2.排肥器 3.开沟机罩壳 4.开沟刀 5.开沟刀安装座 6.传动箱 7.传动箱 8.油缸 9.机架 10.驱动轮 11.变速箱 12.传动链 13.支撑轮 14.动力输出箱 15.燃油箱 16.柴油机总成 17.履带 18.导向轮 19.罩壳图1 多功能田园管理机(开沟施肥回填状态)结构简图Fig.1 Sructure diagram of the multifunctional orchard and field management machine (ditching fertilization and backfill)
1)选择4缸柴油机为整机主要动力源,辅以液压装置完成机具的升降作业功能。
2)施肥装置:设计绞龙排肥器强制推进施肥,通过改变绞龙排肥器的转速和排肥器进肥口的大小控制施肥量,以解决传统的外槽轮式排肥器对粉状肥料无法正常施肥的技术难题[19-21]。
3)开沟装置:利用斜置支撑与V型双圆盘组合升降式的开沟机构。在传动箱输出轴的两端,安装双圆盘开沟刀,使其在工作过程中成V型状态转动,能用较小直径的圆盘刀实现宽深开沟,开沟深度达30~40cm。
4)传动装置:使用变速齿轮箱将发动机动力传递给行走装置和开沟施肥装置,开沟装置与变速齿轮箱之间用齿轮箱传动[22],可靠耐用。
5)行走装置:采用履带行走机构,可以在泥泞的果园田间实现平稳行走,对土壤压强小,附着性能好,在土壤潮湿及松软地带有较好的通过性能,牵引效率高[23-24]。
1.2 动力选型计算
1.2.1 牵引功率计算
行走装置所需牵引功率应满足以下要求,即
(1)
式中P行—行走装置所需牵引功率(kW);
F驱—行走机构所需驱动力(kN);
v—行走速度(km/h);
η1—传动机构效率;
η2—行走装置效率。
行走时,装置会受到内部阻力和外部阻力,外部阻力F1可以用机器的重力G和外部滚动系数乘积表示,即
F1=Gf1
(2)
其中,f1取决于工作环境,工作环境为果园和田间(多为黄土和黏土),则f1=0.07。
内部阻力F2是零件内部的滚动摩擦阻力,即
F2=Gf2
(3)
其中,f1一般取值为0.05~0.07,取f2=0.06。
整机质量1 300kg,行进速度取理论中间值3.8km/h, 那么驱动力可带入计算,即
F驱=F1+F2=G(f1+f2)
(4)
另取η1=0.95,η2=0.90,则行走所需牵引功率为
(5)
1.2.2 开沟施肥装置功率计算
根据设计任务要求,工作场合为农田和果园,开沟施肥装置功率P为[25]
P开沟=1×10-5Kλ·h·v·B
(6)
其中,Kλ为开沟比阻(N/cm2)。
Kλ=KgK1K2K3K4
(7)
式中Kg—土壤坚实度(N/cm2);
K1—沟深修正系数;
K2—土壤含水率修正系数;
K3—枝干落叶植被修正系数;
K4—作业方式修正系数[25];
h—开沟深度(mm);
v—前进速度(m/s);
B—开沟宽度(mm)。
