基于风险指数的CTCS-3级列控系统设备剩余寿命预测
2020-09-29王瑞峰姚军娟
王瑞峰,姚军娟
(兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070)
列控系统作为铁路信号的核心部分,对其设备的剩余寿命进行预测,可提前制定相应的维修及备件策略,保证行车安全。
近年来,对于列控系统设备的研究主要集中在可靠性、故障诊断和维修等方面。文献[1]从可靠性的角度,分析了车载设备在不同故障情况下的弹复能力,并提出相应维修策略。文献[2]从可靠性及可用性的角度,对列控中心进行了评估,找出系统薄弱环节以提高维护管理水平。文献[3]从故障识别的角度,对列控车载设备进行了故障诊断和分类。文献[4]从时变可靠度的角度,确定列控系统的维修周期。不难看出,基于可靠性和故障诊断的列控系统设备的维修还存在一定的局限性。然而在航天和航空领域,对设备状态评估和剩余寿命预测方面进行了大量研究[5-7]。而在铁路领域,对列控系统设备的状态评估和剩余寿命预测方面的研究相对较少。
本文建立了基于风险指数的CTCS-3级列控系统设备剩余寿命预测模型,包括基于模糊层次分析法和实验室决策法(AHP-DEMATEL)的风险指数模型和基于不确定理论的剩余寿命预测模型。通过对CTCS-3级列控系统设备风险状态的评估,建立了设备风险状态随运行时间变化的规律,并在此基础上,实现对设备寿命及剩余寿命的预测。
1 CTCS-3级列控系统设备风险指数模型
1.1 设备风险状态等级划分
基于文献[8]中描述的铁路信号设备状态信息,将CTCS-3级列控系统设备风险状态量化,采用风险指数(Risk Index,RI)来描述设备的风险状态。规定RI的取值范围为0~100。CTCS-3级列控系统设备风险状态等级划分见表1。
1.2 构建设备风险指数模型
