基于分布式SAR系统的侦察卫星目标定位技术
2020-09-26任楷
任 楷
(郑州大学 网络管理中心,郑州 450001)
0 引言
SAR中文全称合成孔径雷达,外在表现为一种具有主动性的对地型观测系统,能加装在宇宙飞船、卫星、遥感飞机等多个飞行平台之中,对地表障碍物具有较强的物理穿透能力,可对单一目标主体实施全天候的观测。通常情况下,SAR系统能够长期维持稳定的分布运行状态,可联合星载平台、机载平台等硬件执行设备,对无人机、地基、弹载等空间主体实施定向化控制,从而使多频卫星滤波逐渐融合至统一的频段区间内,一方面降低超高目标分辨率对侦查定位精准性造成的抑制影响,另一方面可促使多模式定位技术快速向着实用型方向转化[1-2]。随着SAR图像生成数量的不断增加,地表控制主机发出的无线电脉冲能量也逐渐增大,进而照亮更多的侦查目标场景,达到缩短脉冲波长的目的。
被动目标定位是一种重要的侦察卫星行进控制手段,能够借助相位处理器、转存调节模块等装置,实现对相关定位指标的定性与定量控制。传统DDS算法是侦察卫星目标定位技术中的重要应用环节,可在统计卫星收发机前端射频总量的基础上,确定目标芯片所承载的定位驱动条件,再联合Nios II软核为待测卫星主体分配适量的侦查动能。但随着待定位目标总量的不断增加,由这种方法所引起的LCT指标、LOC指标上升行为均不能达到预期标准水平。为解决上述问题,引入分布式SAR系统,在相位累加器、D/A分布模块等硬件结构的支持下,设计一种新型的侦察卫星目标定位算法,并通过测算实际侦查角度的方式,突出说明传统算法与新型算法之间的应用差异性。
1 基于分布式SAR系统的卫星定位执行结构
基于分布式SAR系统的卫星定位执行结构由侦查调节模块、卫星目标相位累加器、SAR型存储模块、D/A分布模块四部分组成,具体搭建处理方法如下。
1.1 侦查调节模块
侦查调节模块是分布式SAR卫星系统的核心组成结构,由CP243-1板材、总线集成电缆、总线连接器、相位存储插座、累加接线板五部分共同组成。其中,CP243-1板材位于侦查调节模块中部,能负载其它卫星系统元件的连接插入行为,向上与定位控制主机相连,直接获取其中已记录的目标存储数据,向下调节SAR型存储模块、D/A分布模块的接入行为,达到精准定位侦察卫星被动目标点的目的。总线集成电缆位于侦查调节模块左端,具备较强的自主伸缩能力,在侦查卫星目标定位点数量等级不断提升的情况下,该结构的最外侧端点持续外撤,直至电缆体完全外露;在侦查卫星目标定位点数量等级不断下降的情况下,该结构的最外侧端点持续内移,直至最外侧端点与CP243-1板材边缘完全重合[3]。总线连接器内嵌于CP243-1板材之中,同时监管相位存储插座与分布式累加接线板所承载的定位处理指令,在上述两物理结构同时保持接入状态的情况下,连接器也随之进行连续处置形式;而在上述两物理结构同时保持断开状态的情况下,连接器也只能出现间断性处置行为。