根据实际要求,h= 350mm,v=0.42m/s,B=250mm;农业机械手册Kg=120N/cm2,K1=1.0,K2=0.95,K3=1.2,K4=0.48。将数值带入公式,则P开沟=24.1kW。
综合牵引功率与开沟施肥功率,选择配套动力为大于26kW的柴油机。
1.3 工作原理
多功能果园田间管理机主要包括行走模块、开沟回填模块、施肥模块及单独开沟等模块。发动机输出动力通过齿轮变速箱变速后分别传递到行走模块和开沟施肥等模块。行走模块采用履带式行走装置,避免轮式行走装置在低矮的果园中通过性较差问题。本机单条履带的牵引力便可达到整机质量的30%~40%,当单条履带停止转动时可实现最小转弯半径,转弯较轮式更为灵活。
开沟装置动力传递采用齿轮传动,传动可靠,避免了在恶劣工作环境中皮带传动及链传动故障频发问题。开沟刀具使用圆盘刀,利用斜置支撑与V型双圆盘组合升降式开沟机构,在传动箱输出轴的两端安装双圆盘开沟刀,用球笼轴承将输出轴和外壳连接,使其在工作过程中成V形状态转动,可以实现用较小直径的圆盘刀实现宽深开沟。
施肥装置采用绞龙装置排肥,可以有效简化结构,并实现颗粒肥和粉状肥兼施问题。通过更换尾部的装置可以实现多功能集于一身,达到快速切换工作状态的要求。
1.4 设计参数
本机设计参数与性能指标,如表1所示。
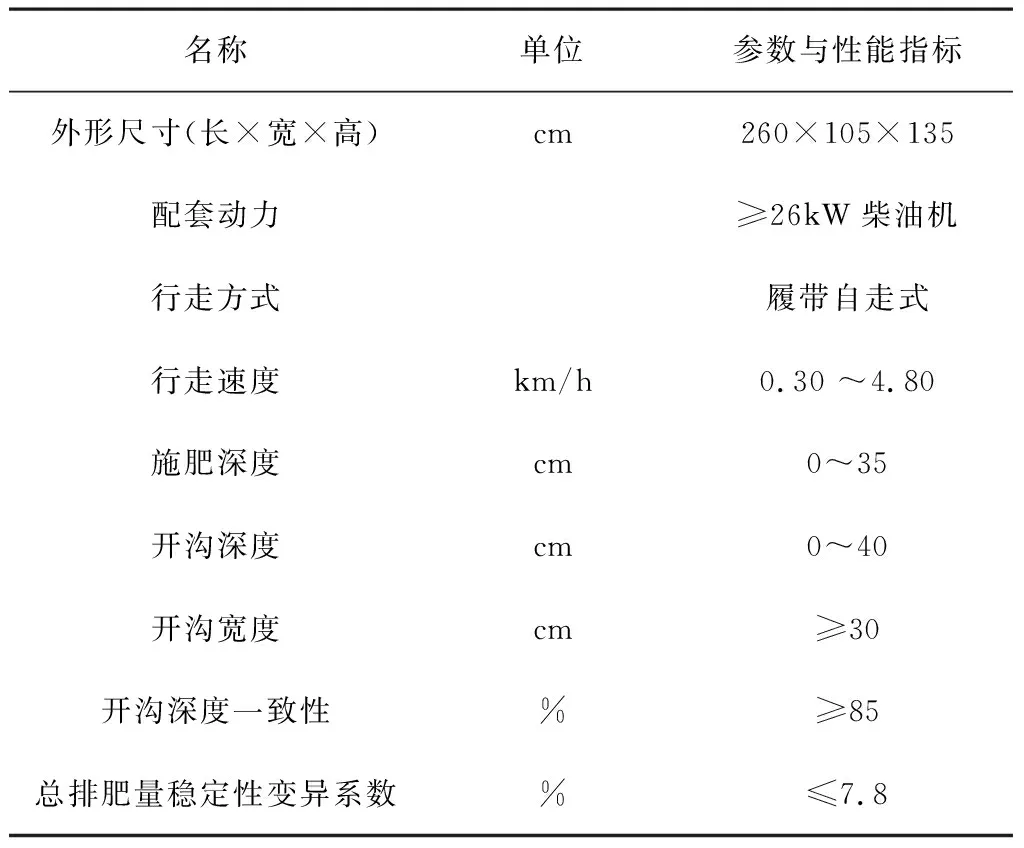
表1 设计参数与性能指标Table 1 Design parameters and performance indicators
2 开沟模块的设计
现在果园机械难以实现块状有机肥的深施,开发单独开沟装置(见图2),以便实现宽深开沟,施用大块有机肥,提高果品产量。
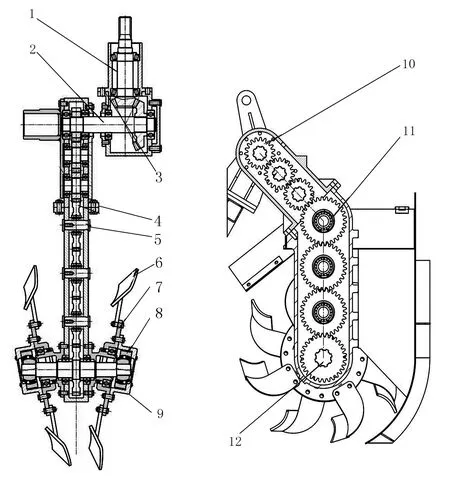
1.动力输入轴 2.锥齿轮 3.传动箱主轴 4.齿轮箱 5.齿轮轴 6.开沟刀 7.连接螺栓 8.轴承 9.轴承座 10.小齿轮 11.大齿轮 12.开沟刀轴图2 单独开沟装置Fig.2 Individual trenching module
开沟装置主要由齿轮箱、刀盘组成,通过齿轮箱传动,并通过输出轴带动开沟刀盘转动,开沟刀盘上的刀具随着刀盘转动,各个刀片依次切割土壤。由于刀具有一定的弧度,使得被切割土壤抛至沟的两侧,达到开沟的目的。开沟装置采用斜置支撑从而实现V形转动,实现可以用较小的刀盘直径开出更宽更深的沟槽。
2.1 刀具设计
由于斜置支撑的存在,开沟装置可以实现V形转动,无需较大的刀具弯角便可实现将沟内挖出的土抛至沟的两侧,防止其回填。
根据GB/T699-1999技术条件,应选用65Mn钢以达到开沟的强度等要求,切削刃须进行淬火处理,刃口曲线形状误差不大于3mm,满足设计要求。
2.2 斜置支撑设计
通过斜置支撑(见图3),实现开沟装置V形转动。在斜置支撑上套有轴承,实现刀盘和刀具绕斜置支撑转动,使得刀具可以做V形转动,用较小的直径便实现宽深开沟,达到要求的开沟深度和宽度。