影响CTCS-3级列控系统设备安全的因素众多,对设备状态的影响具有模糊性和随机性,因此采用基于模糊AHP-DEMATEL法的风险指数模型。
1.2.1 确定指标体系
综合考虑影响CTCS-3级列控系统设备安全的因素,以历史工况、基本状况和运行工况3个方面建立其风险状态评估指标体系,见图1。其中:历史工况包括检修质量和故障频率,反映了设备当前的实际状态;基本状况包括性能参数和产品质量史,反映了设备安全运行相关的理想状态;运行工况包括运行状态、运行环境和运行时间,反映了设备运行相关的实时状态。图1中,U层为目标层,A层为主准则层,B层为次准则层。

表1 CTCS-3级列控系统风险状态等级
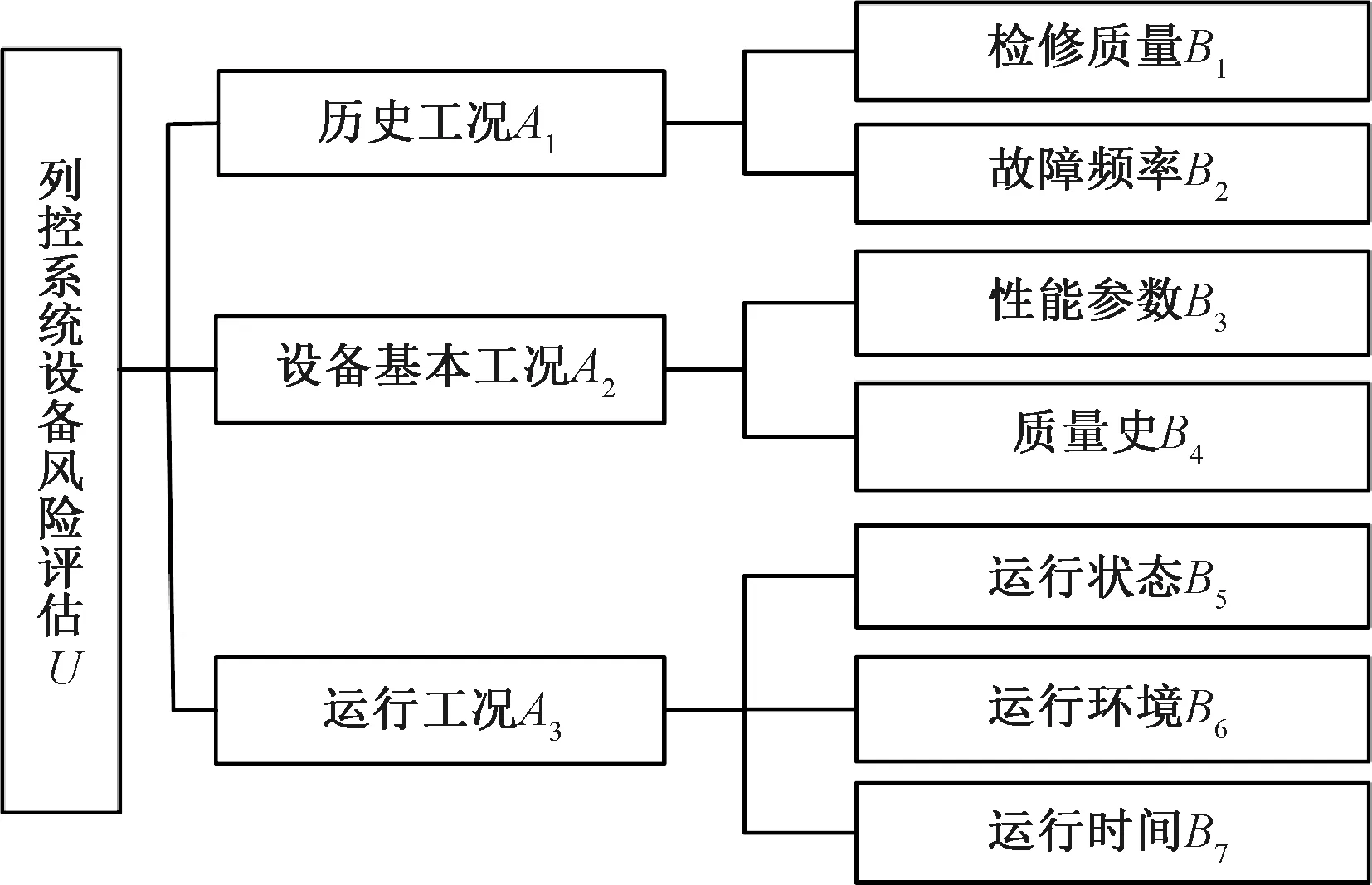
图1 风险状态评估指标体系
1.2.2 计算指标综合权重
采用AHP-DEMATEL法确定各指标综合权重zi。由于AHP法[9]未考虑因素之间的相互影响关系,而CTCS-3级列控系统设备风险因素涉及面较广,很难保证各因素的独立性,故引入DEMATEL法[10],综合考虑各指标之间影响程度,以克服专家主观性。具体计算流程如下:
(1)采用AHP法计算指标初始权重。
(2)采用DEMATEL法计算指标中心度。
(3)计算指标综合权重,即指标初始权重与中心度之积。
1.2.3 设备风险状态评估
采用模糊综合评价法对CTCS-3级列控系统设备进行风险状态评估,评估结果即为风险指数RI。具体计算过程如下:
Step1确定隶属度矩阵R
R=(rij)i×4。rij为评估集U中第i指标对评价集V(风险低Ⅰ、风险较低Ⅱ、风险较高Ⅲ、风险高Ⅳ)中第j(j=1,2,3,4)个元素的隶属度。隶属度rij=mij/M,M为专家总人数,mij表示有m个专家对第i指标的评语为Vj。
Step2确定模糊综合评判矩阵B
CTCS-3级列控系统设备风险状态评估的模糊综合评判矩阵为
