综合地球物理方法在海底管道检测中的应用
——以舟山大陆引水工程为例
2020-10-14王恒波
王恒波
(1.自然资源部 第三海洋研究所海洋与海岸地质实验室,福建 厦门361005;2.中国地质大学(武汉)地球物理与空间信息学院,湖北 武汉430074)
随着海洋经济的迅速发展以及人类生活水平的不断提高,为了海底石油输送以及海岛居民供水供电等的需求,人类在海底铺设了越来越多的海底管线。由于受海流冲刷或者地质灾害等因素的影响,海底管线会出露海底,甚至悬空、变形,从而造成管线的破裂或断裂,供水供电等海底管道的断裂会影响海岛居民正常的工作生活,而海底石油管道的断裂很可能会造成巨大的经济损失和生态灾难。因此,定期检测海底管线,尤其定期检测强潮汐环境下的海底管线显得尤为重要。
如何快速、高效和准确地获取海底管道的在位状态是海底管道检测的关键所在。近年来,众多学者尝试研究多种方法对海底管线状态进行准确检测,如来向华等[1]、魏景灏等[2]、蒋俊杰等[3]和安永宁[4]分别采用侧扫声呐对海底管线悬空状态进行检测测量,获取了海底管线的悬空和出露状态,但单独的侧扫声呐数据精度和准确度不够,而且无法探测埋藏管线状态;王继立等[5]采用浅地层剖面探测方法对海底管线进行检测,能够准确地获取管道的埋藏深度和出露高度,但是,浅地层剖面探测获取的是断面信息,对管道整体的出露长度、位置偏移等状态信息缺乏直观表现,也无法了解管道周边的地形变化和微地貌特征等;周兴华等[6]和董玉娟等[7]分别采用侧扫声呐和浅地层剖面探测相结合的方式对海底管线状态进行检测,可形成互补,提高检测的效率和准确度。除了上述声学方法,还有磁力仪探测和水下人工探摸等方法,各有优缺点:磁力仪局限于探测磁性体,无法探测无磁性管道,而人工探摸虽然能够获得管道的准确位置,但是费时费力,仅限于小范围探测或者验证。随着海底声学技术的发展,单波束测深系统、多波束测深系统、侧扫声呐系统和浅地层剖面系统等多种声学探测设备在精度和使用方便性方面都有了极大的提高[8],它们完全能够满足海底管线在位状态探测的要求。
舟山群岛位于杭州湾南部,是中国最大的群岛。杭州湾是典型的高含沙量、强潮型海湾,海底管线容易受到潮流冲刷影响。本文以杭州湾南部舟山大陆引水工程海底管线检测项目为例,将应用单波束测深、多波束测深、侧扫声呐探测和浅地层剖面探测方法对海底管线的整体在位状态进行检测,以期快速、高效、准确地摸清海底管线悬空、出露、浅埋等埋藏状态,为后续的管道治理与保护提供技术支持。
1 材料与方法
1.1 研究区概况
研究对象为舟山大陆引水工程项目中位于杭州湾口南部的4条海底水管,水管下海端在宁波镇海,登陆端在舟山马目,走向大致为NE向。4条水管分三期建设,自南向北分别为一期管道、二期管道南、二期管道北、三期管道,管道间距50~80 m;一期管道外径1.0 m,设计埋深1.0~1.5 m,埋设时间为2001年;二期管道管径1.2 m,设计埋深1.0~1.5 m,埋设时间为2012年;三期管道管径1.2 m,设计埋深1~2 m,铺设于2017年。
