主动后轮转向汽车与转矩分配协调控制研究
2020-10-10元加加赵沛竹
元加加,韩 伟,赵沛竹
(江西理工大学 机电工程学院,赣州 341000)
0 引言
转向系统作为汽车底盘重要组成部分,提高汽车转向特性对改善车辆操纵稳定性具有十分重要的作用,为此,研究人员提出了一些主动转向技术来实现上述目标。目前采用四轮转向系统来改善汽车操纵稳定性已成为了研究热点[1]。如Hirche等[2]运用模糊控制对主动后轮转向车辆的操纵稳定性进行研究,但制定模糊规则主要依赖设计者经验。杜峰等[3]基于前后反馈设计线性二次型主动后轮转向控制器,分析半正定矩阵中权重系数对控制器性能的影响。考虑路面附着变化对控制器的影响,谢宪毅等[4]引入变权重系数实现参数自适应调节,来提升最优控制器的性能及适用范围。Zhang等[5]为提高车辆的横摆稳定性,设计一种新型脉冲主动后轮转向系统,经仿真表明能显著提高车辆的横摆稳定性。邱浩等[6]设计主动后轮转向滑模控制器来跟踪理想横摆角速度,忽略了质心侧偏角也会受后轮转角影响。针对单一将横摆角速度作为控制变量,Wagner等[7]设计一种基于主动后轮转向的新型结构,来避免剧烈反向转向时车辆可能出现运动姿态恶化的状况。
为兼顾考虑两者对车辆状态的影响,基于线性车辆模型,以横摆角速度和质心侧偏角为控制变量,采用滑模控制理论设计后轮转向控制器及车辆稳定控制器,提出一种主动后轮转向与转矩分配协调控制来提升车辆的操纵稳定性。为使模型验证更具实际意义,在高/低附着路面分别进行闭环双移线仿真验证。
1 车辆横向动力学模型
为更好地研究独立驱动电动汽车的横向动力学,采用简化只有横向和横摆方向上运动的线性2自由度车辆模型。依据牛顿第二定律,建立其微分方程:
式中:m为整车质量;β为车辆质心侧偏角;ω为横摆角速度;v为质心纵向速度分量;Iz为绕质心的横摆转动惯量;cf,cr分别为前后轮等效侧偏刚度;a,b分别为质心至前后轴距离;δf,δr分别为汽车前后轮转角。
将前轮转向车辆稳态横摆角速度作为理想横摆角速度。由于车辆的横向加速度无法超过由地面所能提供的最大横向加速度,同时考虑到瞬态响应过程存在纯滞后特性的惯性环节,最终理想横摆角速度表达式[8]可表为:
