Throughput optimization for multi-channel cooperative CR under reporting channel errors
2020-10-15WangCongJiangWeiSongTiechengBaoXuHuJing
Wang Cong Jiang Wei Song Tiecheng Bao Xu Hu Jing
(National Mobile Communications Research Laboratory, Southeast University, Nanjing 210096, China)
Abstract:To overcome the problem of channel fading and noise uncertainty, cooperative spectrum sensing (CSS) is developed to enhance the sensing performance in cognitive radio networks (CRNs). Considering that the non-ideal reporting channels of CSS can cause an adverse impact on the detection performance, the throughput maximization problem for multi-channel CSS cognitive radio under reporting channel errors is investigated. While providing all the primary users with sufficient protection, the average throughput of secondary users (SUs) is maximized by jointly optimizing the sensing duration, detection threshold and SU assignment. To address the non-convex optimization problem, the optimal energy detection threshold is derived first. Then, a sub-optimal greedy algorithm is proposed to obtain the optimal sensing duration and the optimal SU assignment. Analysis and simulation results show that the proposed algorithm can output the same performance as the exhaustive search algorithm at a much lower level of complexity. It is also shown that the impact of imperfect reporting channels should be considered especially in low signal-to-noise ratio environments and the reporting channel errors significantly reduce the performance of CSS.
Key words:cognitive radio; multi-channel; cooperative spectrum sensing; reporting channel errors
With the significant growth of various wireless applications, spectrum resources are becoming more scarce. Cognitive radio (CR) is proposed as a promising technology to improve the utilization of the radio frequency spectrum[1]. Opportunistic spectrum access is an important access means for CR, in which the secondary users (SUs) can opportunistically utilize the unused frequency bands that belong to the primary users (PUs). Therefore, spectrum sensing plays a crucial role in opportunistic spectrum access without causing detrimental interference with the PUs[2]. Recently, various spectrum sensing methods have been developed to conduct spectrum detection, such as coherent detection, feature detection and energy detection. In this paper, we focus on energy detection since it is simple and able to detect the primary signal without any prior information. However, due to the noise uncertainty, multipath fading or hidden terminal problem, these sensing methods inevitably suffer from unreliable sensing results. To improve the sensing reliability and accuracy, cooperative spectrum sensing (CSS) has attracted extensive attention and applications for CR[34].
CSS is an effective technique for mitigating the detrimental impacts of channel fading in CR[514]. In CSS, multiple SUs individually report their local sensing results to the FC, which makes a global decision to determine whether a PU is present in the authorized band. In Ref.[5], a sensing-throughput tradeoff problem for the CSS scenario was formulated to find the optimal sensing time and the fusion thresholdkthat maximize the throughput of the SUs, but it did not consider the reporting channel errors between the SUs and the FC. The optimalN-out-of-Krule over imperfect reporting channels were derived by Banavathu et al.[6]for heterogeneous CRNs.However, they did not consider the protection constraint for the PU. The throughput of CRNs with CSS using them-out-of-Krule was maximized by optimizing themvalue and theKvalue while guaranteeing sufficient protection for the PU[7], but they did not optimize the spectrum sensing parameters. A fusion rule based on dynamic grouping was proposed for the distributed CSS in heterogeneous CRNs, where the SUs in different groups were assigned different weights to achieve information fusion[8], whereas the authors assumed that no burst errors were present in the reporting channels.
The above works[58]are mainly concerned with the user cooperation in a single-channel scenario, whereas practical CR usually has multiple PU channels that can be utilized by SUs. Therefore, joint sensing of multiple channels is necessary in CRNs as it can provide more transmission opportunities for SUs and thus improve the system throughput. Considering the variety of sensing performances and channel utilizations for a multi-channel scenario,Huang et al.[9]studied the optimization of the cognitive terminal assignment strategy in the coordinated spectrum sensing but without optimizing the sensing time and detection threshold. Yu et al.[10]maximized the average throughput of multi-channel CR under the constraints of detection probability for each channel by jointly optimizing the sensing time, SU assignment and energy detection threshold. Azarfar et al.[11]investigated the problem of joint transmission and CSS strategy optimization for a multi-user multi-channel dynamic spectrum access networks. However, Refs.[911] assumed that the reporting channels between the cognitive users and the fusion center (FC) are error-free, which is not realistic in practical CR systems since the reporting channels also suffer multi-path fading or interferences[1214]. Both the sensing parameters and the reporting channel errors have an important influence on the performance of CSS, and the PUs have the priority over SUs in using the licensed spectrum. Therefore, in this paper, we take all of these factors into account and investigate the throughput maximization problem for multichannel CSS with reporting channel errors under hard decision fusion rules.
First, the global detection and false-alarm probabilities in terms of reporting channel errors at the FC are derived. Then, the throughput maximization problem for multi-channel CSS is formulated while giving all the PUs effective protection by jointly optimizing the sensing time, detection threshold and SU assignment. To tackle the non-convex optimization problem, the optimal energy detector threshold at each channel is derived first. Then, a sub-optimal greedy algorithm is proposed to obtain the optimal SU assignment and the optimal sensing time to maximize the spectrum access opportunities. The numerical results are presented to compare the performance between the proposed algorithm and the exhaustive search algorithm under perfect and imperfect reporting channels. The impacts of reporting error probability and channel utilization on the throughput are also analyzed.
1 System Model
In this paper, a CRN with a FC,Nprimary channels, andMSUs is investigated. We consider the case where the SUs outnumber the channels, i.e.,M>N. Hence, a couple of SUs can cooperate to sense the same channel. Each channel is licensed to one PU, and at a particular period of time, the channel may be inactive and is available for the SUs to transmit data. However, before utilizing the spectrum, the SUs have to sense the channel state (i.e., inactive ‘0’and active ‘1’) by energy detection and only access the inactive channel. We assume that at least one SU is assigned to sense one PU channel and one SU is only allowed to sense one PU channel. The cooperation amongMSUs is controlled by the FC.