研究区海底地形特征为西南部浅,东北部深且地形起伏较大,整体平缓东倾。研究区主要有西部浅滩和东部潮流冲刷槽两大地貌单元。西部浅滩位于路由西南部,从镇海海岸至10 m 等深线处(图1),距离约20 km,约占路由总长度的2/3,平均坡度0.25/1000(约0.9'),属于灰鳖洋西部浅滩;东部潮流冲刷槽位于路由东北部,处于杭州湾口冲刷堆积平原与岛间潮流冲刷槽的交汇海域,海底地形起伏较大,最大水深约20 m,主要包括西堠门冲刷槽尾梢和菰茨门冲刷槽尾梢地貌(图1)。

图1 海底管线位置Fig.1 Location of submarine pipelines
1.2 研究方法
2018年7月至8月,我们完成了舟山大陆引水工程海底管道检测的野外测量工作,在此期间,采用的研究方法主要有单波束测深、多波束测深、侧扫声呐探测和浅地层剖面探测。
1.2.1 单波束测深
单波束测深系统采用换能器垂直向下发射短脉冲声波,声波遇到海底时反射返回,并被换能器接收,通过声波在海底间的双程旅行时间和水介质的平均声速确定水深值[9]。单波束测深系统的特点是单点连续测量,数据沿航迹十分密集,而在测线之间没有数据分布。
本研究采用HY1600型数字式测深仪(无锡海鹰加科海洋技术有限公司生产)进行单波束测深,主要用来测量近岸5 m 以内浅水区,作为对多波束测深的补充。
1.2.2 多波束测深
多波束测深系统的工作原理与单波束测深仪的工作原理相似,但不同之处是:单波束测深通过接收声波的反射信号进行测量,而多波束测深通过接收声波的反向散射信号进行测量。多波束测深系统的信号发射和接收是由n个组成一定角度分布的指向性正交的2组换能器来完成的。发射单元平行于船纵向(龙骨)方向,并呈两侧对称向正下方发射扇形脉冲声波。接收单元沿船横向(垂直龙骨)排列。在垂直于测量船航向的方向上,通过波束形成技术在若干个预成波束角方向上形成若干个波束,根据各角度声波到达的时间或相位就可以分别测量出每个波束对应点的水深值[10]。若干个测量周期组合起来就形成了一条以测量船航迹为中心线的带状水深图,因此多波束测深系统也被称为条带测深系统[11]。
本次多波束测深采用Reson SeaBat 7125 sv2多波束系统,工作频率为200 k Hz,波束为256束,多波束测线沿管道路由方向布置,测线间隔50 m,在浅水区根据数据覆盖情况适当增加测线密度,确保工程海域大于5 m 水深的海域范围内多波束数据全覆盖。数据覆盖了管道两侧100 m 区域。通过潮位改正,得到研究区水深数据,并据此绘制海底地形图。
1.2.3 侧扫声呐探测
侧扫声呐的工作原理是声呐换能器发出声脉冲,声脉冲遇到海底或水中物体后发生散射,换能器接收返回的反向散射波,并将返回的声波由声能转换成电能,距离近的回波先到达换能器,距离远的回波后到达换能器,在设备终端的显示器或记录器上形成一条扫描线,扫描线的灰度强弱取决于海底底质性质和海底起伏形态。扫描线一条紧挨一条有序地排列起来,形成一幅记录图像,这样我们便可观察海底的所有特征和位于海底面的目标[6]。
本研究侧扫声呐探测采用美国Klein S3000型侧扫声呐系统,工作频率为100 k Hz或500 k Hz,单侧量程选用50~75 m,以满足分辨率和覆盖宽度的要求,达到相邻测线扫测范围重叠100%的要求。测量GPS接收天线和声呐拖鱼之间的位置关系,利用声呐采集软件自带的Layback模块进行位置改正。侧扫声呐与多波束测深同步进行,测线与多波束测线相同,声呐数据有效覆盖宽度为管道两侧各100 m 区域。通过对侧扫声呐的处理和解释,确定海底管道出露情况,确定海底障碍物的位置、形状、大小和分布范围等,了解冲刷地貌等海底微地貌特征。
