某类飞行器回收系统研究∗
2020-09-28
(91550部队41分队 大连 116023)
1 引言
某类飞行器由发射平台在水下采用垂直发射的方式,在研制阶段需进行一定数量的弹射试验,以用于该类飞行器水下发射条件适应性研究和水下发射关键技术的考核和验证[1~2]。如果设计一种可以回收该类飞行器的回收系统,不仅可节约大量研制经费,还可缩短研制周期。
2 回收系统方案构想
回收系统设计的核心是飞行器在发射前回收系统的回收网处于收拢状态,让开飞行器出水通道,对飞行器出水姿态的验证无影响[3]。当飞行器出水通过回收系统后,回收网快速打开,保证飞行器回收。通过多层回收网,在飞行器下落时逐步降速,降低其减速载荷。
回收系统主要由浮力平台(含浮箱和桁架)、检测系统、回收装置、移动收紧装置、锚泊定位系统等组成,其结构设想三维效果图如图1所示。回收系统由锚泊定位系统固定在发射平台上方,当检测系统探测到飞行器出水,其尾部运动到上层回收网上方后,会为移动收紧装置提供触发信号;移动收紧装置使三层回收网同时在设定的时间内快速移动到位,从而确保回收网顺利回收飞行器。回收网通过高强度复合纤维网来吸收飞行器下落过程时的动能和重力势能,保证飞行器的顺利回收。
3 系统组成、功能及原理
3.1 浮力平台
3.1.1 组成
浮力平台由浮箱结构和桁架结构组成。浮箱布置在四个角,浮箱之间通过桁架连接。桁架结构布置在浮箱结构上层甲板,高度方向上桁架结构分为三层。
3.1.2 功能
浮力平台主要功能:作为支撑平台用来布置回收装置、定位系统、检测系统、移动收紧装置。
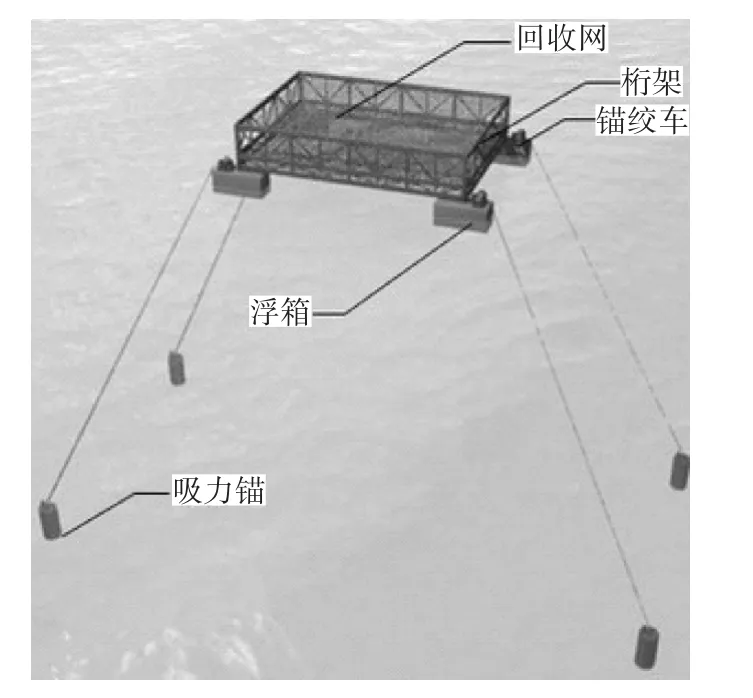
图1 回收系统结构设想图
3.2 检测系统
3.2.1 组成
检测系统主要由实时监控系统和图像采集系统组成。每层回收装置设置1套实时监控系统和2套图像采集系统。
3.2.2 功能
检测系统主要功能:探测飞行器出水后的运动,为回收装置提供触发信号;实时拍摄回收装置的运动和受力状态,为回收过程的分析提供依据;拍摄飞行器出水飞行实况。
3.2.3 原理
实时监控系统采用连续激光器作为光源[4],以高灵敏度信号采集器为接收器件。采集器接收到的信号通过数模转换之后,传递给高速多路信号处理器进行处理。当目标没有出现的时候,采集器始终接收到光源信号。当目标出现的时候,采集器信号被阻断。
图像采集系统采用LED光源(主动照明)与高速摄像机为主要器件,高速高清摄像机以500FPS及以上的帧频时刻拍图,通过对图像的实时存储,保证后期的处理和回放。视天气情况,若需要主动照明,采用大功率大发散角的LED光源。
3.3 回收装置
3.3.1 组成
回收装置主要由上、中、下三层回收网、弹性装置等组成,每层回收网上都设置弹性装置,其结构示意图如图2所示。
3.3.2 功能
回收装置通过高强度复合纤维网来吸收飞行器下落过程时的动能和重力势能,从而保证飞行器的顺利回收。回收网的功能:飞行器下落后,为飞行器降速提供承载,实现飞行器回收。弹性装置的功能:一边与回收网连接,一边与支桁架连接,通过弹性变形降低飞行器下降过程负载。

图2 弹性装置结构示意图
3.3.3 原理
系统准备时,三层回收网均呈收紧状态,留出一定的空间,便于飞行器出水。飞行器发射时,检测系统工作,探测飞行器尾部飞出上层网后,为回收装置提供触发信号,驱动机构将回收装置移动到位并进行固定。