The reliability of local spectrum sensing is usually evaluated by two performance metrics, namely, false-alarm probability and detection probability. The former represents the probability that the SU falsely identifies the free channel as being busy while the latter denotes the probability that the SU correctly identifies the busy channel as being busy. The probabilities of false alarm and detection over channelican be given as[10]
(1)
(2)
2 CSS with Reporting Channel Errors
CSS is applied to improve the sensing performance by combining the sensing decisions from different spatially located SUs. Basically, CSS is performed in two successive phases: sensing and reporting. Several SUs independently sense the channel in the sensing phase and then forward their local decisions to the FC in the reporting phase. Finally, by fusing all local decisions, the FC makes a global decision on the existence of the PU.

(3)

(4)

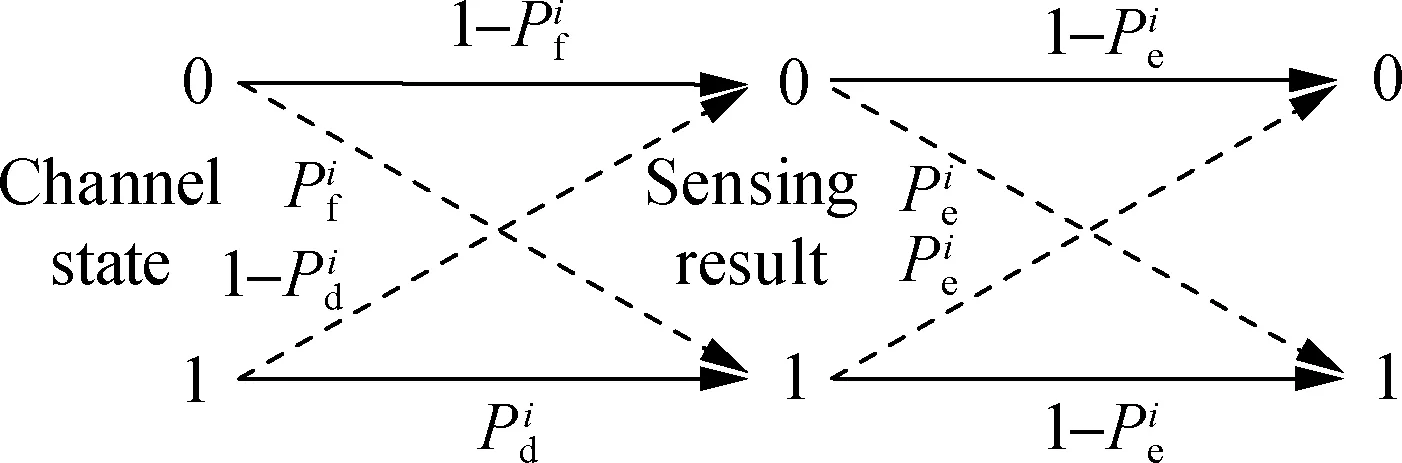
Fig.1 Single spectrum sensing with reporting channel error for the i-th channel
In this paper, we consider two hard decision fusion rules: “OR” rule and “AND” rule, which pertain to the extreme cases of the voting rule and have been widely used.

