基于纹理图像的农产品无损标识与真伪识别技术研究
2020-10-09向绪友周超贺艺刘学文李亮
向绪友 周超 贺艺 刘学文 李亮


摘 要:研究了一种基于产品表面纹理图像特征的产品真伪识别方法。使用具有定位、定向、定界和标定作用的标签联合产品本身天然纹理实现无损标识,一方面将官方纹理图像和用户纹理图像的特征值统一到同一计算空间,同时降低纹理图像拍摄条件,使应用场景更加丰富;另一方面利用分区将图像的纹理特征表达从一维扩展到多维,通过突出局部特征提高真伪识别准确率。
关键词:纹理图像;纹理防伪;纹理分类;局部特征描述;信息技术;农产品
中图分类号:TP391.4文献标识码:A文章编号:1006-060X(2020)08-0093-04
Abstract: A product authenticity recognition method based on product surface texture image features is studied. The label with the functions of location, orientation, delimitation and calibration is used to realize the nondestructive identification by combining the natural texture of the product, on the one hand, it unifies the eigenvalue calculation of official texture image and user texture image into the same computing space, at the same time, it reduces the shooting conditions of texture image and makes the application scene richer; the texture feature expression of texture image is extended from one dimension to multi dimension by using partition, and the recognition accuracy is improved by highlighting local features.
Key words: texture image; texture anti-counterfeiting; texture classification; local feature description; information technology; agricultural products
基于標识的产品真伪识别技术包括材料防伪、油墨防伪、纹理防伪和RFID防伪等技术,这些技术在特定的应用中都发挥了有效的防伪作用。当前,在农产品流通领域,基于无损标识限制条件,纹理防伪[1]仍是研究热点。纹理防伪具有难伪造、构造成本较低和相对可靠等优点[2]。纹理防伪以纹理识别为基础,常通过判定指定区域是否存在预期的纹理特征实现[3],主要内容包括标识标签构造、识别区域定位、特征生成和特征匹配等。研究重点在于构造标识标签以及所述标识标签的集成应用方法,为具有独特纹理特征的农产品机器识别提供解决方案。
