基于云模型的图像阈值分割方法∗
2020-10-14颜若尘
颜若尘
(江苏科技大学 镇江 212003)
1 引言
图像分割就是将图像按照一定需求进行划分,并从中提取出需要的目标区域的技术与过程[1]。常用的图像分割算法主要分以下几个大类:阈值分割、区域分割、边缘分割以及某些基于特定理论的分割算法等[2]。
其中阈值分割是一种简单直接并且有效的图像分割方法,其基本原理是假设图像只由背景和目标两部分构成,根据设置图像灰度级的最佳阈值,将图像像素分割成背景和目标两部分[3]。在阈值分割领域,最大类间方差法(Ostu)被认为具有通用性,适合运用于实际分割[4]。然而目前主流的图像分割方法都是基于确定性的硬分割,在图像分割过程中就不可避免地存在许多不确定性,影响分割效果[5]。例如图像在阈值化的过程中就会存在模糊性、不明确性以及不稳定性,因此削弱图像分割过程中的不确定性对图像造成的影响,就成为图像处理领域的重要研究方向之一[6]。
研究模糊控制的李德毅教授于1995 年提出的云模型概念,成功地实现了定性概念与定量数值之间的相互转换。云模型是在传统模糊集理论和概率统计的基础上提出的,在实现定性与定量相互转换的同时,体现出了其中的不确定性,使不确定性程度以数学的形式表达了出来[7]。
基于云模型对处理不确定性问题的优势,本文提出一种利用云模型来确定最优阈值的图像分割方法,该方法结合了两者的优点。首先利用云变换将图像的灰度曲线用n 个云模型来拟合,将生成的原子云模型作为泛概念树的叶结点,在此基础上进行概念跃升,得到基于云模型的图像泛概念树,从而可以确定出最优阈值,对图像背景和目标进行初步划分,结合概念树中图像背景和目标的云模型,运用极大判定法来得到图像分割结果。
2 云模型简介
2.1 云模型
“云”或者“云滴”作为云模型的基本元素,可以用联合概率( x,μ )的形式来类比[8]。其基本的定义如下:设U 是一个用固定数值表示的定量论域,C 是U 上的一个定性概念,若定量值x ∈U ,且x是定性概念C 的一次随机实现,x 对C 的确定度μ( x )∈[0 ,1] 是有稳定倾向的随机数:

则x 在论域U 上的分布称为云,每一个x 称为一个云滴[9]。 μ( x )作为云滴的确定度,反映了每次随机实现的模糊性。
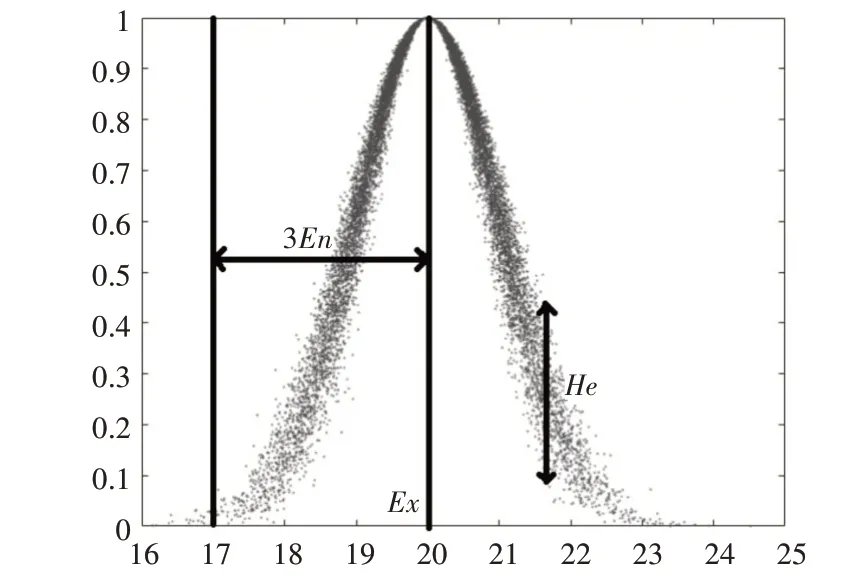
图1 云的数字特征图
图1 所示云模型用三个数字特征来共同表示一个概念,这三个数字特征分别为期望Ex(Expected Value)、熵En(Entropy)和超熵He(Hyper Entropy),所代表的具体含义如下[10]。
期望Ex:是最具代表性的点,最能够代表这个定性概念,是云滴群重心的位置。
熵En:是该定性概念的不确定性度量,即反映了该定性概念随机性与模糊性,同时说明了随机性与模糊性之间关联性。
超熵He :是熵的熵,也就是熵的不确定性的度量,由熵的模糊性和随机性决定,反映了云滴的凝聚度[11]。
云模型用这三个数字特征表征一个概念,在实现了定性与定量之间相互转换的同时,也将存在的模糊性与随机性考虑了进去。
2.2 正向云发生器
高斯分布是概率论中最重要的分布,基于高斯分布的云模型,正是本文所用云模型,以下统称为云模型。其定义如下:
设U 是一个用精确数值表示的定量论域,C( Ex,En,He )是U 上的定性概念,若定量值x( x ∈U )是定性概念C 的一次随机实现,服从以Ex 为期望、 En'2为方差的高斯分布x~N( Ex,En'2);其中En'又是服从以Ex 为期望、He2为方差的高斯分布En'~N( En,He2)的一次随机实现;进而x 对C 的确定度满足:

则x 在论域U 上的分布称为高斯云[6]。
正向云发生器(CG)是从定性到定量的映射,根据定性概念的三个数字特征值( Ex,En,He ),得到定量数据集合的云模型,如图2所示。

图2 正向云发生器
已知云的三个数字特征( )Ex,En,He 的同时,加上了特定的x=x0条件,这时正向云发生器就被称为称为x 条件云发生器。 x0条件通过该发生器后,可以得到x0条件在此云模型上的确定度,即隶属度,如图3 所示。 x 条件云发生器是云模型极大判定法的基础。

图3 x条件发生器
2.3 逆向云发生器
逆向云发生器实现了从样本数据集合到得到定性概念的数字特征( Ex,En,He )的转换,是正向云发生器的逆运算[12]。常用算法有两种:1)有确定度的逆向云算法;2)无确定度的基于样本一阶绝对中心矩的算法。由于曲线拟合时无法确定数据的确定度,所以采用第二种算法,其具体步骤如下[13]。


3 算法描述
3.1 基于云变换的曲线拟合


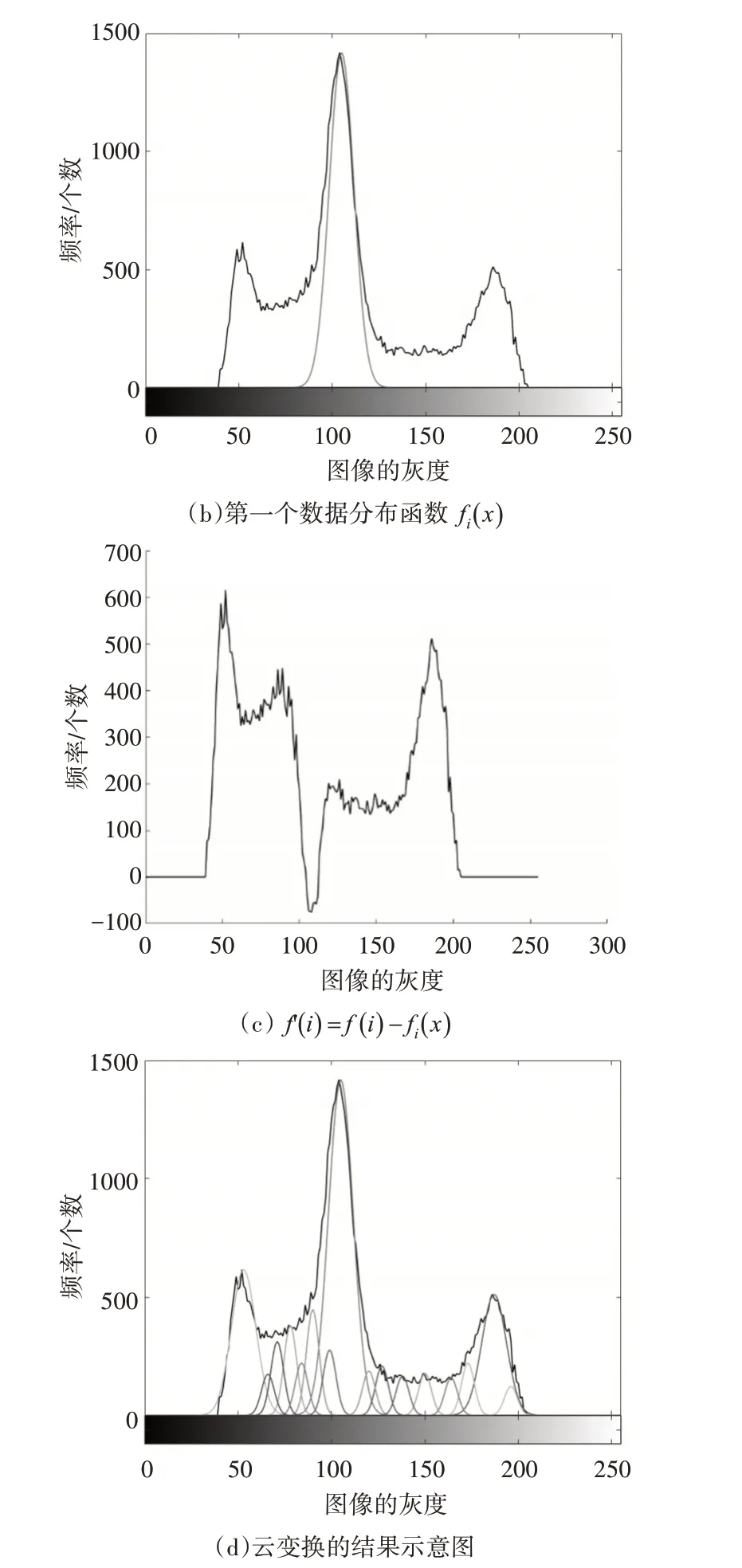
图4 基于云变换的曲线拟合
3.2 泛概念树的生成
将上述得到的一系列云模型作为所要求泛概念树的叶结点,通过对概念的逐级跃升,最终得到所需的泛概念树,具有更高层次的概念,其概念层次根据具体需求而定。本文采用“软或”的方法对概念进行提升,具体算法如下[15]。