(1)
Step3确定风险状态评估结果RI
采用模糊向量单值化法求CTCS-3级列控系统设备风险指数为
RI=B·C
(2)
式中:C为CTCS-3级列控系统设备风险状态评估等级分值,它与风险状态评估等级之间的关系见表2。
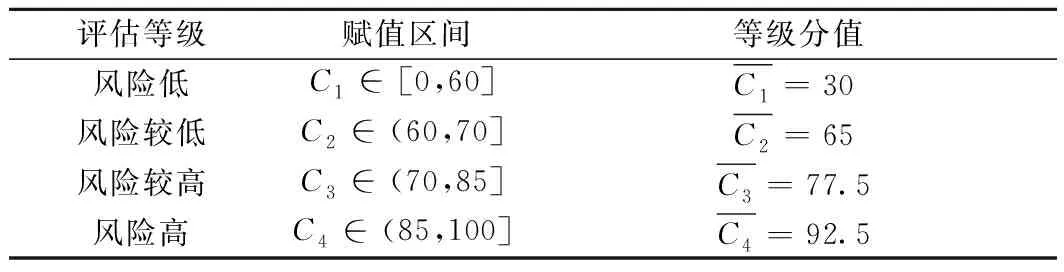
表2 风险状态评估等级与等级分值对照
2 CTCS-3级列控系统设备剩余寿命预测模型
2.1 建立风险指数RI的随机模糊分布函数和曲线图
CTCS-3级列控系统设备,随着运行时间的增加,设备的退化水平不断增大,从而导致设备失效的风险也越大。由于组成列控系统的各功能模块失效分布一般服从指数分布[11],因此建立基于指数分布的CTCS-3级列控系统设备风险指数的分布函数为
RI(t)=a0+beλt
(3)
式中:a0、b和λ为常数。
根据文献[12]描绘的列控系统风险曲线图,以及式(3)建立的风险指数分布函数,建立CTCS-3级列控系统设备风险指数曲线,见图2。
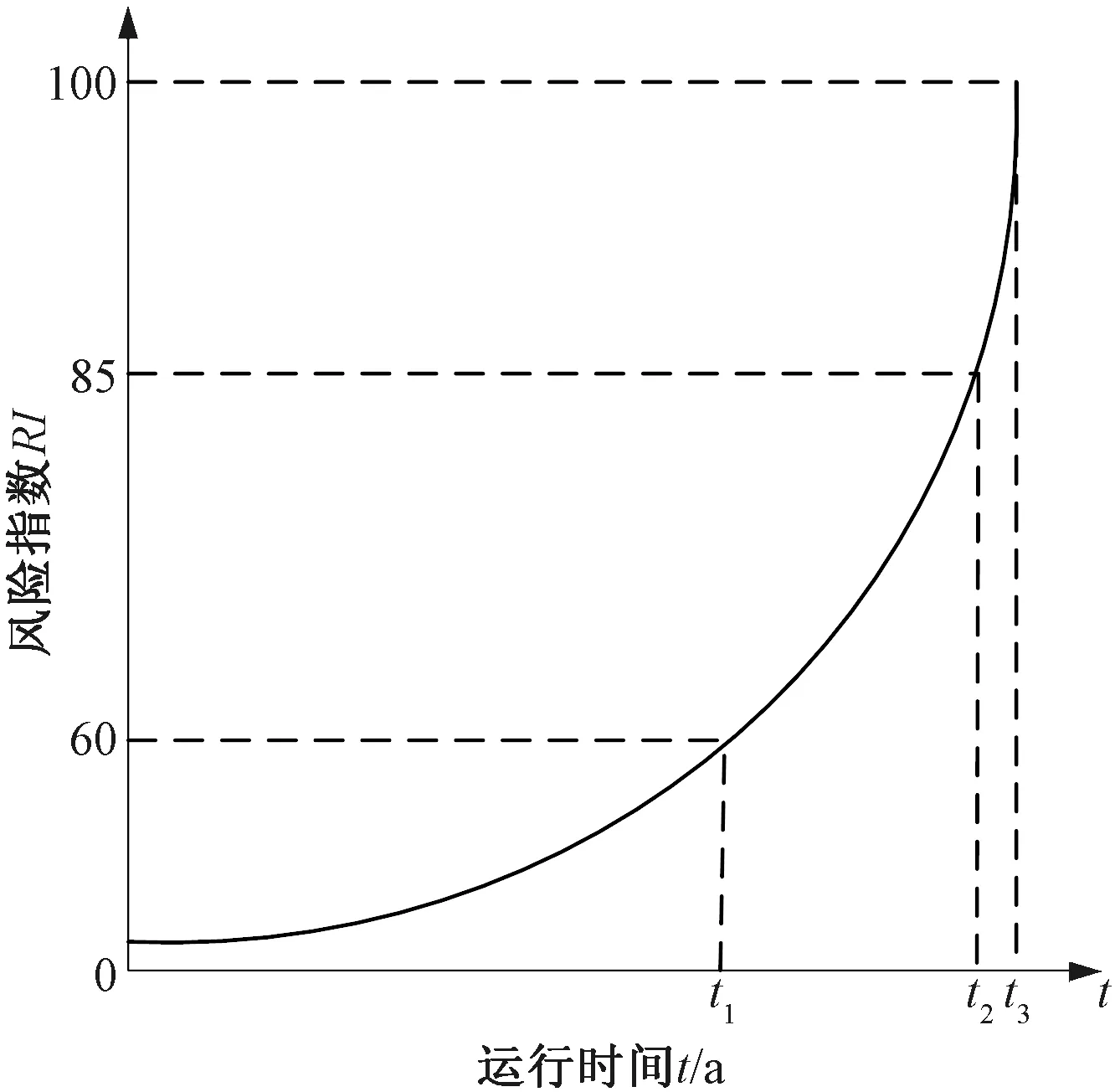
图2 CTCS-3级列控系统设备风险指数曲线
由图2可知,CTCS-3级列控系统设备风险指数随运行时间t呈指数规律上升。当RI≤60时,设备处于正常状态,风险较小;当60 采用三角模糊变量an=(a0,a1,a2)将风险指数分布函数中的参数a0模糊化,建立CTCS-3级列控系统设备风险指数RI的随机模糊分布函数为 RI(t)=an+beλtan=(a0,a1,a2) (4) 式中:t为CTCS-3级列控系统设备运行年数。 根据上述CTCS-3级列控系统设备的风险指数对其剩余寿命进行预测。CTCS-3级列控系统设备的寿命是指设备在失效之前的最大运行时间,即 T=max{t|RI(t)≤RImax} (5) 式中:RImax为CTCS-3级列控系统设备所允许的最大风险指数;T为设备的寿命。 