1.2.4 浅地层剖面探测
浅地层剖面探测的工作原理是浅地层剖面仪的换能器按一定时间间隔垂直向下发射声脉冲,声脉冲穿过海水触及海底以后,部分声能反射返回换能器;另一部分声能继续向地层深层传播,同时回波陆续返回,声波传播的声能逐渐损失,直到声波能量损失耗尽为止。通过测量声波穿透地层传播的时间,测量地层厚度,反映地层分层情况和各层底质特征[6]。
本次浅地层剖面探测采用美国EdgeTech 3200-XS浅层剖面系统工作频率2~12 k Hz,测线垂直于海底管道布设,测线长度400 m,测线间隔50 m,获得垂直管道断面655幅,通过对浅地层剖面的处理和解释,获得管道埋深位置信息及路由区浅部地层结构信息。
2 结果与讨论
2.1 水深地形
通过对单波束测深和多波束测深数据的处理,绘制了研究区水深地形图(图2)。由图2可知,研究区水深(Z)变化范围为2.0~19.5 m,西南侧海底以浅滩为主,沿管道长约18.5 km,水深2.0~12.0 m,平均水深7.0 m,由西南向东南微倾;东北侧为2个凹槽,沿管道长约12.9 km,分别为西堠门潮流冲刷槽的尾梢影响区和菰茨门潮流冲刷槽的尾梢影响区,水深分别为12.0~19.5 m 和12.0~14.0 m;舟山登陆段长约1.6 km,为水下岸坡和边滩,水深2.0~12.0 m。

图2 研究区海底地形Fig.2 Seafloor topography of the study area
2.2 海底地貌特征
通过单波束测深、多波束测深以及侧扫声呐探测,我们查明了研究区海底地貌总体特征以及海底微地貌特征。研究区海底地貌总体特征为:西南部浅滩地貌,地形平坦;东北侧有2个冲刷槽,分别为西堠门冲刷槽和菰茨门冲刷槽。海底微地貌有海底管道平面位置偏移、管道出露位置和出露长度、管道沟以及海底片状冲刷区等。研究区有一处海底管线平面位置偏移,位于一期管道KP12.9—KP14.6处,最大偏移145 m;管道出露分为在管道沟内出露和在平均泥面以上出露两种情况,大部分情况为在管道沟内出露,一期、二期和三期管道均有在管道沟内出露的情况出现,其中,二期管道南线和北线在冲刷区(大约KP10.0—KP21.0)均大面积出露,一期管道和三期管道在管道内出露的情况只是零星出现(图3和图4)。在平均泥面上出露的海底管道主要是少部分二期管道和三期管道镇海近岸段和马目近岸段;管道沟在研究区广泛存在,为管道敷设后未完全回淤的沟槽(图5),大多数沟内管道未出露,仅少部分管道沟内管道出露;海底片状冲刷区在路由约KP9—KP19海域,冲刷微地貌呈条带状或不规则片状,走向近NW—SE 向,与该海域潮流流向相近,相对冲刷幅度可达数十厘米,部分冲刷微地貌叠加比较明显的流痕(图6和图7)。

图3 多波束探测到的管道出露Fig.3 Exposures of submarine pipelines detected by multi-beam bathymetry
