应用原子鉴频技术的低轨卫星实时视向速度测量方案
2020-10-16叶晖张伟李发泉杨勇陈晓郑永艾陈阳舒适
叶晖 张伟 李发泉 杨勇 陈晓 郑永艾 陈阳 舒适
(1 中国科学院精密测量科学与技术创新研究院,武汉 430071)(2 上海卫星工程研究所,上海 201109)(3 中国科学院大学,北京 100049)
空间信息应用越来越依赖高精度的实时卫星轨道数据,而卫星在运行过程中受到高空稀薄大气、太阳辐射变化及地球重力场的影响,其轨道高度和运行速度随之发生变化,特别是对低轨卫星的影响尤其明显[1]。为了获得高精度卫星轨道信息,地面精确定轨手段日益丰富,模型精度不断提升,高性能精密定轨软件的成功研制与应用,使得地面对低轨卫星的定轨精度大大提高[2]。但是,在卫星上由于存在全球导航卫星系统(GNSS)时钟差误差[3],以及GNSS接收机所使用的广播星历精度不高[4]和星上处理器性能有限等原因,卫星实时定轨精度不是很理想,制约了实时卫星高精度遥感数据的应用和低轨卫星快速轨道机动等对卫星轨道数据时效性要求较高的卫星应用。
目前,卫星精确定轨研究主要集中在精密定轨跟踪方法、轨道动力学模型和精密定轨方法[5]。其中:精密定轨跟踪方法研究主要有激光测距技术(SLR)[6-7]、全球导航定位技术(基于GNSS)和多普勒地球无线定位技术(DORIS)[8]。轨道动力学模型研究包括不断提升重力场、大气阻力/大气密度、太阳光压等模型精度等[9]。精密定轨方法主要有运动学定轨方法、动力学定轨方法及简化动力学定轨方法[10]。对未来高精度、实时化、星地联合定轨的发展趋势,研究、采用新的技术方法,提高卫星实时测轨精度,对卫星的应用具有重要价值[11-13]。本文在现有研究的基础上,提出一种应用原子鉴频技术的低轨卫星实时视向速度测量方案,可为星上自主定轨提供相对地面某点的卫星实时视向速度测量信息,具有测量实时性强、精度高和可长期稳定运行的特点。
1 低轨卫星实时视向速度测量方案
1.1 实时视向速度测量需求分析
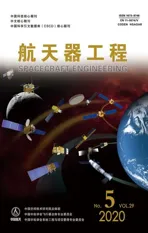