在标识标签构造方面,常用的方法有2类,一是基于结构纹理[4]构造,二是基于天然纹理[5-6]构造。前者利用具有唯一性纹理特征的材料,采用特定的排列组合方法生成一组代码作为产品的标签,真伪识别过程需要人工参与,不支持机器识别,存在操作复杂、使用条件过于受限和识别结果人为因素影响大等可用性问题。后者基于产品本身的纹理图像构造标识标签,但在构造设计上没有充分考虑纹理图像拍摄视角、拍摄距离(缩放)对纹理表观特征的影响[7-8],也没有提供消除影响的方法,虽然支持机器识别,但因拍摄要求过于苛刻导致识别准确率较低,应用体验效果较差。
鉴于此,提出一种基于表面纹理图像特征的防伪技术,用于部分固态性农产品在销售环节中的无损标识和在线真伪识别。
1 基本原理
使用具有定位、定向、定界和标定作用的标签,将官方纹理图像和用户纹理图像的特征值计算统一到同一计算空间,屏蔽因纹理图像拍摄视角和拍摄距离不同对纹理表观特征的影响。官方纹理图像由卖方生成,内容包括标签和产品表面纹理图案,以标签为参考点定义识别区域,将识别区域划分成多个分区(称为基准分区),计算每个基准分区的纹理图像特征值得到一组基准分区纹理图像特征值。用户纹理图像由买方生成,利用标签特征信息进行透视变换,用同样的方法将图像划分成多个分区(称为相似分区),建立基准分区与相似分区间的对应关系,计算每个相似分区的纹理图像特征值得到一组相似分区纹理图像特征值,计算两组特征值的匹配率,当匹配率超过指定的阈值判定为真品。通过改变相似分区的位置反复计算和比较优化提高识别准确率,所述阀值和位置变化范围在实际应用中都是配置参数。该技术主要包括3个内容:标签与标签使用方法、分区与分区特征值计算方法和特征值匹配方法。
2 具体实现
假定在应用范围内存在多种纹理类别,如Tux1、Tux2、Tux3和Tux4等,且假定每种类型纹理图像存在4个特征值计算算法,分别记为Alg1,Alg2,Alg3和Alg4。
2.1 标识标签
2.1.1 结构设计 标签组件和结构如图1所示,长方形,由定位器(110)、二维码(120)、边界器(140)和定向器(130)组成。定位器由4个定位点组成,分别为图标(111)、图标(112)、图标(113)和图标(114)。二维码(120)携带标签序列号。定向器(130)所指方向是垂直标签下边缘线向上,其起点是图标(113),终点是图标(114)。边界器(140)为标签的四条边线。
2.1.2 标签图像采集与信息处理用成像设备拍摄标签的正俯视图生成标准标签图像。拍摄视距bL为120 mm,成像精度bD不小于350 DPI。
在图2所示的图标(114)位于原点的像素座标系中,按下列类C语言伪代码计算各定位点座标:
for(i = 0; i < 标签图像宽度; i++) {
n = 直线(U = i)在图中存在相交点个数,
if(4 == n) {
t = U轴方向第二个相交点的 v值;
b = U轴方向第三个相交点的 v值;
退出循環;
}
}
for(i = 0; i <标签图像高度; i++) {
n = 直线(V = i)在图中存在相交点个数,
if(4 == n) {
l = V轴方向第二个相交点的 v值;
r = V轴方向第三个相交点的 v值;
退出循环;
}
}
上述计算过程得到图标(111)的中心点座标为(r, t),记为bP1;图标(112)的中心点座标为(r, b),记为bP2;图标(113)的中心点座标为(l, b),记为bP3;图标(114)的座标为(l, t),记为bP4。
bP1、bP2、bP3和bP4是标准透视变换目标图像特征点座标,记为(bp1,bP2,bP3,bP4)。计算出定位点(111)与(112)间、(112)与(113)间、(113)与(114)间和(114)与(111)间的距离。计算出定向图形(120)所指方向,实施中,方向为90度,表示垂直于标准标签图像(100)下边缘指向上边缘。在具体应用中,用二维码识读方法提取二维码(130)所含信息,包括真伪识别服务器访问地址。