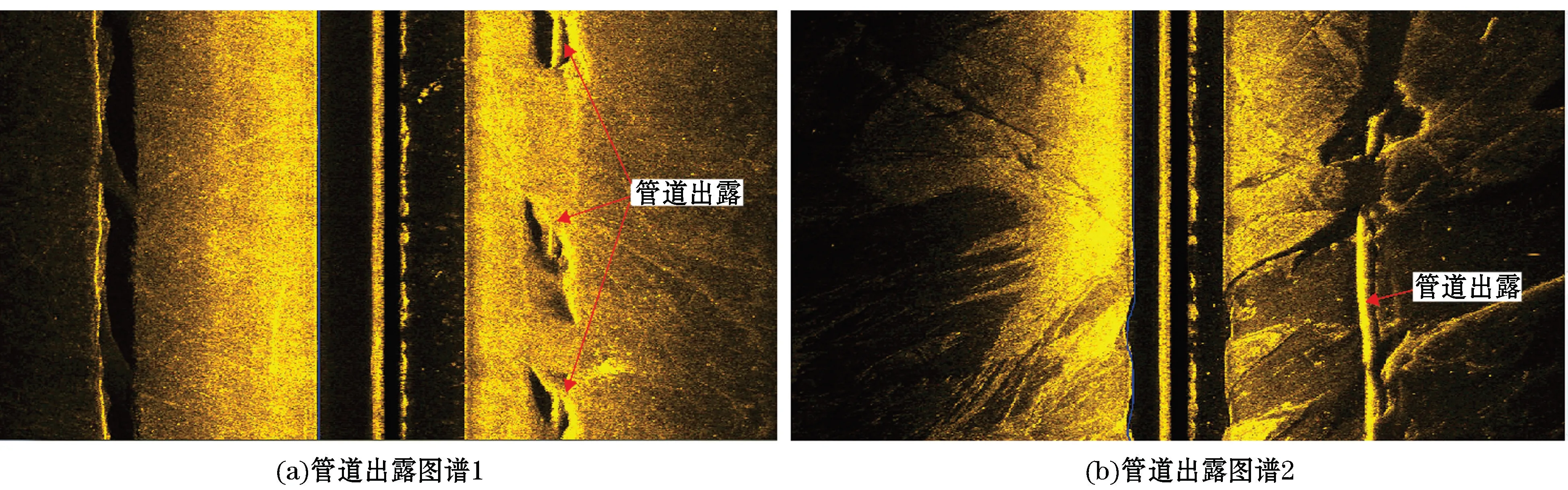
图4 侧扫声呐探测到的海底管线出露Fig.4 Exposures of submarine pipelines detected by side-scan sonar

图5 多波束探测到的海底管道沟Fig.5 Submarine pipeline grooves detected by multi-beam bathymetry
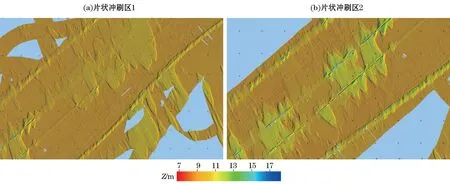
图6 多波束探测到的海底片状冲刷区Fig.6 Seabed sheet scouring area detected by multi-beam bathymetry
2.3 管道埋藏状况
研究区内4条海底管道为一期管道、二期管道南线、二期管道北线和三期管道,管道埋藏状况可以分为管道浅埋区(可回淤)、管道浅埋区(不回淤)、管道出露区(管沟内)、管道出露区(海底面上)和未来危险区五种。管道浅埋区(可回淤)是管道处于浅埋、临界出露状态,但位于淤积区,后期会自然回淤的区域;管道浅埋区(不回淤)是管道处于浅埋状态,但位于冲刷区,后期不会自然回淤的区域;管道出露区(管沟内)是管道在管沟内出露的区域;管道出露区(海底面上)是管道直接出露于海底面之上的区域,主要由管道沟深度不足所致;未来危险区是海底管道区暂时满足设计埋深要求,但管道处于冲刷区,经过一段时间管道可能出现浅埋、出露或悬空状况的区域。海底管道在浅地层剖面图谱上表现为抛物线形状的绕射波,抛物线顶部指示管顶位置,管顶位置为海底面以上表示管道出露(图8),管顶位置为海底面以下且深度小于设计埋深表示管道浅埋(图9)。根据探测结果绘制了研究区海底管道埋藏状况图(图10),由图10可知,管道出露主要见于二期管道南线和二期管道北线,多位于海底冲刷区位置,一期管道和三期管道仅在近岸段有零星出现;管道浅埋在4条管道均有出现,主要位于近岸段和海底冲刷区。
1)一期管道:KP5.20-KP7.85为管道浅埋区(可回淤),KP9.10-KP9.65为管道浅埋区(不回淤),该位置管道浅埋并有3处明显的管道出露情况,KP10.40-KP18.35为未来危险区。
2)二期管道南线:KP7.50-KP10.05,KP11.50-KP12.05,KP22.45-KP23.95和KP24.40-KP28.35为管道浅埋区(不回淤),KP19.20-KP19.80 和KP31.40-KP31.95 为管道浅埋区(可回淤),KP10.10-KP11.40和KP12.20-KP13.70为管道出露区(管沟内)且位于冲刷区,最大出露高度为1.0 m,管沟平均深度约为1.1 m,管道后期不会自然回淤;KP18.60-KP18.85为管道出露区(管沟内)且位于淤积区,平均出露高度约为0.2 m,最大出露高度为0.5 m,管沟平均深度约为0.3 m,后期会自然回淤;KP24.00-KP24.35为管道出露区(海底面上),平均出露高度约为0.3 m,最大出露高度为0.8 m,该处管道处于冲刷区,后期不会自然回淤。KP13.80-KP16.90为未来危险区。