(5)

(6)

(7)

(8)
3 Problem Formulation and Solution
3.1 Problem formulation

(9)

(10)
Accordingly, letμidenote the utilization of channeli, i.e., the active state probability of PUs on channeli. It can be computed as
(11)

(12)
(13)
In this paper, our aim is to maximize the average throughput of SUs while protecting all the PUs from harmful interference by jointly optimizing the sensing duration, energy detection threshold and SU assignment. Therefore, the optimization problem for multi-channel CSS with reporting channel errors can be formulated as
(14)
s.t.
(14a)

(14b)

(14c)

(14d)

(14e)
whereφiis the minimum target detection probability on channeliwhich protects the PU;φiis the maximum false alarm probability on channelito ensure the opportunistic spectrum access of SUs.

(15)
3.2 Proposed optimization algorithm


(16)

Based on the above discussions, Problem P1 can be simplified to Problem P2 as
(17)

(17a)
(17b)

(17c)
To solve problem P2, we transform problem P2 to P3.
(18)
s.t.
1≤mi≤M
(18a)
(18b)
(19)
(19a)
Following a similar process as adopted in Ref.[5], we can also prove thatR2(τs) of Problem P4 is a unimodal function. Hence, the optimal sensing time in problem P4 can be obtained by efficient search algorithms such as the binary searching method. Algorithm 1 presents the proposed greedy algorithm to achieve the optimal sensing time and the optimal SU assignment.
Algorithm1Greedy algorithm
Input:T,fs,τr,M,N,φi.
Output:The optimal SUs assignment {mi}.
for alli=1 toNdo
Letmj+1←mj.
Letmj+1(i)←mj(i)+1.

endfor

j←j+1.
end while
The optimal SUs assignment {mi} is obtained, and the corresponding optimal sensing time can be obtained by solving P4.
3.3 Complexity analysis
The computational times of solving Problem P4 by the proposed greedy algorithm are compared with the exhaustive algorithm as shown in Tab.1 withN=5 given[10]. We can see that whenM>N, the proposed greedy algorithm only requires (M-N)Noptimization operations. GivenN, the complexity of the greedy algorithm only linearly increases with the increase in the number of SUs, while asM-Nincreases, the complexity of the exhaustive search algorithm rapidly increases. Thus, the proposed algorithm is much easier and faster than the exhaustive algorithm, especially whenMandNare large.

Tab.1 Comparison of the complexity
4 Simulation Results

In Fig.2, the maximum average throughput versus the number of cooperative SUs under perfect and imperfect reporting channels are plotted for the proposed greedy algorithm and the existing exhaustive algorithm. It is evident that the maximum average throughputs of these two algorithms match well with each other. We can see that the average throughput of the “AND” rule is superior to that of the “OR” rule. This is because the global false-alarm probability of the “AND” rule is lower compared with “OR” rule, and therefore, more transmission opportunities can be offered to SUs to transmit data, thus improving the average throughput of the system.It is also observed that the imperfect reporting channels indeed worsen the global detection performance and cause the throughput to decrease.