由图2知,b>0,λ>0,将式(4)代入式(5)可推导出CTCS-3级列控系统设备的运行时间t满足 (6) 由此,基于不确定性理论[13-15],建立CTCS-3级列控系统设备最大机会约束下剩余寿命预测模型为 (7) 式中:α、β为置信水平;Tr为CTCS-3级列控系统设备剩余寿命。 由于CTCS-3级列控系统设备剩余寿命预测模型包含不确定函数,很难用传统方法求解,因此采用随机模糊模拟技术求解上述建立的模型。具体实现步骤如下: Step2假设μn=(2Mcr{an})∩1。其中:μn为模糊变量an的隶属度;n=1,2,…,N;N为随机模糊模拟次数。 Step3对于每个模糊变量an,采用随机模糊模拟技术求出满足Cr{f(an)≥r}≥β的期望目标可信度,求解公式为 (8) 式中:f(an)为模糊变量an的可测函数;r为任意实数。 Step4求解满足L(r)≥α时的r的最大值rmax。rmax即为CTCS-3级列控系统设备的寿命T,用T减去设备已运行年限t,最终得到设备的剩余寿命Tr。 CTCS-3级列控系统设备剩余寿命预测模型求解流程见图3。 图3 剩余寿命预测模型求解流程 列车超速防护系统(ATP)是列车运行控制系统的核心,具有保证列车安全运行的重要功能。车载ATP主机作为ATP系统的重要组成部分,主要功能是生成速度监控曲线,以防列车超速行驶[16]。鉴于车载ATP主机在保障行车安全方面的重要作用,结合上述CTCS-3级列控系统风险指数模型和剩余寿命预测模型,对某铁路局一台运行9 a的CTCS-3级列控系统车载ATP主机进行剩余寿命预测。 3.1.1 采用AHP法计算初始权重 根据列控设备动态监测系统(DMS)对CTCS-3级列控系统设备状态的实时监测数据和专家经验,采用传统1~9标度法构造车载ATP主机风险状态评估指标的判断矩阵。