低轨卫星视向速度测量,即在可见弧段内卫星测量其相对地面观测点的视向速度和角度变化情况。不失一般性,以800 km轨道高度的低轨卫星为例,针对地基观测场景,对低轨卫星相对于地面观测点的运动情况进行分析,如图1所示。图中:v为卫星运动速度;vLOS为卫星相对光源的视向速度;θ为惯性坐标系OXYZ中光源-卫星波矢(光源指向卫星S)与v的夹角;R1为地球半径;R2为卫星至地心距离;α为地面激光发射光束仰角;β为纬度幅角;γ为卫星下视角;r为卫星轨道高度。
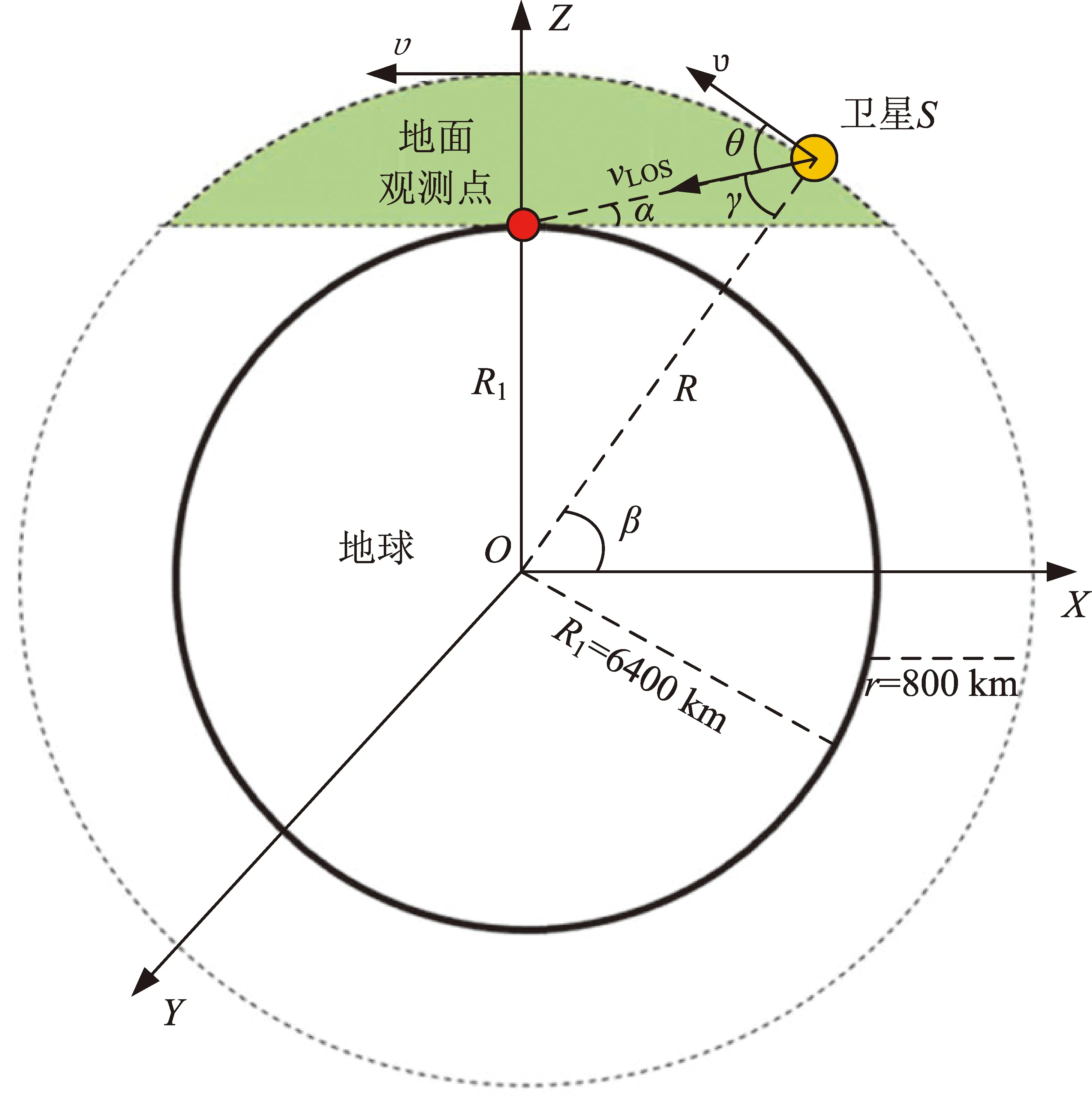
图1 低轨卫星视向速度模型Fig.1 Apparent velocity model of LEO satellite
在卫星从开始进入直至离开视场的过程中,卫星速度在卫星与地面观测点视向方向的速度分量每时每刻都在变化。需要说明的是,为了保证分析结果的普适性,下述分析并不针对一颗具体的低轨卫星,而只取一个较为理想的模型进行分析,对于一颗具体的卫星,需要根据实际轨道数据进行再分析。
卫星相对于地面观测点的视向速度满足
(1)
对800 km轨道高度的卫星相对于地面观测点的视向速度进行理论计算,计算结果如图2所示。以卫星正好处于地面观测点正上方的时刻为0时刻,对卫星视向速度与卫星相对地球运动之间的关系进行分析。从中可以看出,卫星从进入观测视场到离开观测视场大约需要800 s的时间。也就是说,地面站大约有13 min的时间可以对卫星的视向速度进行观测。考虑到地球大气等实际观测条件的影响,实际取值范围还要小一些。

图2 不同时刻的卫星视向速度(800 km轨道)Fig.2 Apparent velocity of satellite at different time (orbit altitude: 800km)
1.2 实时视向速度测量方案
针对低轨卫星速度的高精度测量需求,本文提出应用原子鉴频技术的卫星实时视向速度测量方案。该方案的基本原理是:利用光学多普勒效应测量卫星相对地面站的视向速度,通过建立地面站向卫星发射激光、卫星上的原子鉴频单元对激光频率进行鉴频处理,获得卫星相对于地面站的视向速度信息,再由通信下行链路向地面站远程传输视向速度信息,如图3所示。