式中:βd为汽车理想质心侧偏角,理想情况下可视为0。ωd为汽车理想横摆角速度,L=a+b为汽车轴距,K称为汽车稳定性因数,δf*为前轮转向车辆前轮转角,τ为惯性环节时间常数,经验范围一般为0.1s~0.25s。参考文献[9],本次试验取0.2s。
2 滑模变结构控制器设计
2.1 主动后轮转向控制器设计
为改善传统车辆的转向性能,设计以质心侧偏角滑模变结构控制率为核心的后轮转向控制器,通过控制后轮转角,使得车辆质心侧偏角趋近于理想质心侧偏角βd。构造滑模切换面为:

选用具有趋近速度快且到达切换面附近速度小特点的指数趋近率:

对式(3)求导,并联合式(1)、式(4)可得滑模控制律表达式:
2.2 车辆稳定性滑模控制器设计
1)定义横摆角速度控制的滑模切换面并求其导数:

对其求导,并联合式(1)、式(4),可得横摆角速度控制的附加横摆力矩为:
2)定义质心侧偏角控制的滑模切换面为:

同理,可得质心侧偏角控制的附加横摆力矩为:
为实现横摆角速度和质心侧偏角的同时跟踪,需按|β|的大小,对横摆角速度控制输出的ΔMω和质心侧偏角控制输出的ΔMβ进行加权协调。依据经验式(10)来确定ε,权值系数依次为ε,1-ε。
则控制器的最终输出控制率为:

为削弱或避免因滑模面切换引起的抖振现象,将式(5)、式(7)、式(9)中的符号函数sgn(S)用饱和函数Sat(S)代替,饱和函数表达式[11]为:
3 转矩分配
考虑到实际需求,选用常见的平均分配[12]控制方法来对车辆稳定性控制。定义前后轴间的转矩转移量为:
式中:Tdfr为前轴转矩转移量;Treq为驾驶员期望转矩;Fzf0、Fzf1分别为实时状态下前轴垂直载荷及静止状态下前轴垂直载荷;Fz为整车的垂直载荷。
车辆转弯时,对于左右两侧车轮纵向力分配十分重要,应给予外侧更多的纵向力。定义前后轴左右两侧车轮的转矩转移量为:
式中:Tdf、Tdr分别为前轴两侧车轮转矩转移量;Fz1、Fz10分别为实时状态及静止状态下前轴左前轮垂直载荷;Fz3、Fz30分别为实时状态及静止状态下后轴左后轮垂直载荷;Fzf、Fzr分别为实时状态下前后轴垂直载荷。
最终的转矩分配策略如下:
式中: Tij依次为左前轮、右前轮、左后轮及右后轮的驱动转矩;Treq为驾驶员期望转距;TM为附加横摆力矩ΔM传递到每个车轮的转矩。
4 仿真验证
选用七自由度整车模型为试验模型,搭建“人-车-路”闭环控制系统,如图1所示,用于对控制系统的闭环仿真研究。其中驾驶员模型采用郭孔辉院士提出的最优侧向加速度驾驶员模型[13],系统输入为前方道路信息f(t),输出为车辆的侧向位移,以此反映汽车轨迹跟踪的精度。
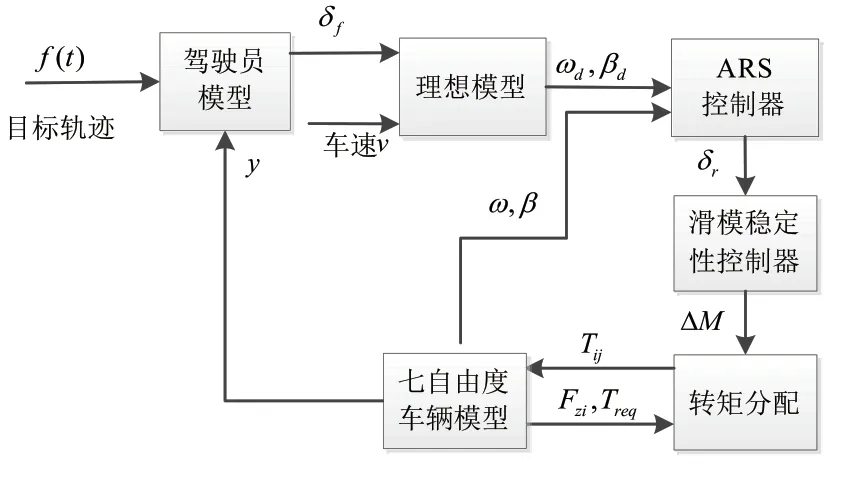
图1 “人-车-路”闭环控制系统
本次仿真试验中驾驶员模型神经反应滞后时间取Td=0.25s,操纵反应滞后时间为Th=0.1s,驾驶员预瞄时间选取Tp=0.75s,传动比i=17.5,采用的是2.5阶跟随,即跟随阶数α=0.5。试验工况选用双移线工况,并按ISO/TR3888规定设计标准紧急双移线试验道路,来模拟车辆在实际道路上进行超车或紧急避障情况。为凸显对比效果,同时进行了同条件下等结构参数的无控制前轮转向和前馈比例控制[14]四轮转向车辆仿真试验。为便于分析,特将滑模控制主动后轮转向与转矩协调控制简称“滑模控制”,类比依次可得“无控制”及“比例控制”。分别以恒定20m/s速度在高/低附着路面条件下进行仿真试验,车辆主要参数参考文献[15],相关参数取值为Iw=1.2(kg.m2),R=0.359m,B=1.6m,hg=0.59m,分别代表车轮转动惯量、车轮滚动半径、轴距及车辆质心高度,K1、K2、K4、K5为滑模控制参数,分别取值为0.2、0.2、10、15。
如图2(a)可以看出,当车辆以车速为行驶在高附着路面时,3种转向控制系统均能较好完成目标轨迹的跟踪。由图2(b)可知,三种控制方式的横摆角速度与理想值存在明显相位差,这是由于延时模块存在引起的。相比较之,滑模控制车辆横摆角速度跟踪效果最佳。