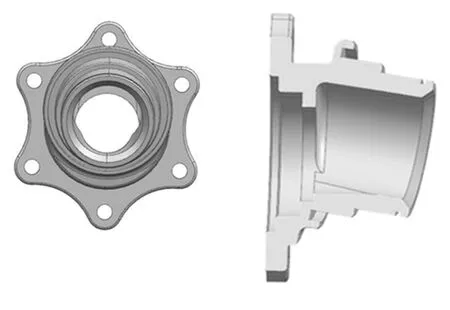
图3 斜置支撑Fig.3 Inclined support
3 开沟施肥回填装置设计
3.1 刀具设计
与单独开沟刀具不同,开沟施肥回填装置刀具采用弯刀[26],可以实现切土同时进行回填的功能,保证装置的有效性。因此,刀具采用65Mn钢以达到开沟的强度等要求,切削刃须进行淬火处理,刃口曲线形状误差不能大于3mm,满足要求。
3.2 施肥装置设计
施肥装置(见图4)可以实现颗粒与粉状肥兼施,通过绞龙装置强制推进排肥,解决了传统的外槽轮排肥器对粉状肥料无法正常排肥的技术难题,满足了现代果园的工作要求,并且可以通过调节绞龙装置的转速和改变上方进肥口的大小来控制排肥量,满足不同树龄果树需肥量不同的作业需要。

图4 施肥装置Fig.4 Fertilizing device
3.3 链传动设计
该传动输出用作肥料排出装置的驱动,所需力不需太大,所以链轮直径无需过大[27]。齿轮箱中输出为14齿,根据设计要求,施肥箱绞龙转速约为200r/s,齿轮输出转速为395r/s左右,则绞龙连接链轮设计为28齿,传动比为i=Z2/Z1=28/14=2,绞龙转速则为197.5r/s,满足设计要求。
为保证链轮传动的有效性,在两中间加装传动链张紧轮,使链条保持一定的张紧度,以提高链传动的稳定性。
3.4 螺旋排肥器设计
目前,已有果园机械的排肥装置多为外槽轮式排肥装置,主要依靠肥料自身的重力来实现排肥,会出现堵塞现象,且通过调整外槽轮的工作长度来改变排肥量,无法实现粉状化肥排肥量的控制,轻则造成肥料撒漏损失,严重时过多的肥料集中于作物根部导致作物烧根[28]。
本设计采用螺旋排肥器,当其沿轴向转动时,可以将内部的肥料排向外部,在其上方用隔板控制肥料进口的大小,防止过多肥料进入而阻塞。这样,可以有效解决颗粒状肥料和粉状肥料不能使用同一排肥器的问题,同时有效控制排肥速率,节省肥料,使肥料达到充分的利用。
绞龙的输送效率为
=0.167kg/s
(8)
式中λ—外壳与叶片间隙,λ=2.5mm;
D—外壳直径,D=115mm ;
d—叶片直径,d=110mm;
t—螺距,t=103mm;
n—转速,n=200r/min;
Ψ—输送肥料时的充满系数,Ψ=0.3;
y—输送物料容量,y=900kg/m3;
C—输送器的倾斜输送系数,C=1 。
该绞龙的设计中,肥料的输出效率大于肥料的输入效率,满足设计要求。
4 行走装置设计
由于作业环境存在较狭小情况,选择履带式行走装置(见图5),可以实现最小1.8m半径转弯,可以很好解决传统果园农机无法入园作业问题。

1. 导向轮 2.支撑轮 3.驱动轮图5 行走装置总成Fig.5 Walking device assembly
行走装置的动力来源于固定在输出轴的驱动轮上,装卡在履带中的孔隙,带动履带转动。机体的质量要压在支重轮上,支重轮起承重作用;导向轮承担导向作用,防止履带松动和跑偏。
4.1 履带宽度设计
履带宽度为
式中M—整机质量,M=1t。