应用原子鉴频技术的实时视向速度测量方案如图4所示,主要包括激光发射端和信号接收端。其中:激光发射端由原子移频单元、固态激光单元和捕获跟踪单元构成;信号接收端由凝视跟踪单元、原子鉴频单元和信号处理单元构成。
激光发射端和信号接收端分别安装在地面站和待测卫星上,两者通过星地测控实现协调控制。地面激光发射端的固态激光单元在原子移频单元和捕获跟踪单元的辅助下,向卫星上的信号接收端发射一束激光频率已知且实时变化的大功率激光光束,用于测量卫星的实时视向速度。激光发射端的捕获跟踪单元实现不同时刻卫星相对激光发射端位置的快速跟踪。信号接收端的原子移频单元实现激光频率的高精度锁定和快速切换。为确保卫星实时视向速度测量的精度,激光发射端发出的激光信号频率需要进行精密控制。
卫星信号接收端的凝视跟踪单元由跟踪装置和望远镜组成,跟踪装置对地面激光发射端发射的激光进行凝视跟踪,调整望远镜的朝向,再由望远镜对激光进行接收。望远镜接收到的激光信号通过光纤引入原子鉴频单元,原子鉴频单元对激光信号进行鉴频,对有效信号进行测量,并进行光电转换。光信号由原子鉴频单元转换成电信号后,通过电缆传输至信号处理单元。信号处理单元对信号进行处理和采集,并利用系统控制与通信单元与地面站进行通信,实现应用原子鉴频技术的低轨卫星实时视向速度测量。
实时视向速度测量方案中的系统控制与通信单元对其他单元进行总体控制,此外,还负责与环境监测设备、远程控制设备和数据服务设备的通信与控制。
1.2.1 卫星实时视向速度
在本文方案中,卫星为多普勒效应中的观测者,而地面站发射出激光,是多普勒效应中的光源。在光学多普勒效应中,当卫星(观测者)和地面站(光源)之间有相对运动时,卫星观察到的激光光源发出的频率将发生变化,这一频率变化即为多普勒频移[7-8]。实时视向运动速度v,光源频率f0及观测者观测到的激光频率fm满足如下关系[14]。
(2)
式中:真空中的光速c=299 792 458 m/s。
式(2)进行转换,可得
(3)
由于卫星与地面站的视向运动速度远小于光速,即v≤c,此时式(3)可简化为
(4)