传统1~9标度法见表3,构造的判断矩阵见表4~表7。 表3 传统1~9标度法 表4 判断矩阵U -A 表5 判断矩阵A1 -B 表6 判断矩阵A2 -B 表7 判断矩阵A3 -B (1)由表4~表7求得车载ATP主机风险状态评估指标的初始权重为 wU=(0.154,0.641,0.206) wA1=(0.889,0.111) wA2=(0.875,0.125) wA3=(0.068,0.685,0.247) (2)为了验证上述判断矩阵的构建是否合理,需要对其进行一致性检验,检验公式为 (9) (10) 式中:CR为判断矩阵随机一致性比率,当CR<0.1,说明判断矩阵满足一致性要求,构建合理;CI为一致性检验标度;λmax为上述判断矩阵的最大特征值;k为判断矩阵的维数;RI为随机一致性指标,见表8。 表8 随机一致性指标 取RI=1.32,计算结果为 λmaxU=3.167,CIU=0.0835,CRU=0.063<0.1 λmaxA1=1.999,CIA1=-0.001,CRA1=-0.001 λmaxA2=2,CIA2=0,CRA2=0<0.1 λmaxA3=3.250,CIA3=0.125,CRA3=0.095<0.1 由此可知,上述判断矩阵满足一致性,其构建合理。 (3)车载ATP主机风险状态评估B层各指标对U层总排序见表9。 表9 B层各指标对U层总排序 对总排序结果进行一致性检验,检验公式为 (11) 可得 0.019<0.1 根据计算结果可知,综合排序满足一致性检验,即车载ATP主机风险状态评估各指标权重分配合理。 3.1.2 计算综合权重 (1)直接影响矩阵 用0~3标度来表示车载ATP主机风险状态评估各指标之间的影响强度,其中0、1、2、3分别对应“没有影响”“有影响”“较大影响”“较强影响”。