将相邻的两个基本概念云模型进行软或操作后,如图5所示,生成了一个更高层次的概念。

图5 软或
利用软或的方法对作为叶结点的原子云模型不断进行概念提升,直至达到所需层次概念的个数要求,从而生成了所需的泛概念树,如图6、7所示。

图6 原子云模型

图7 跃升后的云
3.3 最优阈值分割
通过跃升后的云通过其相交部分可以确定出最优阈值,该阈值初步划分出了背景和目标这两个概念的云模型。再将图像的像素点作为x0条件分别通过阈值所划分出的背景与目标云模型的正向发生器,计算出该像素对于两个云模型的确定度,采用极大判别法将像素归到隶属度更高的部分,从而得到最终的分割结果,原理图如图8所示。

图8 极大判定法原理图
4 实验结果分析
本文运用了基于云模型的图像阈值分割方法,为了验证该方法分割的效果与稳定性,选择了两个常用的图像分割方法:双峰法和经典Ostu 算法,与本文所述方法进行对比。算法均已在Matlab 2016b 环境下实现,图像都是256 个灰度级(0 ~255)。对比结果如图9、10所示。

图9 细胞图像分割对比试验

图10 大米图像分割对比试验
本文选取细胞和大米图像进行分割,子粒多且模糊的边缘地带多,容易对比分割结果。通过实验数据的对比可以看到,本文所用算法是明显优于双峰法的,且略优于Ostu 经典算法,对于边缘物体边缘的模糊区域,云模型图像阈值分割有着更好的分割效果,且表现稳定。
从上面的实验分析可以看出,本文提出的基于云模型的图像阈值分割算法,在进行图像分割时是可行并且有效的,充分考虑了图像分割过程中存在的随机性与模糊性问题,对于解决图像处理过程中的不确定性等问题提供了一种新的解决思路。
5 结语
传统的图像阈值分割在选择最优阈值时,无法考虑到过程中可能存在的随机性与模糊性等问题,不具有处理不确定性图像的能力,同一种方法可能无法适用于各类图片的分割。为此,本文引入云模型来进行图像处理,降低各种不确定性因素对图像处理造成的影响,从而得到更好的图像分割效果。实验结果表明,本文所提出的方法能取得较好的分割效果,且具有较好的稳定性。降低了图像处理过程中随机性与模糊性对图像分割造成的影响。此外,如何快速对图片进行前期处理,是对本算法改进的一个方面。