3)二期管道北线:KP8.75-KP10.05,KP21.35-KP23.60 和KP24.40-KP29.4 为管道浅埋区(不回淤),KP31.50-KP31.80为管道浅埋区(可回淤),KP10.15-KP11.75,KP12.70-KP13.05和KP21.00-KP21.30为管道出露区(管沟内)且位于冲刷区,后期不会自然回淤;KP23.70-KP24.35为管道出露区(海底面上),平均出露高度约为0.3 m,最大出露高度为0.7 m,处于冲刷区,后期不会自然回淤;KP13.05-KP16.95为未来危险区,在该区发现5处管道微出露于管道沟内的情况。
4)三期管道:KP0.15-KP0.25,KP0.60-KP0.80 和KP31.60-KP32.60 为管道出露区(海底面上),KP6.30-KP6.65为管道浅埋区(可回淤),KP11.3-KP18.5为未来危险区。

图8 浅地层剖面探测到的海底管线出露Fig.8 Exposures of submarine pipelines detected by sub-bottom profiler

图9 浅地层剖面探测到的海底管线浅埋Fig.9 Shallow buried state of submarine pipelines detected by sub-bottom profiler
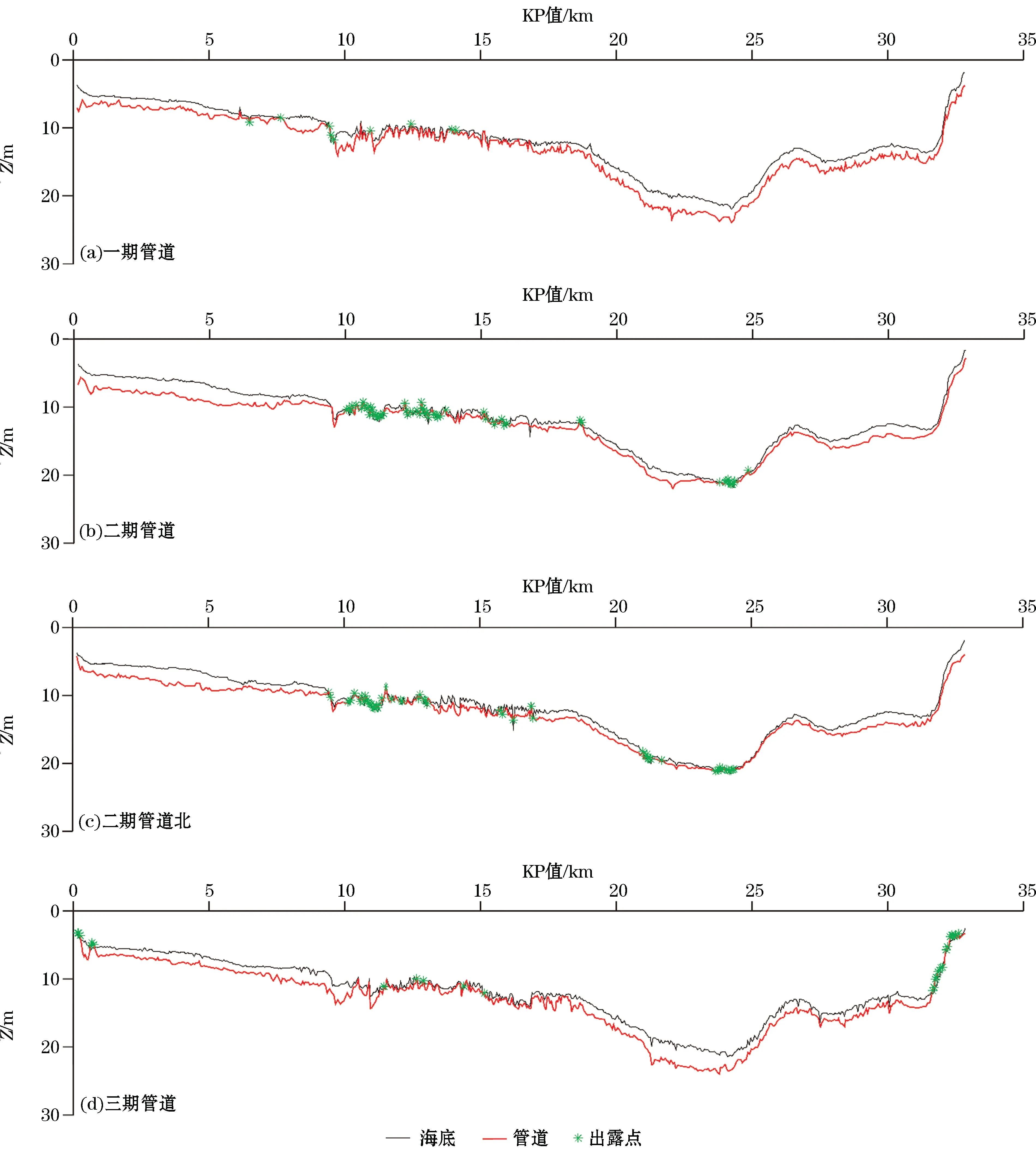
图10 研究区海底管道埋藏状况Fig.10 Buried status of submarine pipelines in the study area
3 结 论
舟山大陆引水工程是解决舟山市水资源紧缺的重要工程,位于杭州湾南部海域,该海域属于强潮海域,背景冲刷强烈,路由区内有菰茨门冲刷槽和西堠门冲刷槽两个潮流冲刷槽,所以,对该工程海底供水管线的定期检测十分重要。本次检测充分运用了4种地球物理方法,包括单波束测深、多波束测深、侧扫声呐探测和浅地层剖面探测。多波束测深系统测量范围大、测量速度快、精度和效率高,特别适合在水深大于5 m 的海域进行大面积的海底地形探测,单波束测深用于水深小于5 m 的浅水区域作业,是多波束测深的有效补充,通过单波束和多波束测深,可以了解测区整体海底地形特征。多波束测深和侧扫声呐结合,可以查明研究区海底地貌总体特征以及海底微地貌特征,准确查明海底管道平面位置偏移、管道出露位置和出露长度、管道沟位置等管道信息;浅地层剖面探测通过合理的测线布设,可以准确地查明海底管线悬空、出露或浅埋状态;浅地层剖面探测和多波束、侧扫声呐结合分析,可以清晰地了解出露管线的具体特征和出露范围。因此,综合地球物理方法的应用,可以有效地增强不同数据之间的互补,提高海底管线检测的效率和质量。
参考文献(References):
[1] LAI X H,PAN G F,GOU Z K,et al.The application of side scan sonar system in submarine pipeline detection[J].The Ocean Engineering,2011,29(3):117-211.来向华,潘国富,苟诤慷,等.侧扫声纳系统在海底管道检测中应用研究[J].海洋工程,2011,29(3):117-211.