图1 侦查调节模块结构图
1.2 卫星目标相位累加器
卫星目标相位累加器附属于侦查调节模块,是分布式SAR系统中的重要执行控制元件,由外部器件壳体及内部板材结构共同组成。外部器件壳体是卫星目标相位累加器的外部保护结构,通常由非导体材料构成,在侦查卫星实施定位目标追踪的过程中,分布式SAR系统核心控制主机会向外输送大量的自由电子,用于负载相关硬件设备的连接执行功能[4]。随着卫星航行时间的延长,电子大量累计,导致卫星目标相位累加器表面出现一定水平的游移电荷,为避免因电量偏移而造成目标定位精准程度的大幅下降,外部壳体将散乱分布的点电荷疏导至SAR型存储模块及D/A分布模块之中,一方面缩减了传输电子的平均用量,另一方面也适当提升了侦查目标定位的实际精准性数值。

图2 卫星目标相位累加器结构图
相位调节主板、累加处置主板同时负载于内部执行芯片之上,在定位消耗电阻的调度调节之下,可联合AML8726-H芯片与NT5DS32M16BS-5T芯片处理系统模块之间的负荷连接请求[5]。在模块接入卡槽呈现持续占用状态的情况下,消耗电阻的实际阻值快速增大,并以此促进AML8726-H芯片与NT5DS32M16BS-5T芯片之间的传输间距不断缩短,直至确保侦查调节模块中的卫星目标定位数据总量不再发生改变。
1.3 SAR型存储模块
SAR型存储模块以核心存储芯片作为基础搭建设备,外部负载多个插入指针,可直接伸入系统指定模块之中,借助输入、输出导线建立与侦查卫星定位主机的物理连接。SAR型存储芯片具备相对稳定的定位执行功能,与目标相位累加器同属于系统分布处理结构[6]。通常情况下,SAR型存储模块具备3种独立式的工作状态:
1)与侦查调节模块相连:直接获取与侦查卫星目标定位相关的数据指标,并转换成既定信息形式,存储于SAR型系统模块之中。
2)与卫星目标相位累加器相连:将与侦察卫星目标相关的追踪数据转化成自由连接信息形式,再借助插入指针反馈回SAR型存储模块之中,最终生成满足定位需求的应用数据包。
3)与D/A分布模块相连:改变侦查卫星目标定位信息的现有分布形式,建立SAR型存储模块与核心系统主机之间的数据化连接。
1.4 D/A分布模块