因此,b=188~230mm,取履带宽度为230mm,满足要求。
4.2 履带接地长度设计
履带接地长度计算公式为
(9)
式中G—设备总重量,G=1000×9.8=9 800N;
[q]—设备平均接地压强,查《工程机械底盘构造与设计》可知,[q]=20kPa。
因此,L0=1.065m。本机有5个驱动轮,则平均每个驱动轮间隔267mm,满足要求。
5 试验数据及分析
为测试所制样机性能,在山东省潍坊市高密市升恒庄村的农场进行了开沟装置和施肥装置的试验,如图6、图7示。试验田土壤样本为棕色森林土。

图6 开沟装置试验过程照片Fig.6 Photo of test the trenching device

图7 开沟施肥回填装置试验过程照片Fig.7 Photo of test Ditching fertilization and backfill device
5.1 开沟装置试验数据
按照相同的作业长度、不同的作业档位和不同的开沟深度,进行了开沟数据统计分析,如表2所示。
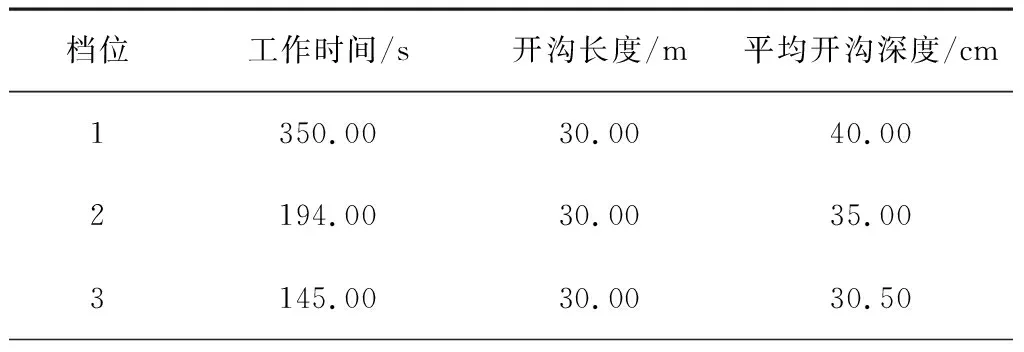
表2 开沟装置试验数据Table 2 Data of test the trenching device
5.2 开沟施肥回填装置试验数据
按照相同的作业长度、不同的作业档位和不同的开沟深度对回填的试验据统计分析,如表3所示。
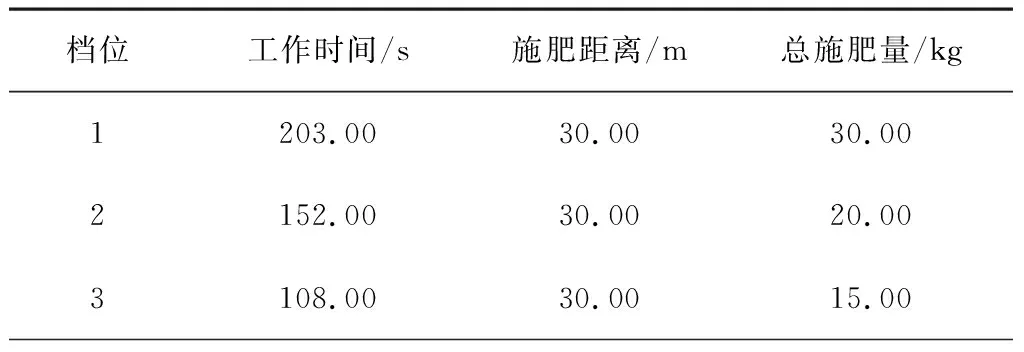
表3 开沟装置试验数据Table 3 Data of ditching fertilization and backfill device
5.3 单独开沟装置试验数据分析
试验数据表明:在最低档时,开沟宽度顶部为(45±1)cm,底部为(30.5±1.5)cm,开沟深度为(40±2)cm,平均前进速度为308.57m/h,总体开沟稳定性大于95%,符合《DG-T 072-2016田园管理机》的标准要求的85%,合格;高档位时,开沟深度需要适当调浅,宽度随之变窄,因为在高速前进时,开沟装置没有充足的动力供给,必须抬高装置来满足开沟要求,开沟的稳定性也大于标准要求[29]85%,符合设计要求。
5.4 开沟施肥装置试验数据分析
试验数据表明:施肥深度和施肥量与行走速度成反比,当速度低时,可以将肥料施到更深处。计算得知总排肥量稳定性变异系数≤7.8%,符合《DG-T 072-2016田园管理机》[30]的标准要求。
6 结论
通过实测数据得知,所设计样机能够达到设计标准要求。由于采用履带行走,可以用于现代宽行矮砧密植果园,又可用于传统乔化果园。本设计将果树生产管理多环节所需机械作业过程集合到一台机器上,提高了果园机械化水平更提高了作业效率,降低管理成本。样机实现了可以通用于粉状肥料和颗粒肥料排出,解决了槽轮排肥机构无法很好地将粉状肥料排出的问题。通过更换开沟刀具,可以实现大块有机肥宽深开沟问题,提高了肥料利用率,减少了人力的使用。