通过专家打分,确定不同指标间的影响程度,得出直接影响矩阵,见表10。 表10 直接影响矩阵 (2)规范化直接影响矩阵 对直接影响矩阵进行规范化处理,得到如表11所示的规范化直接影响矩阵,计算公式为 (12) (3)综合影响矩阵 由式(13)求得综合影响矩阵,结果见表12。 F=B(I-B)-1=(tij)7×7 (13) 表11 规范化直接影响矩阵 表12 综合影响矩阵 (4)综合权重 中心度hi综合反映了各指标对车载ATP主机风险状态评估的重要性,计算公式为 (14) (15) hi=fi+gi (16) 车载ATP主机风险状态评估指标的综合权重zi为 (17) 综合权重计算结果见表13。 表13 综合权重 通过计算风险低、风险较低、风险较高和风险高共4个评语集V内专家人数m与专家总人数M(M=10)的比例,构建了底层指标的隶属度,从而得到车载ATP主机各指标的隶属度矩阵,见表14。 表14 车载ATP主机各指标隶属度 由式(1)得,车载ATP主机风险状态评估向量为 B=(0.1328,0.2125,0.3619,0.2918) 根据式(2),车载ATP主机的风险指数为 RI=0.133×30+0.213×65+0.362×77.5+ 0.292×92.5=72.90 即该台车载ATP主机的风险指数RI为72.9,约为73,其风险状态处于Ⅲ级,风险较高,设备发生故障的可能性较大,需加强监测。采用同样的方法,得到车载ATP主机历年的风险指数,见表15。 表15 车载ATP主机历年的风险指数 采用Matlab拟合出车载ATP主机的风险指数曲线,见图4,风险指数的分布函数为 RI(t)=-8.237+16.57e0.175 6t (18) 图4 车载ATP主机的风险指数曲线 由于CTCS-3级列控系统设备风险指数的分布函数RI(t)是关于参数an的模糊随机分布,则车载ATP主机风险指数的模糊随机分布函数为 