D/A分布模块是SAR系统的最底层执行结构,由执行元件、NCO IP核、TLC5620芯片、NMEA-O183芯片四部分结构组成。其中,D/A元件具备较强的定位数据承载能力,可按照SAR型存储模块的现有执行状态,选择性建立与卫星目标相位累加器之间的定向连接关系。NCO IP核作为D/A分布模块的核心设计结构,能够充分感知处理主机所呈现出的侦查卫星目标定位行为,再联合SAR系统中的传输电子,决定定位处置指令的实际判别权限,实现精准定位待识别目标的目的[7]。TLC5620芯片在D/A分布模块中占据最大的应用空间,是判处卫星目标定位指令实施权限的重要元件,在不出现明显侦查变化的情况下,该结构可以直接干预定位主机的输出能力,弥补由卫星目标定位偏移而造成的数值误差。NMEA-O183芯片位于D/A分布模块的右下部,负责协调该项结构体与其它硬件设备之间的传输关系,若待处置定位数据的物理实值始终不能达到预期数值水平,该芯片会快速断开与其它设备体之间的信息沟通连接,直至侦查卫星定位目标只能在限制范围内保持行进活动状态。
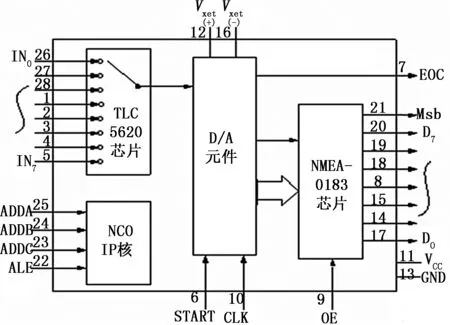
图3 D/A分布模块结构图
2 侦察卫星的目标自定位
在基于分布式SAR系统执行结构的支持下,按照定位传感器选型、侦察定位坐标转换、目标通讯协议连接的应用流程,完成侦察卫星的目标自定位处理。
2.1 定位传感器选型
侦查卫星目标定位传感器具备Pixhawk飞控板、航模无刷电机、电子调速器、GPS模块4种基本表现形式。其中,Pixhawk飞控板直接作用于分布式SAR系统的侦查调节模块,擅长处理相邻卫星目标点之间的限制影响关系,在其它外设组织保持兼容并行的情况下,该类型定位传感器具备最为广泛的作用调节空间。航模无刷电机直接作用于卫星目标相位累加器,只能执行系统电动机与驱动器之间的动态调节指令,在相关SAR组织呈现信息惯性输出的情况下,该类型定位传感器能够围绕卫星定位数据的直属作用区间,提供侦查目标处置所需的一切应用节点[8-9]。电子调速器直接作用于SAR型存储模块,始终与分布式系统无刷电机保持相同的调频速率,在侦查卫星目标分布较为散乱的情况下,该类型定位传感器可根据处置指令的作用范围,调节数据信息的实际输出行为,从而控制后续坐标转换处理所需的具体数值条件。GPS模块直接作用于D/A分布模块,能够按照分布式SAR系统相关侦查卫星组织的从属定位行为,判断目标识别处置的实施精准性,达到缩小侦察定位坐标实际应用范围的目的。
2.2 侦察定位坐标转换