因此,根据式(4),通过测量卫星观测到的激光频率fm及夹角θ,即可得到视向运动速度。在本文方案中,fm可通过原子光谱进行控制和测量。
1.2.2 激光多普勒频移测量
原子鉴频技术通过法拉第旋光理论实现原子滤光和原子鉴频[15-17],其工作原理如图5所示。原子蒸汽贮存在原子泡中,原子泡放在均匀磁场、均匀温度场中,磁场方向与光传播方向平行。在原子泡的两端安置严格正交的1对偏振镜。从左边输入的光,若其频率不能准确地激发原子泡中原子的某个能级跃迁,则会被正交安置的这对偏振镜阻挡;而对于能激发泡中原子跃迁的光,则经泡中原子与相应磁场的联合作用,可将其偏振方向旋转π或其奇数倍,从而可以顺利通过正交安置的这对偏振镜。如果输入的信号光就是这种能激发泡中原子跃迁的光,则信号光就会被挑选出来,从而实现“原子”滤光[18]。
基于原子鉴频技术原理,卫星观测到的激光频率fm通过原子鉴频可实现光学多普勒频移的测量,如图6所示。图中:蓝色实线为原子鉴频单元的鉴频函数,红色和黑色虚线分别表示发生多普勒频移前和发生多普勒频移后的激光频谱。由图6可知:由于多普勒频移效应,激光频谱落在原子鉴频器鉴频曲线的不同位置处,使得透过原子鉴频器的信号强度发生变化。因此,通过检测透射信号强度的变化就可以实现激光频率fm的测量,进而得到卫星相对地面站的实时视向运动速度。需要特别说明的是,透射信号强度变化的检测可以通过CCD或光电倍增管(PMT)等实现,通过选择高精度、短积分时间的CCD或PMT器件,可以做到10 ms乃至更高频率的实时速度数据输出,为星上应用提供一种实时速度的测量信息。
1.2.3 速度测量准确度与精度分析
应用原子鉴频技术的实时视向速度测量方法,其准确度由地面发射激光光谱稳定性、传播过程中的大气对激光的频率展宽影响及卫星原子鉴频单元性能共同决定。
地面激光发送端输出的激光光谱稳定性可以通过地面主动稳频技术实现,通过利用饱和吸收光谱技术或者偏振光谱技术可以将产生的激光频率锁定在相应的跃迁线上,目前可将激光的频率稳定在1 MHz以内[19]。同时,地面激光发送端的发射频率可以实时监控,且可以维护。彻底消除该项影响的一种方案是,地面将激光频率变化数据实时上行给卫星,卫星在自主速度测量过程中消除激光光源的频率抖动因素。