RI(t)=an+16.57e0.175 6t (19) 将车载ATP主机的风险指数分布函数式(19)代入式(7)得 当β=RImax=92.5,α=0.95时,取an=(-10.132,-8.237 ,-6.215 ),采用随机模糊模拟技术求解式(20),得车载ATP主机的寿命为T=10.28 a,则其剩余寿命为Tr=10.28-9=1.28 a。 (1)本文建立了基于模糊AHP-DEMATEL法的CTCS-3级列控系统设备风险指数模型。该模型能够较准确地反映当前设备风险状态水平的高低。 (2)以风险指数为基础,建立了基于不确定理论的CTCS-3级列控系统设备剩余寿命预测模型。该模型不仅反映了CTCS-3级列控系统设备风险状态随运行时间的变化规律,实现对设备风险状态的实时追踪,还较准确地预测了设备寿命以及剩余寿命。本文以一台运行了9年的车载ATP主机为例,验证了该方法的可行性,符合车载ATP主机现场每十年更新的要求[17]。 (3)基于风险指数的CTCS-3级列控系统设备剩余寿命预测模型,可有效掌握设备的实时风险状态,实现设备的优先修护以及节约维修成本。2.2 建立基于不确定理论的剩余寿命预测模型
2.3 求解设备剩余寿命预测模型

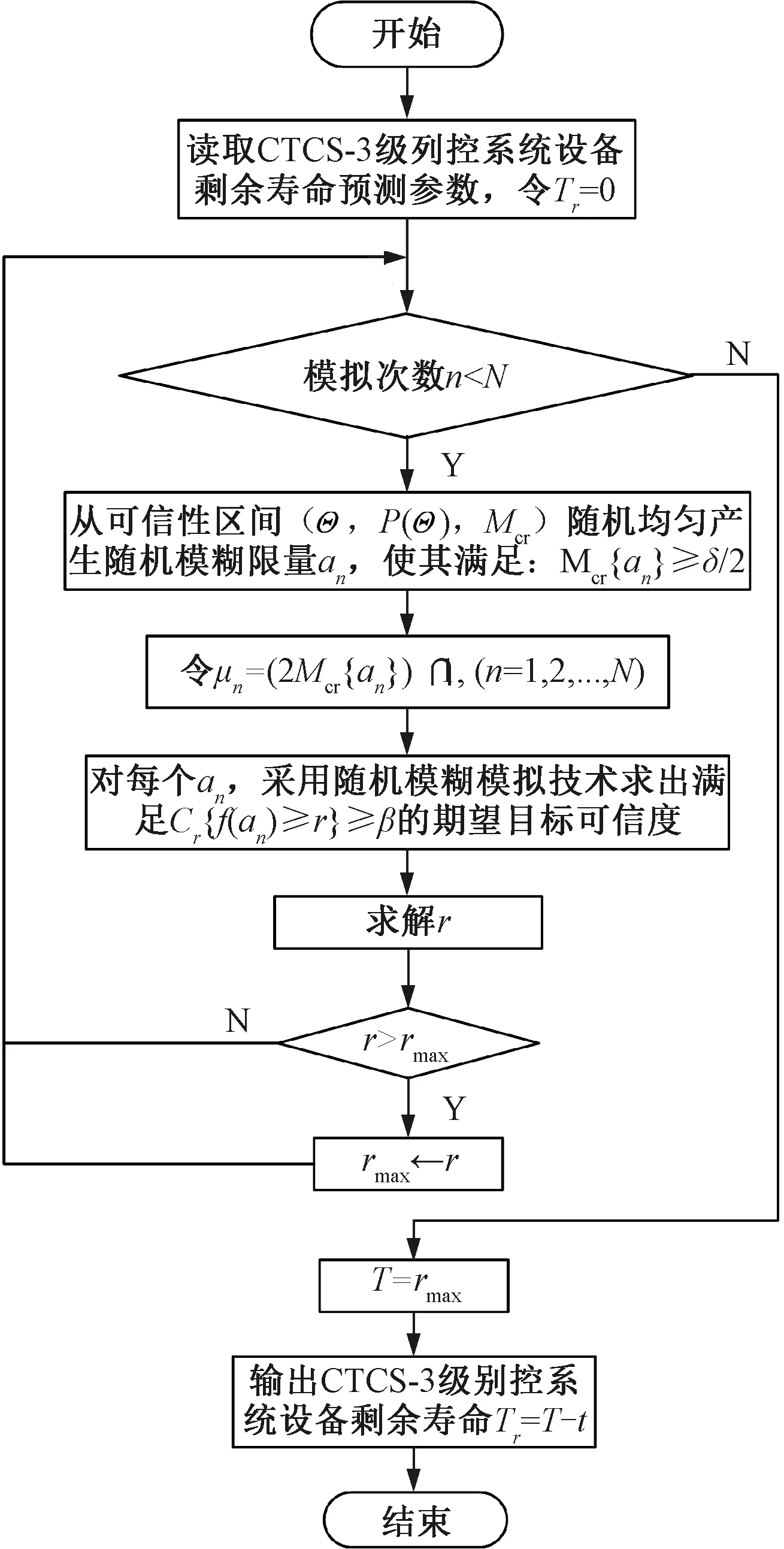
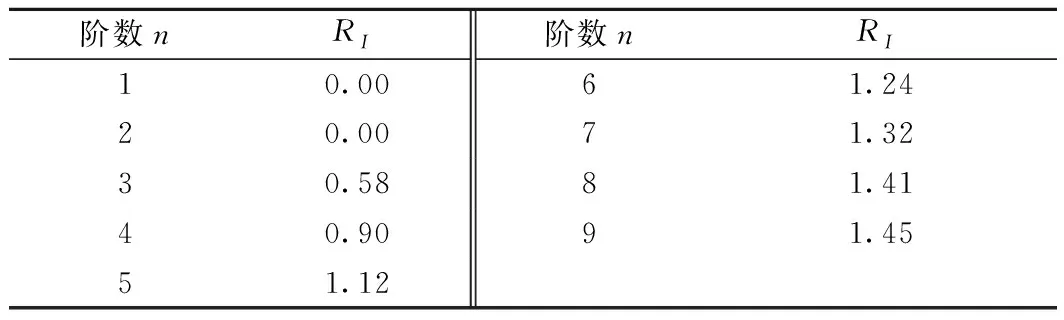
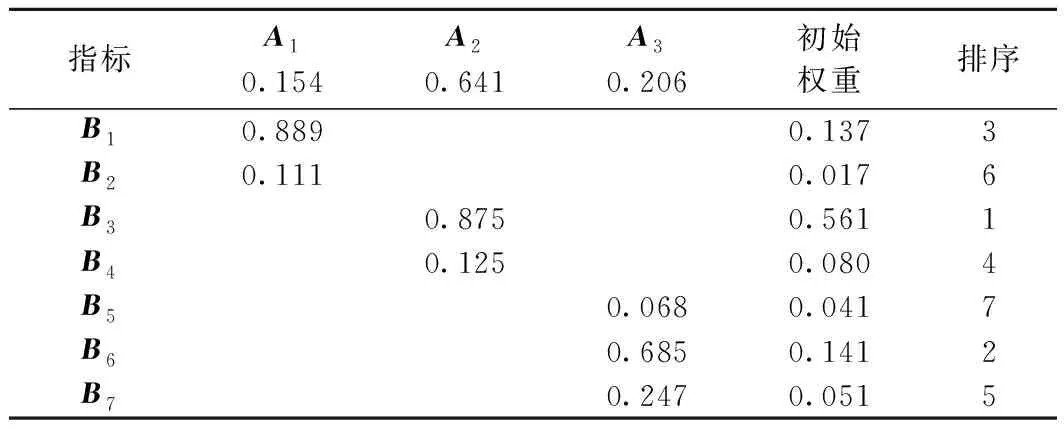
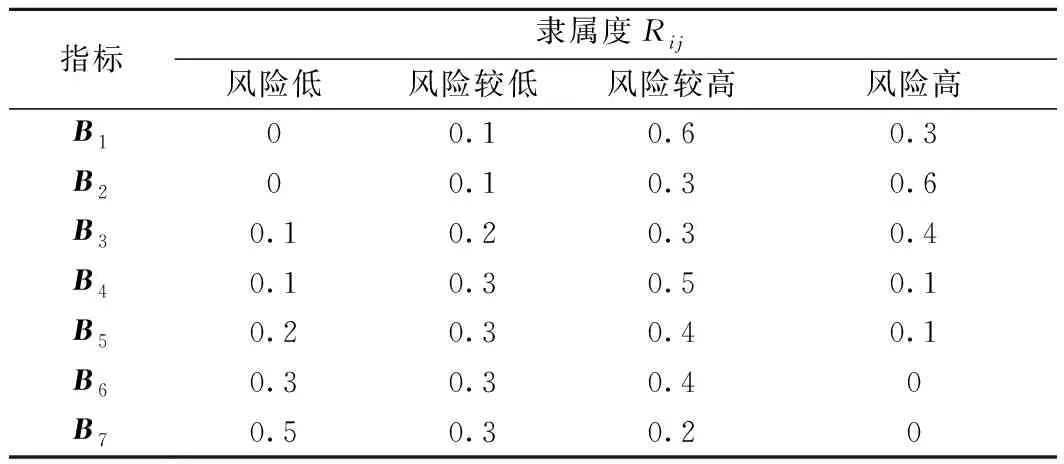
3 实例验证及分析
3.1 计算车载ATP主机的风险状态指标综合权重









3.2 确定车载ATP主机的风险指数


3.3 预测车载ATP主机的寿命和剩余寿命
4 结论