2.2 官方纹理图像生成与处理
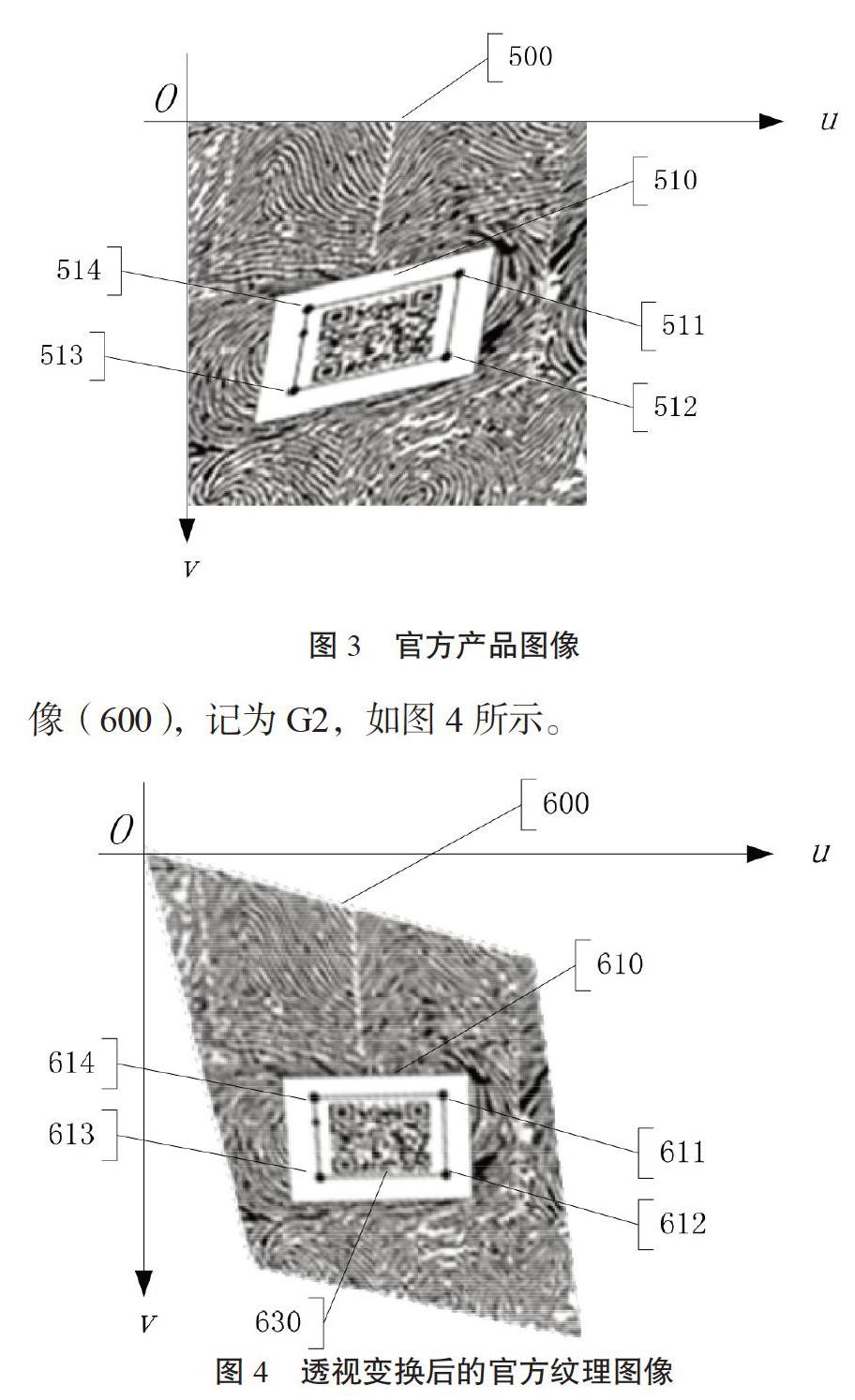
2.2.1 图像采集 用成像设备拍摄农产品识别区得到产品图像(500),记为G1,如图3所示。G1中点(511)、点(512)、点(513)和点(514)在图3所示的座标系中像素座标(u, v)分别记为pP1,pP2,pP3和pP4。采用图像处理方法,计算pP1,pP2,pP3和pP4的值。
2.2.2 特征值计算 基于多分区的纹理图像特征值:
设pP4的值为(u1,v1),生成,
bP1' = bP1 + (u1,v1)
bP2' = bP2 + (u1,v1)
bP3' = bP3 + (u1,v1)
bP4' = bP4 + (u1,v1)
上述加运算得到一个新座标,其结果的u分量是右边两个u分量之和,v分量是右边两个v分量之和。用(pP1,pP2,pP3,pP4)作透视变换的源特征点,(bP1',bP2',bP3',bP4')作目标特征点,生成图像透视变换矩陈M;用M对G1做图像透视变换生成官方纹理图像(600),记为G2,如图4所示。
扫描G2中的二维码(630),获得标签序列号(如,SN0321),记为Psn,作为产品序列号。用Psn作主健,存储G2、G1,pP1、pP2、pP3和pP4。用G2中心点为参考点,用经纬线分割G2生成多个分区,经纬线之间的间隔距离根据实际应用需要设置,如,将经线间和纬线间的间隔距离都设置10 mm。
采用上述分割方法后产生多个分区,如图5所示。图5中存在9个分区,分别为分区640、分区641、分区642、分区643、分区644、分区645、分区646、分区647和分区648。为了陈述方便,官方纹理图像G2中的分区统称为iR,所有iR组合在一起构成G2的分区组。
基于图像分析处理,从分区组中选出不与标签(610)相交的分区。就G2而言,存在7个符合条件的分区,分别为分区640、分区641、分区642、分区645、分区646、分区647和分区648。所述的7个分区为G2的有效分区,组合在一起构成G2的有效分区组。
采用“全选”策略将全部有效分区作为认证分区,就G2而言,共7个认证分区,组合在一起构成G2的认证分区组,记为{iR}。对{iR}中的所有iR,执行以下流程。
(1)计算关联于iR的(d,a),记为R_id,其中,d是iR中心与标签(610)之间的距离,a是定向线(620)与有向直线(650)之间的夹角(620按顺时针方向旋转与650重合产生的夹角θ)。
(2)设置iR纹理特征值分类类型(记为R_type)。实现中简单地设置R_type为Tux3;实际应用中,由机器根据纹理特点自动选择或通过UI人工选择。
(3)设置iR纹理特征值计算算法(记为R_agl)。由于Tux3对应的算法为Agl3,设置R_agl为Alg3。
(4)用算法Alg3计算iR的特征值(记为R_value)。
(5)将R_id、R_type、R_agl和R_value存储在R_Object中。
所有iR处理后,用G2T管理其R_Object,用Psn索引将G2T存储在真伪识别服务器中。
2.3 用户纹理图像生成与处理
2.3.1 图像采集用成像设备拍摄待认证产品的用户产品图像(700),记为G3,如图6所示。 G3中,定位点(711)、定位点(712)、定位点(713)和定位点(714)在图6所示的座标系中像素座标(u, v)分别为uP1、uP2、uP3和uP4,利用图像分析处理方法得到uP1、uP2、uP3和uP4的值,这些值用于后续的透视变换。
2.3.2 特征值计算与真伪认别 对上述待认证产品的用户产品图像G3进行透视变换生成用户纹理图像。