大气对激光的影响主要分为大气散射和大气湍流两种[20]。在本文方案中,由于地面采用连续激光波束且出射激光能量低,因此由于大气引起的光强闪烁、光束弯曲与漂移、光束时域展宽等影响主要改变激光信号的强度,对激光信号中心频点的影响较小[21]。本文方案中采用的原子鉴频技术,是通过敏感激光频率的多普勒频移实现的,因此大气对地面激光束的影响可以忽略。
卫星原子鉴频单元通过比较相同种类原子的相同能级跃迁来实现测速,因此原子鉴频单元的性能由其中所携带的原子数密度的稳定性决定。通过技术手段确保卫星原子鉴频单元的原子数密度稳定,可以大幅降低原子鉴频单元引入的测量误差。同时,卫星原子鉴频单元谱型参数及工艺固定后,其探测性能随之稳定,且星上可标定,这也是原子鉴频速度测量方法所具有的一个独特优势。
由于本文方案所有的速度测量结果均为实时测量,因此对长时间测量而言,速度测量精度误差产生的影响可以通过时间平均,实现抵消。根据原子鉴频单元的鉴频原理,通过提高信号探测能力,优化原子鉴频器谱型参数,增强系统光力,可以进一步提高灵敏度,有望达到优于1 mm/s的精度,同时提高数据更新率至10 ms。
2 方案验证
本文通过数据仿真的方式对卫星实时视向速度测量方案进行验证。仿真数据使用德国地学研究中心(GFZ)公布的“挑战性小卫星有效载荷”(CHAMP)卫星2003年5月11日星载GPS观测值、对应时间的GPS超快速预报(IGU)星历,轨道参考值使用GFZ公布的后处理科学轨道数据(PSO)[22]。应用原子鉴频技术的卫星实时视向速度模拟速度测量信息由CHAMP卫星后处理科学轨道数据中的速度信息模拟生成。定轨精度仿真流程如图7所示,速度测量信息与GPS数据预处理结果、低轨卫星动力学模型一起输入扩展卡尔曼滤波定轨算法,并进行精度评估。
首先进行简化动力学定轨仿真(仿真状态1),即仅使用GPS载波相位观测量,在没有原子鉴频视向速度数据加入的情况下,结合卫星动力学方程得到卫星实时三轴定位精度为0.428 8 m(均方根误差),具体仿真结果如图8和图9所示。其中:图8为X,Y,Z方向位置误差仿真结果;图9为X,Y,Z方向速度误差仿真结果。