上层回收网的功能是负责实现飞行器的减速,使其由最大速度逐步减小,将飞行器最大的动能和势能转化为弹性势能储存在回收网中;中层回收网的功能是负责实现飞行器的完全接收,使其经过上层网减速后飞行器剩余的动能和势能全部转化为弹性势能储存在中层网中;下层网的功能是作为最后一套屏障,防止当上层、中层网均失效的意外情况下,下层网仍然能够对飞行器实现微损回收,保证发射试验的可靠性。
3.4 移动收紧装置
3.4.1 组成
移动收紧装置主要包括:特制高速气缸[5]、高压气源系统、高压气动控制阀、控制操作装置以及配套附件等组成。
3.4.2 功能
移动收紧装置采用特殊的动力装置为回收装置提供动力,使回收装置在设定的时间内快速移动到位,从而确保回收装置顺利回收飞行器。当上层回收装置在飞行器势能的作用下快接近中层回收装置时,反向运动,避免飞行器在回收装置上反弹。移动收紧装置安装位置可调,从而实现不同的运动行程。
3.4.3 原理
其结构示意图如图3所示。高速气缸作为动力源提供动力,通过动滑轮组牵引钢丝绳运动,钢丝绳通过定滑轮组、张紧轮、换向轮对滑车进行牵引,滑车通过弹簧机构牵引回收网,实现整张回收网在水平方向的牵引运动。假定气缸的速度为v,动滑轮组整体速度为v,通过动滑轮定理可知,作用于钢丝绳的速度为4v,则张紧轮以及换向轮的速度为4v,实现了行程放大的功能。滑车通过弹簧机构拉动整张网迅速拉网,在运动到行程边界时触发行程开关,锁死机构将其锁死。

图3 移动收紧装置结构示意图
3.5 锚泊定位系统
3.5.1 组成
锚泊定位系统主要由锚泊系统和定位测量系统组成。其中锚泊系统由吸力锚系统、锚泊铰车、平台监测系统等组成;定位测量系统主要由发射基阵(安装于发射平台)、发射控制装置、接收基阵、水声信号处理装置、同步时钟(铷原子钟)、声速深度测量装置等组成[6~7]。
3.5.2 功能
锚泊系统:由4个斜向吸力锚将回收系统固定在发射平台上方。
定位系统:在飞行器发射前,为回收平台提供精确的定位信息,使回收平台中心与海底发射平台的发射筒中心对准,确保飞行器准确从回收平台发射窗口处出水;将测量的位置信息通过信息接口自动传送给回收平台锚泊控制装置。
3.5.3 原理
1)锚泊系统原理
吸力锚由本体、吊杆、吊钩、泵阀贯入系统、吸力锚安装检测系统、水下解脱装置等组成,同时配置布锚绞车、吊装装置、浮筒、示位标等配套设施。吸力锚的本体是一种大型圆柱薄壁钢制结构,其结构示意图如图4所示。其底端敞开、上端封闭并设有抽/注水口,依靠本体内形成负压将锚压入泥沙中或使吸力锚本体内形成正压将锚拔出泥沙。具有定位精确、方便施工、可重复利用等特点[8~9]。
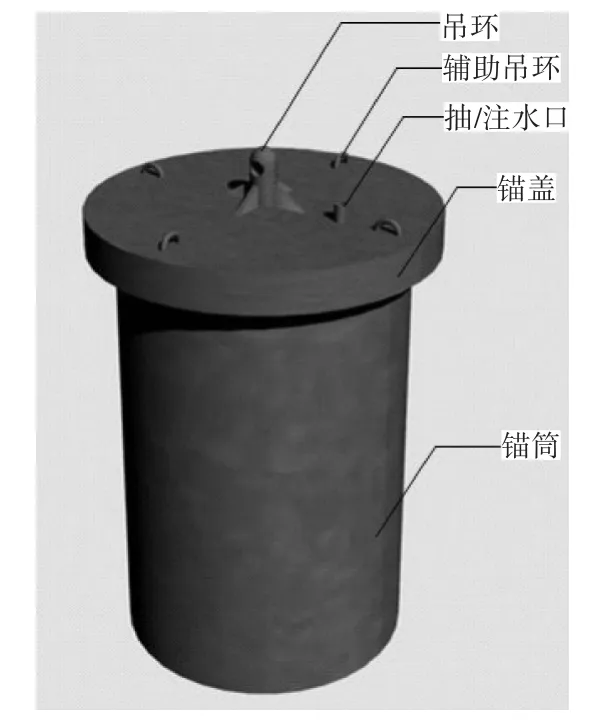
图4 吸力锚结构示意图
2)定位系统原理
采用水声超短基线的原理[10],保证回收平台与发射平台的中心对准,其原理图如图5所示。在水下发射平台中心布置1个发射基阵,在回收平台四角分别布置4个接收基阵。发射基阵发射LFM声脉冲,4个接收基阵分别接收声脉冲信号。由于声脉冲上调制了时统的标准时间,通过比较接收水听器的接收时刻与发射换能器的发射时刻,即可计算出接收与发射时间差,进而利用海水中的声速计算出接收水听器与发射换能器之间的距离。通过4个接收水听器与发射换能器的空间矢量距离,即可计算出回收平台中心与发射换能器之间的位置差,为回收平台的位置调整提供依据,保证回收平台与发射平台的中心对准。声速深度测量装置用于测量试验海区的声速剖面分布,提高距离测量的精度。