设uP4的值为(u1,v1),生成,
bP1' = bP1 + (u1,v1)
bP2' = bP2 + (u1,v1)
bP3' = bP3 + (u1,v1)
bP4' = bP4 + (u1,v1)
上述加运算得到1个新座标,其结果的u分量是右边两个u分量之和,v分量是右边两个v分量之和。用(uP1,uP2,uP3,uP4)作透視变换的源特征点,(bP1',bP2',bP3',bP4')作目标特征点,生成图像透视变换矩陈M;用M对G3做图像透视变换生成用户纹理图像(800),记为G4,如图7所示。
扫描用户纹理图像G4中的二维码(830)得到待鉴定产品序列号(一个Psn值),用该序列号对真伪识别服务器进行联机查询得到关联于该产品的G2T。G2T在2.2.2中生成。从G2T中取出认证分区组,记为{iR}。
按2.2.2所述相同方法对G4分区得到受检分区组,记为{uR}。对{iR}中每个iR,依次用下列方法检查iR是否被G4匹配:
(1)对给定的iR,其R_id 为 (d1,a1),查询{uR}是否存在一个分区uR,其R_id 为(d2,a2),且d1、a1、d2和a2满足条件:
|d1- d2| <= ΔX,|a1-a2| <= ΔY ,其中, ΔX和ΔY是预定值,当所述uR存在时,称uR为iR的对等分区。当所述uR不存在,则认为iR不被G4匹配。
(2)设iR在G4中的对等分区为uR,用iR中指定的算法(R_agl),计算uR的特征值,比较iR和uR的特征值,如果相等表示iR被匹配。
(3)设iR在G4中的对等分区为uR,uR在G4的范围为(l,t,w,h),其中,l和t是uR左上角的像素座标,w和h是uR的宽度和高度。在保持w和h不变情况下,用步长Δl和Δt修改l和t,得到uR的相似分区,记为uR',uR'的范围为(l+Δl,t+Δt,w,h),用iR中指定的算法(R_agl),计算uR的特征值,比较iR和uR的特征值,如果相等表示iR被匹配。重复此过程,直到iR被匹配为止或达到最大重复数。
当{iR}中被G4匹配的分区数与{iR}中的分区总数的比率大于98或某个指定值时,判定待认证产品为官方合法产品。
3 结 语
基于表面纹理图像特征的防伪技术适用于所有表面具有独特的纹理,且该纹理在产品范围内具有唯一性的产品;可程序化实现产品的自动无损标记与防伪认证,使用方便。研究中对表面纹理图像多分区计算特征值和相似分区匹配特征值,使特征值更加全面、精准体现纹理图像的差异性,有效减少误判,有利于提高计算机程序化产品真伪识别认证效率和准确率,具有广阔的应用前景。
参考文献:
[1] 陈永常. 纹理防伪技术的原理与特点[J]. 印刷世界,2006(3):30-31.
[2] 联 信.纹理防伪技术原理及优势透视[J].中国防伪报道,2005(11):26-28.
[3] 李雨佳,李京兵. 基于变换域的纹理防伪标签自动鉴别算法[J]. 计算机仿真,2014. 31(12):265-269.
[4] 陈明发. 结构纹理防伪方法[P]. 中国,99801139.8,2000.
[5] 刘承香,林武璋,胡学娟,等. 基于纹理识别的图像鉴伪技术研究[J]. 激光与红外, 2009,39(6):685-687.
[6] 陈明发,苏文华,简镇明. 拍摄天然特征照片之商品物联网防伪溯源系统[P]. 中国,CN202795434U,2013.
[7] 刘 丽,赵凌君,郭承玉,等. 图像纹理分类方法研究进展与展望[J]. 自动化学报,2018,44(4):584-603.
[8] 郑肇葆. 与旋转、尺度无关的影像纹理的MRF参数估计[J]. 测绘学报,1996,25(3)190-193.
(责任编辑:成 平)