保持上述状态不变,同时加入X,Y,Z方向速度数据(精度均为1 cm/s),仿真得到三轴定位精度为0.408 8 m,比没有速度信息时略有提升,见图10和图11。进一步提高速度数据精度,在仿真状态1基础上加入精度为1 mm/s的X,Y,Z方向速度数据(每个速度数据只提供一个轴的速度),此时三轴定位精度提升至0.384 m,见图12和图13。

图8 没有实时视向速度数据时的卫星位置误差Fig.8 Satellite position errors without real-time apparent velocity data
注:采样间隔为10 s;速度误差均值为0.004 7 m/s。图9 没有实时视向速度数据时的卫星速度误差Fig.9 Satellite velocity errors without real-time apparent velocity data
图10 加入实时视向速度数据(精度1 cm/s)时的卫星位置误差Fig.10 Satellite position errors with real-time apparent velocity data accuracy of 1cm/s

图11 加入实时视向速度数据(精度1 cm/s)时的卫星速度误差Fig.11 Satellite velocity errors with real-time apparent velocity data accuracy of 1cm/s

图12 加入实时视向速度数据(精度1 mm/s)时的卫星位置误差Fig.12 Satellite position errors with real-time apparent velocity data accuracy of 1mm/s
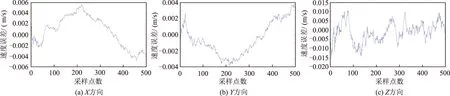
图13 加入实时视向速度数据(精度1 mm/s)时的卫星速度误差Fig.13 Satellite velocity errors with real-time apparent velocity data accuracy of 1mm/s