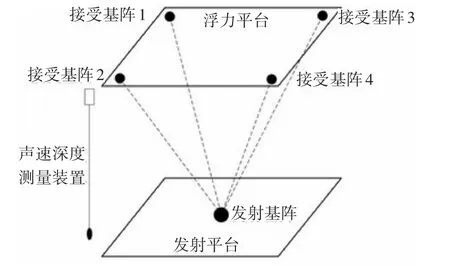
图5 定位系统原理图
4 方案可行性论证
4.1 回收系统稳性论证
经计算分析回收系统在9级突风作用下横倾角为0.391°。
在水面6级海况下,回收系统可能正好位于波峰与波谷中,由于其被锚链系住,因此两端落差为3m,横倾角度为φ=arc tg(3/40)=4.3°,其稳性满足舰船相关稳性要求[11]。
4.2 回收网相关论证
4.2.1 回收网尺寸论证
为保证飞行器的着落点在回收装置的绝对控制范围内,针对飞行器的发射数据进行分析,最终设计方案为回收网的主尺寸,保证飞行器的落点分布均在足够的安全区域内。
估算模型不考虑飞行器出水后的角速度等参数,仅按照质点运动进行分析。参照其坐标系的定义方法,x为艏艉向,y为高度,向上为正,z为舷侧向,按照坐标系的右手法则,若定义艏向为x正方向,则右舷为z正向。对该类飞行器以往发试验数据进行统计分析,回收网尺寸是合理的。
4.2.2 回收网强度论证
回收网采用48-9000芳纶带[12],宽度48mm,断裂强力9t。将5根48-9000芳纶带叠加形成一根网带的方案,其断裂强力可达45t,由于网带相邻间距为200mm,则四个方向上各有10根网带,设每根网带均匀受力,经过估算,每根网带受力约为23t,由于每根网带断裂强力为45t(5根叠加),则安全系数为:45/23=1.96。针对飞行器在不同姿态时的高频着落点和关键危险区域,布置能够吸收动能的柔性缓冲吸能垫,该材料分子间可以流动,以便其对飞行器圆周着落部分形成一种密切的裹附,防止飞行器的尖锐部分发生剪切,造成无损回收的无法实现。
4.2.3 回收网展开时间论证
经对该类飞行器以往试验数据进行统计分析,得出飞行器出水后穿越上层网至回落至上层网时间差,考虑到移动收紧装置启动、扣紧等时间,得出移动收紧装置收紧时间。移动收紧装置需要提供足够的功率满足载荷的驱动,同时需要有极快的响应速度。经计算分析,采用工作介质为高压气体,工作压力为10MPa;运动速度 ≥15m/s的高速气缸,其响应特性和功率满足要求。
4.3 桁架高度论证
分析桁架的高度布置时需重点考虑以下几个方面:
1)桁架的高度过大,受力大,将使水平面方向上桁架的剪切力较大,这不利于桁架的结构设计;
2)回收系统总体保持较高的稳定性,在浮箱和桁架不变的条件下,回收系统的布置高度越高,其稳定性越差;
3)飞行器出水后的高度要求及回收系统快速铺设装置的时间要求,其布置高度越低,就能为快速铺设装置提供更多的收紧时间;
4)飞行器与上层回收网接触后垂直方向上的加速度不能过大,提供的上层回收网与中层回收网之间的间距越大,向上的加速度越小。
综合上述条件考虑,经分析计算,设置上层回收网的布置高度为10m,中层网布置高度为4m,下层网布置高度为2m。
4.4 上层回收网不反弹原理
回收网展开到位后滑车锁定,当回收网在飞行器的冲击下向下拉伸,锁定剪切销达到最大剪切力时,锁定装置完全解锁,滑车机构处于沿轨道自由运动状态,回收网可以自由收缩,以实现飞行器在上层网的不反弹。
5 结语
本文设计的回收系统用于某类飞行器在水下发射平台进行弹射试验时的无损或微损回收。如果回收系统在该类飞行器研制试验中得到应用,不仅可节约大量的研制经费,还可缩短研制周期。本文对回收系统的研究仅从原理和可行性方面进行论证分析,进入工程设计阶段后需通过大量的计算和仿真分析得出回收系统的具体尺寸和建设方案。