[2] WEI R H,CHEN T X,GUO C.Application of side scan sonar system in submarine pipeline suspension survey[J].Hydrographic Surveying and Charting,2014,34(2):63-65.魏荣灏,陈铁鑫,郭晨.侧扫声纳系统在海底管道悬空调查中的应用[J].海洋测绘,2014,34(2):63-65.
[3] JIANG J J,TANG M Q,ZHENG X L.Application of side scan sonar system in submarine pipeline suspension survey[J].China Science and Technology Information.2008(14):49-51.蒋俊杰,汤民强,郑西来.侧扫声纳系统在海底管道悬空调查中的应用[J].中国科技信息,2008(14):49-51.
[4] AN Y N.The detection principle of side scan sonar and its application in the detection of submarine pipeline suspension[J].Coastal Engineering,2017,36(2):58-62.安永宁.侧扫声呐探测原理及其在海管悬空治理检测中的应用[J].海岸工程,2017,36(2):58-62.
[5] WANG J L,HUANG P Y,HU T J,et al.Application of sub-bottom profiler in submarine pipeline detection[J].Ship& Ocean Engineering.2013,42(3):161-163.王继立,黄潘阳,胡涛骏,等.浅地层剖面仪在海底管道检测中的应用[J].船海工程,2013,42(3):161-163.
[6] ZHOU X H,JIANG X J,SHI Y Z.The application of side-scan sonar and sub-bottom profiler in the detection of submarine pipelines in Hangzhou Bay[J].Hydrographic Surveying and Charting,2007,27(4):64-67.周兴华,姜小俊,史永忠.侧扫声纳和浅地层剖面仪在杭州湾海底管线检测中的应用[J].海洋测绘,2007,27(4):64-67.
[7] DONG Y J,ZHOU H J,WANG Z H.Application of side scan Sonar and sub-bottom profiler in submarine pipeline detection[J].Journal of Waterway and Harbor,2015,36(5):450-455.董玉娟,周浩杰,王正虎.侧扫声纳和浅地层剖面仪在海底管线检测中的应用[J].水道港口,2015,36(5):450-455.
[8] JIN X L.Development of ocean geophysics and acoustic techniques for seabed exploration[J].Progress in Geophysics,2007,22(4):1243-1249.金祥龙.海洋地球物理研究与海底探测声学技术的发展[J].地球物理学进展,2007,22(4):1243-1249.
[9] LAI X H,PAN G F,FU X M,et,al.Application of single-beam echo sounding techniques in submarine pipeline inspection[J].The Ocean Engineering,2007,25(4):66-72.来向华,潘国富,傅晓明,等.单波束测深技术在海底管道检测中应用[J].海洋工程,2007,25(4):66-72.
[10] LI C G,WANG W W,YAN J,et al.The study on traditional multibeam and interferometric multibeam hydrographic surveying and charting,2007,27(2):70-80.李成刚,王伟伟,阎军,等.传统多波束系统与具有相干特点的多波束系统的研究[J].海洋测绘,2007,27(2):70-80.
[11] LI J B.Principle,technology and method of multi-beam surveying[M].Beijing:China Ocean Press,1999.李家彪.多波束勘测原理技术与方法[M].北京:海洋出版社,1999.