Fig.2 Maximum average throughput vs. the number of cooperative SUs
Fig.3 illustrates the optimal sensing time versus the number of cooperative SUs under perfect and imperfect reporting channels for the “AND” rule. It is observed that as the number of cooperative SUs increases, the optimal sensing time decreases. Besides, with a given number of SUs, the optimal sensing time is longer under imperfect reporting.Hence, less time will be left for data transmission, resulting in the throughput degradation of the system.

Fig.3 The optimal sensing time vs. the number of cooperative SUs
Fig.4 shows the maximum average throughput versus the reporting channel error probability with differentγifor the proposed greedy algorithm and the exhaustive algorithm. In this figure, the reporting error probabilities on different channels are assumed to be the same. Similar to Fig.2, the proposed greedy algorithm coincides with the exhaustive solution. It can be seen that the throughput displays a more obvious decreasing trend with lower SNR. Hence, the reporting channel errors should not be ignored especially when the SNR environment is poor. Besides, compared to the “OR” rule, the throughput of the “AND” rule decreases slightly and is affected little by the reporting errors under higher SNR. This is because in the “AND” rule, the FC declares that a channel is active when all the local decisions say that it is active, and thus the robustness against reporting channel errors can be improved.
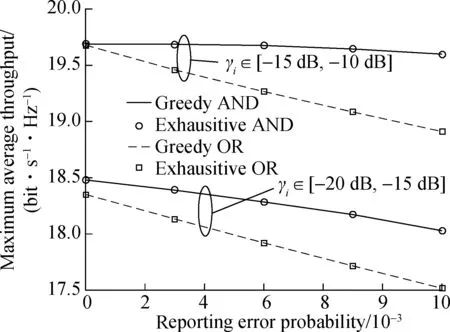
Fig.4 Maximum average throughput vs. the reporting channel error probability with different γi
Fig.5 shows the maximum average throughput versus sensing time with different channel utilizationsμi. It is seen that the larger the channel utilization, the lower the maximum average throughput. This is because larger channel utilization implies that the channel is busy most of the time and the SUs will have little chance to access the channel, and thus the throughput declines. Moreover, we can discover that at first, the “OR” rule has a greater throughput than the “AND” rule. However, when the sensing time further increases, the throughput of the “AND” rule is larger instead. The reason is that when the sensing time is short, the “OR” rule has a lower global false alarm probability; when the sensing time is long enough, the “AND” rule has a lower false alarm probability instead, which indicates that more unused spectrum can be exploited by the SUs, thus improving their average throughput.

Fig.5 Maximum average throughput vs. sensing time with different μi
5 Conclusions
1) In this paper, we investigated the throughput maximization problem for multiple channel CSS over imperfect reporting channels. Considering the impact of reporting channel errors, the effective false alarm probability and detection probability at the FC are derived.
2) The detection threshold, sensing duration and SUs assignment are jointly optimized to maximize the average throughput of SUs while maintaining the quality of service of all PU channels.A sub-optimal greedy algorithm is developed to obtain the optimal sensing time and the SUs assignment.
3) Numerical results show that the proposed greedy algorithm achieves the same performance as that of the exhaustive search algorithm but with a much lower complexity, and the average throughput under the imperfect reporting channels is always lower than that under the perfect case.
杂志排行

Journal of Southeast University(English Edition)的其它文章
- Hub location of air cargo company in air alliance
- Analysis of optimal referral reward programsfor innovative offerings
- Modeling the special intersections for enhanced digital map
- Numerical investigation of liquid sloshing in FLNG membrane tanks with various bottom slopes
- Effects of admixture on properties of recycled aggregate mortar
- Investigation of the environmental impacts of steel deck pavement based on life cycle assessment