侦查定位坐标转换可根据定位传感器的具体型号条件,控制侦查卫星目标的实际分布范围,再通过分别定义x、y、z轴基向量的方式,处置相邻定位节点之间的从属关系[10]。x轴是侦查定位坐标系的横向分布条件,受到分布式SAR系统横向输出信息分量y1的作用影响,在既定输出时间内,可使定位节点数据保持稳定的横波驱动行为。y轴是侦查定位坐标系的纵向分布条件,受到分布式SAR系统纵向输出信息分量y2的作用影响,在既定输出时间内,可使定位节点数据保持稳定的纵波驱动行为。z轴是侦查定位坐标系的空间分布条件,受到分布式SAR系统空间输出信息分量y3的作用影响,在既定输出时间内,可使定位节点数据保持稳定的空间驱动行为。联立上述物理量,可将侦查定位坐标的转换公式定义为:
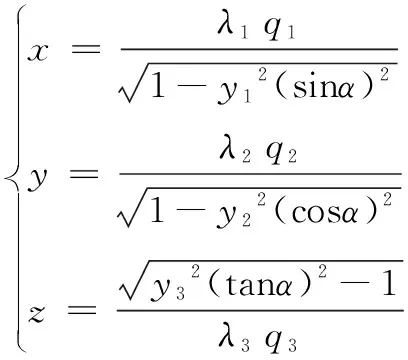
(1)
其中:λ1、λ2、λ3分别代表定位坐标系的横向、纵向与空间SAR作用条件,q1、q2、q3分别代表分布式系统对于侦查卫星目标的横向、纵向与空间调配系数,sinα、cosα、tanα分别代表卫星目标侦查定位夹角α的正弦、余弦、正切值。
2.3 目标通讯协议
侦查卫星目标通讯协议确保了分布式SAR系统的定位精确性,具备GPGGA、GPGSA、GPGSV、GPRMC等多重实际表现形式。为适应卫星目标的侦查定位需求,所有通讯协议均满足NMEA-O 183语句对于数据信息的限制标准,即在单一目标定位时间区段内,有且仅有一项目标通讯协议可以直接影响SAR系统对于定位信息的实际作用效果。GPGGA、GPGSA、GPGSV通讯协议始终保持72位的作用帧长,在侦查卫星目标正弦值出现微小偏差的情况下,可限制x坐标轴的平均波动幅度。GPRMC、GPVTG、GPGLL通讯协议始终保持65位的作用帧长,在侦查卫星目标余弦值出现微小偏差的情况下,可限制y坐标轴的平均波动幅度。详细的目标通讯协议连接原理如表1所示。
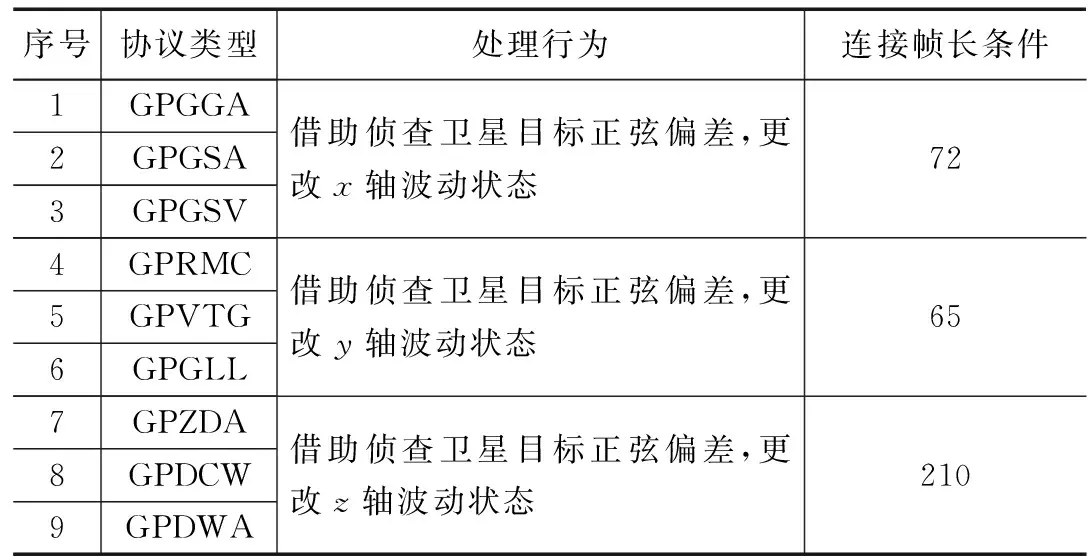
表1 目标通讯协议连接原理
3 目标定位算法的设计与应用
按照侦察卫星的目标自定位原则,联合分布式定位原理、卫星目标侦查角度、目标定位信息接收与转存流程,完成基于分布式SAR系统的侦察卫星目标定位应用算法设计。
3.1 分布式定位原理
侦查卫星SAR系统分布式定位原理由空间部分、地面控制部分两个分类方向。
空间部分:不限制侦查卫星的实际行进位置,但无论处于哪一空间方位上的目标主体都只向同一定位主机传输连接信息。通常情况下,侦查卫星的飞行轨迹处在相同的高度水平,且能够自主感知地表定位基站及目标节点的真实位置[11]。
地面控制部分:地面控制主体由一个地表定位基站和一个卫星目标共同组成。基站负责收集由侦查卫星输出的定位数据,在测算侦查偏移角度数值的同时,统计相关SAR参数在横向、纵向及空间方向上的投射指标。卫星目标是一个具备接收感知功能的执行主机,能够按照侦查系统定位行为的变化情况,计算定位坐标系的实值转换范围,从而确定侦查卫星与定位目标之间的垂直物理距离[8]。