综合动力学模型、GPS观测信息、不同精度下的卫星实时速度测量信息的仿真结果,见图14和图15。当采用卫星实时速度测量信息后,卫星实时定位精度和实时定速精度均得到提升。对图14和图15进行分析可以发现:加入实时速度测量信息后,从较长的时间尺度上看,低轨卫星的定位和定速精度是有一定提升的,但是在某些特定的时间点上,定位精度和定速精度有时提升有时恶化,这是因为在不同时刻GPS观测值的精度和速度测量信息的精度都在波动,有些弧段可能会出现GPS观测值质量比较高,引入速度测量信息后反而会使最终定位结果恶化。
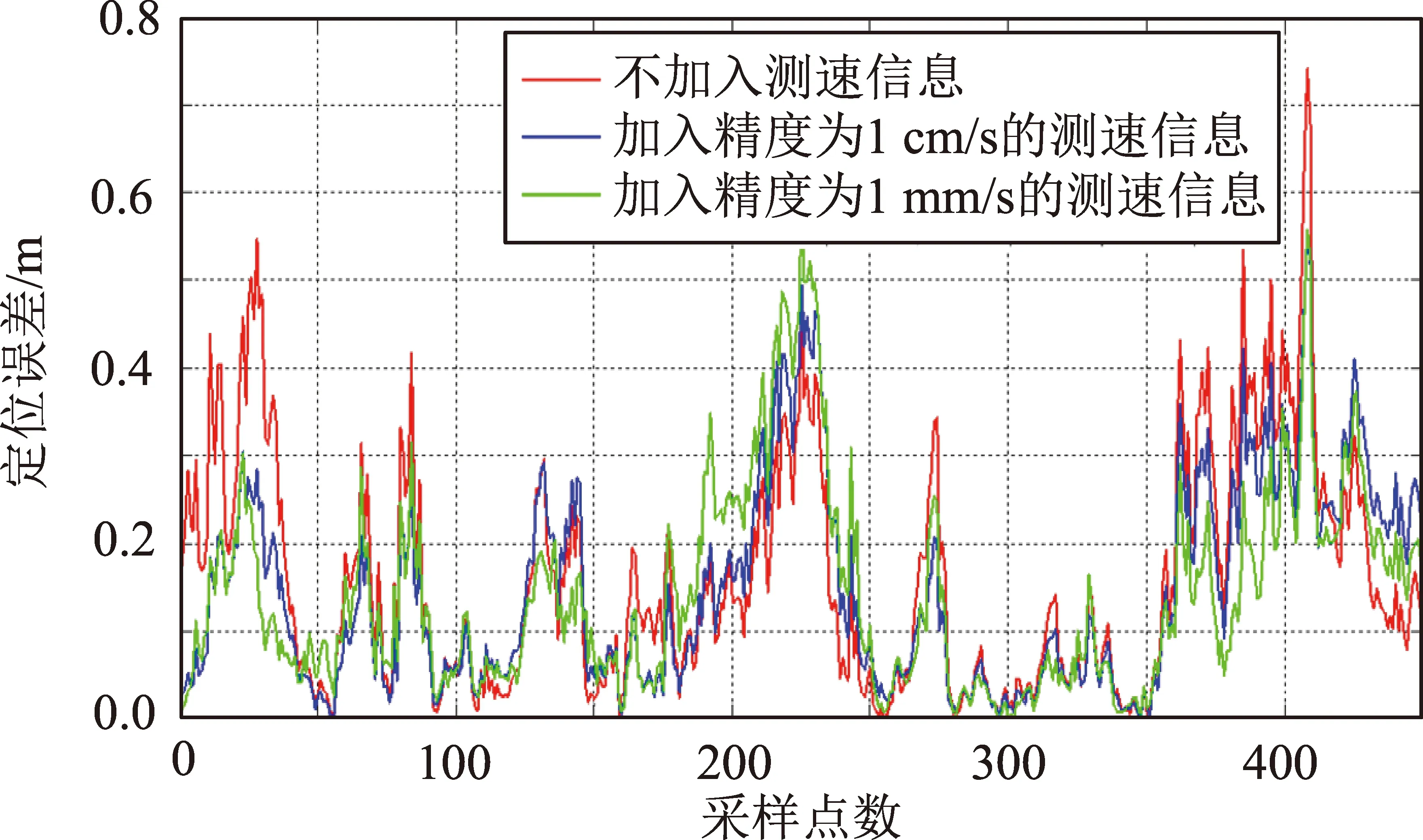
图14 3种不同状态下的卫星定轨误差Fig.14 Satellite orbit determination errors in three different states
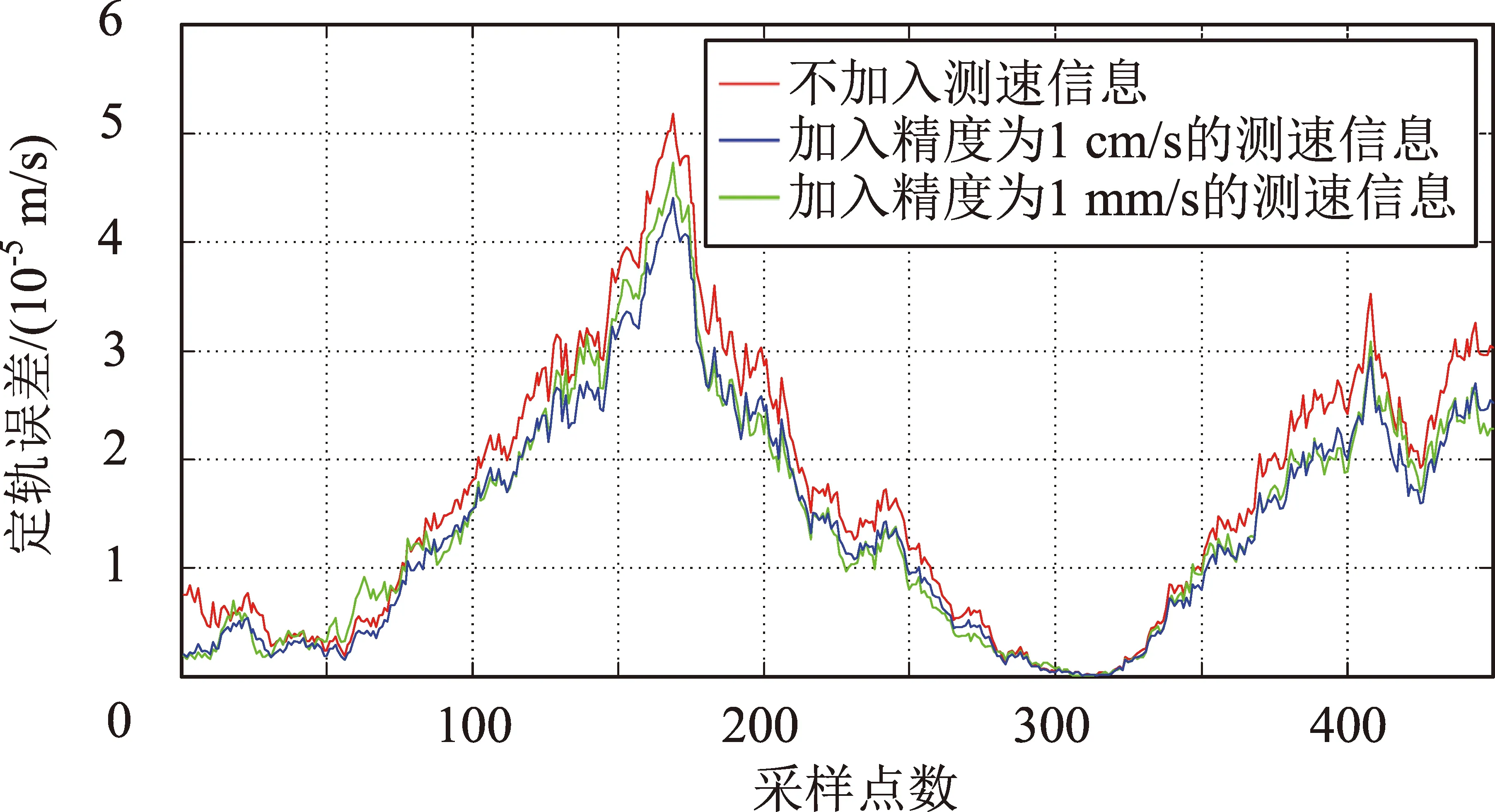
图15 3种不同状态下的卫星速度误差Fig.15 Satellite velocity errors in three different states
对仿真计算结果进行统一,见表1。在1 mm/s的速度测量精度下,可使卫星实时定位精度提升约10%,定速精度提升约17%。
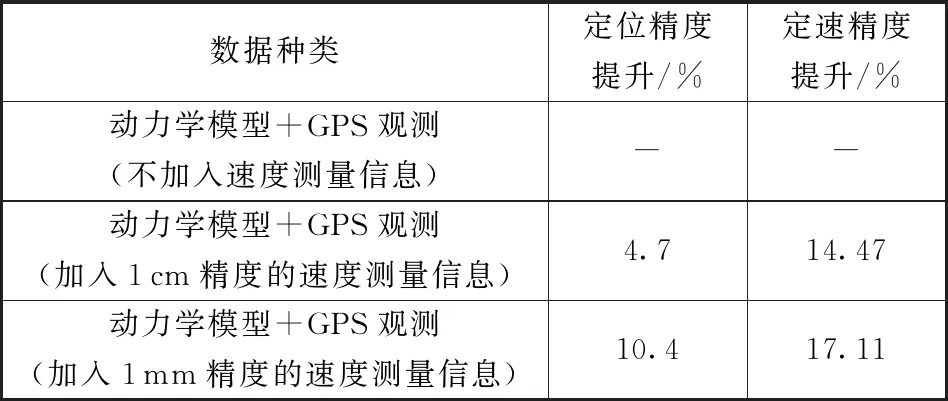
表1 定位、定速精度结果统计Table 1 Statistics of positioning and fixed speed accuracy results
3 结束语
通过方案研究与仿真,应用原子鉴频技术的低轨卫星实时视向速度测量方案可使卫星实时定位精度和定速精度获得提升。特别需要说明的是,本文的仿真是以10 s为周期将速度测量信息加入扩展卡尔曼滤波定轨算法得到的结果,而应用原子鉴频技术的卫星实时速度测量方案的最大优点是速度测量数据实时产生(按现有能力,可每100 ms输出一组速度测量信息),且速度测量误差不累积。因此,深入研究速度测量数据的应用方法,进一步发挥速度测量信息高时间分辨率的特点,还能进一步提高卫星实时定速、定位精度。