从图2(c)可见,滑模控制车辆质心侧偏角变化近乎一条值为零的直线,其余控制方式车辆的质心侧偏角均有明显的变化。表明滑模控制车辆进行换道过程中车身姿态保持最好,完成对理想质心侧偏角的跟踪,提升了车辆的转向性能。在图2(d)质心侧偏角相图中,相对比可知,滑模控制车辆相图变化范围近似一点,其相图轨迹始终处于相平面较小地稳定范围,且最终收敛,说明滑模控制车辆具有较高的稳定性。
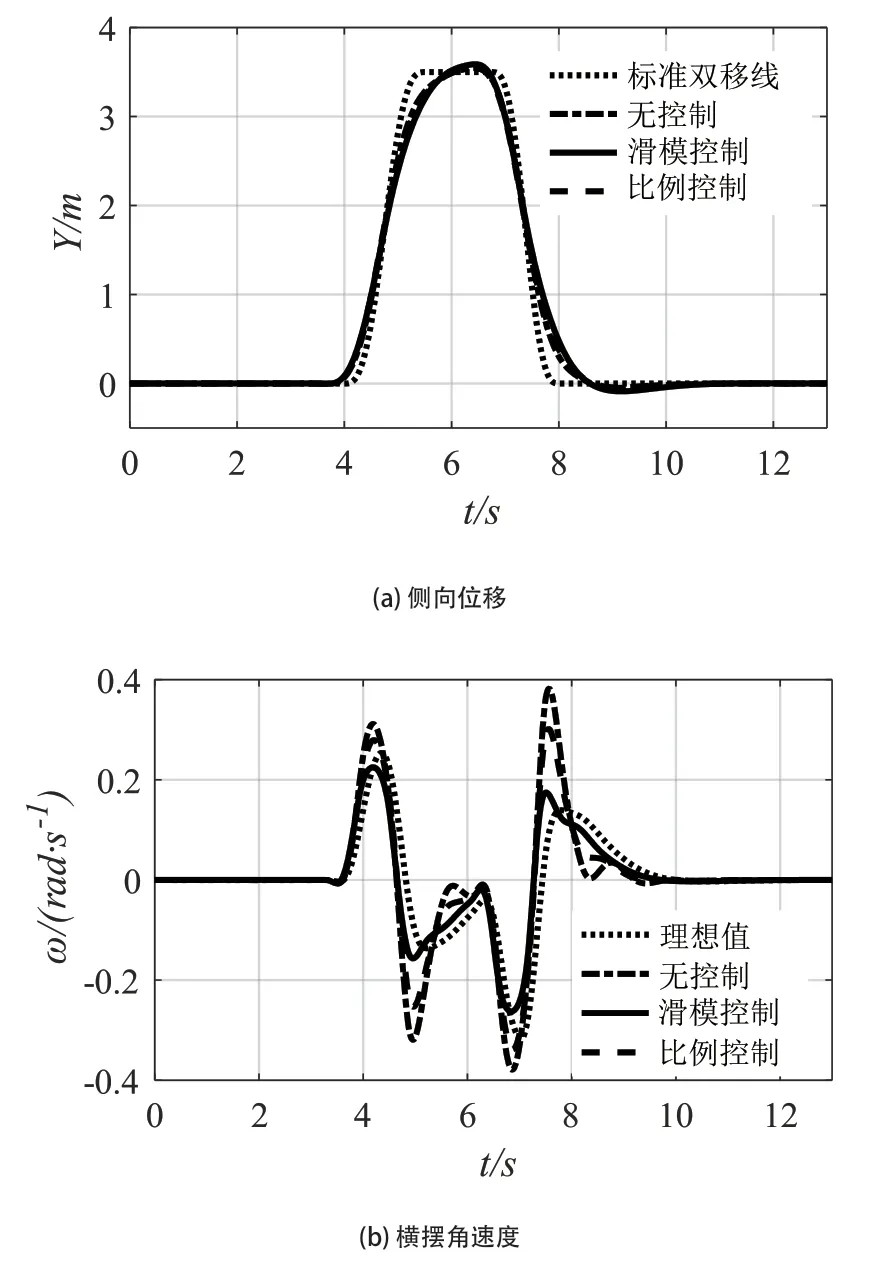
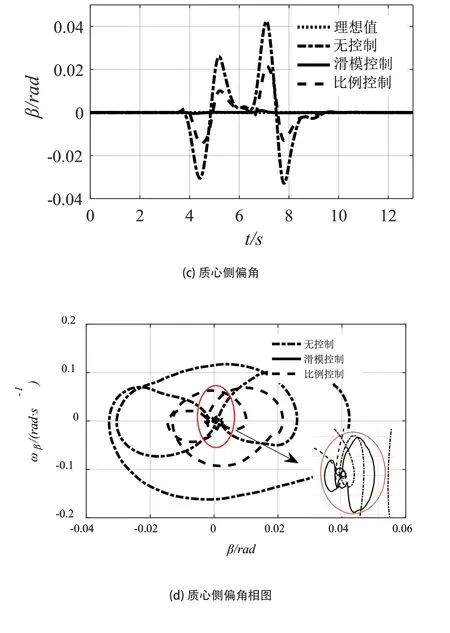
图2 高附路面闭环仿真结果
图3为车辆以车速为20m/s行驶在低附着路面时的仿真结果。图3(a)可看出,无控制车辆已出现失稳情况,有控制的车辆依旧能完成变道任务,且没有出现失稳情况。虽车辆轨迹跟踪误差较大,这是由于在极限工况下,车辆所能达到的系统增益受限及车辆本身的非线性造成的。两者对比,滑模控制车辆较快地调整过来,轨迹跟踪误差更小。由图3(b)可知,滑模控制车辆始终能较好跟踪理想横摆角速度,过渡较为平顺,转向比较平稳,而无控制车辆的横摆角速度轨迹发散。此外,从如图3(c)和图3(d)可知,无控制车辆的质心侧偏角轨迹发散,其相位曲线图最终也并未收敛,表明车辆最终处于失稳情况。有控制车辆质心侧偏角可维持在一定范围内,并最终收敛。滑模控制车辆的质心侧偏角近似于一条为零的直线,且其相位曲线轨迹范围最小,车辆始终处于稳定状态,可使得驾驶员获取较好的车辆转向特性。
5 结语
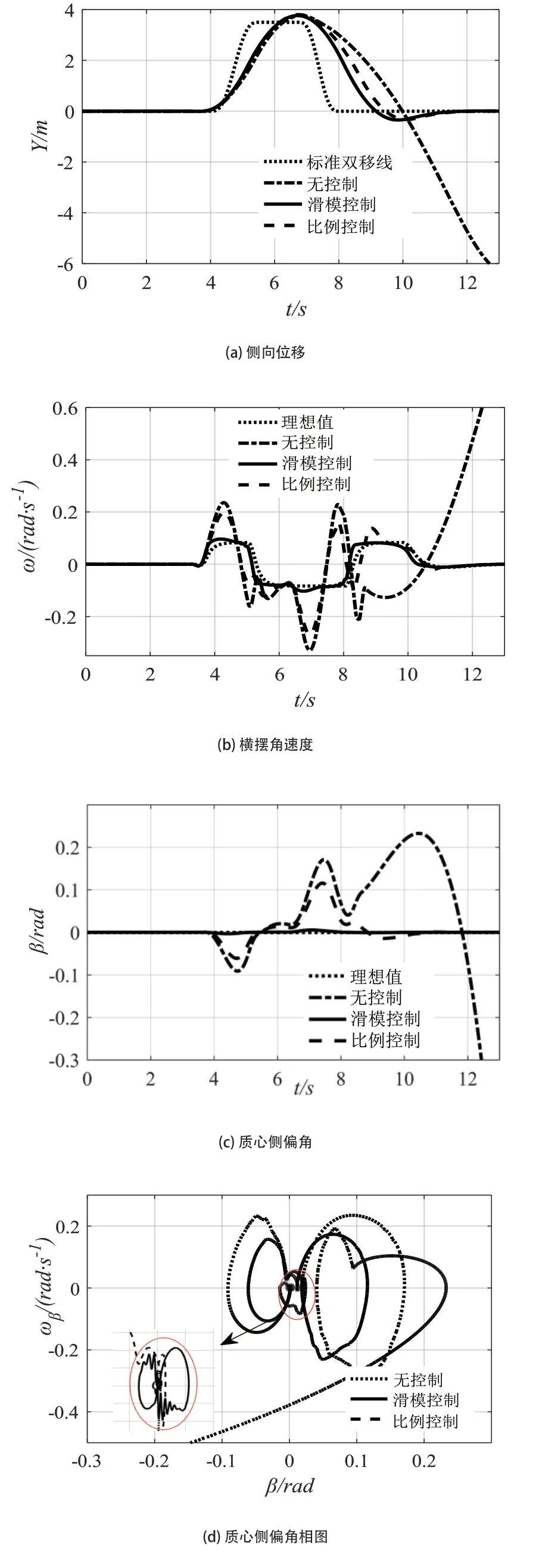
图3 低附路面闭环仿真结果
基于线性车辆模型利用滑模变结构设计后轮转向控制器和车辆稳定性控制器,借用Simulink完成驾驶员模型、非线性整车模型等模块的搭建,以及标准双移线试验道路轨迹的设计,构建“人-车-路”闭环控制系统。经试验仿真表明:所设计的主动后轮转向车辆在高/低附着路面均具有较好的转向姿态,且能较好完成轨迹跟踪。特别地,在低附着路面完成始终跟随理想质心侧偏角的同时,还具有更高的稳定性,对车辆的操纵稳定性具有较好的改善。