图4 侦察卫星SAR系统分布定位原理
3.2 卫星目标侦查角度测算


(2)
其中,arctanα代表卫星目标侦查定位夹角α的反正切值,f代表分布式SAR系统中的卫星侦查系数。
3.3 目标定位信息的接收与转存
目标定位信息接收与转存是两个非完全不相关处理流程,能够根据侦查节点所处的真实位置,判断分布式系统的实际执行情况,再联合既定信息存储元件,实现数据参量的提取与处置(如图5所示)。在侦查调节模块保持定频输出的情况下,卫星目标相位累加器可与SAR型存储模块建立自发连接关系,再根据D/A分布模块中定位信息的传输等级水平,控制与定位传感器相关的选型行为[13]。随着侦察定位坐标转换手段的实施,相关模块中的目标通讯协议可自主控制连接帧长条件的数值水平,再联合分布定位原理,测算卫星目标侦查角度的实时偏转度量,完成侦查卫星目标定位信息的转存接收处理。

图5 目标定位信息接收与转存流程图
至此,完成前期理论环境搭建及相关数值参量计算,在分布式SAR系统的支持下,实现侦察卫星目标定位算法的顺利应用。
4 算法实践性检测
为对比基于分布式SAR系统侦察卫星目标定位算法、DDS算法间的实用差异性,设计如下对比实验。在虚拟网络环境中模拟侦察卫星的实际飞行轨迹,设置两台执行主机和一台辅助主机,对地面环境中不同的目标主体实施定位监控,其中实验组卫星搭载新型侦察卫星目标定位算法,对照组卫星搭载DDS算法。
4.1 检测应用环境
借助无线反馈装置,将实验组、对照组侦察卫星的定位信息传输至核心监测主机中,再根据固定时间区段内指标数值的波动情况,绘制参数向量的具体变化曲线。
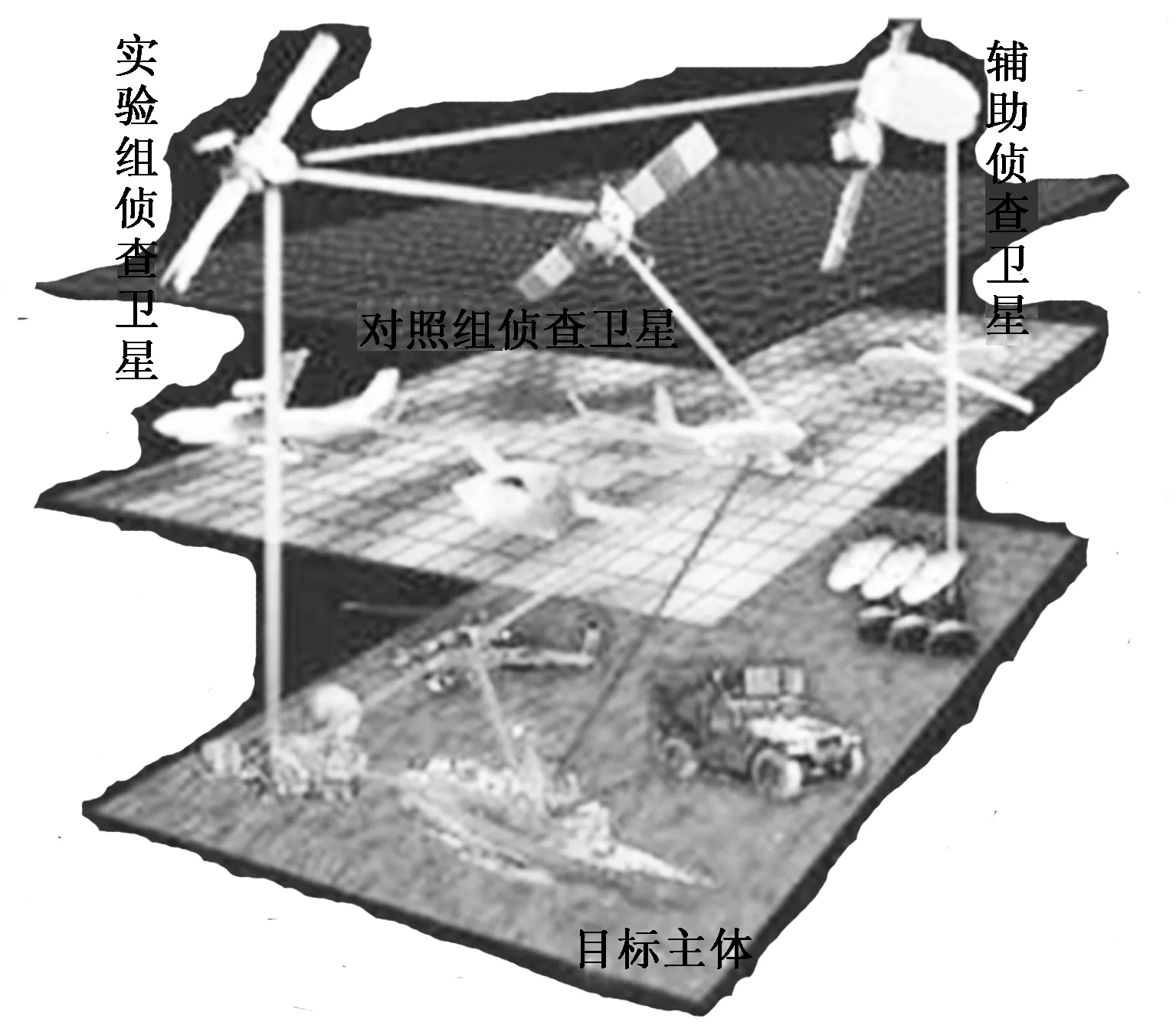
图6 实验模拟环境
4.2 LCT指标数值对比
LCT指标也叫横向分布指标,始终与侦察卫星被动目标定位跟踪精准性保持相同的变化趋势。图7反应了50 min的监测时间内,实验组、对照组LCT指标数值的具体变化情况。

图7 LCT指标数值对比图
分析图7可知,监测时长处于0~10 min、30~40 min、40~50 min之间时,实验组LCT指标数值均高于对照组,最大参数水平达到66%,远超对照组极值24%;监测时长处于10~20 min、20~30 min之间时,实验组LCT指标数值随略低于对照组,但实际差值水平较小基本不超过1%,可近似忽略。综上可知,应用基于分布式SAR系统侦察卫星目标定位算法,确实可提升LCT指标的实际数值水平。
4.3 LOC指标数值对比
LOC指标也叫纵向分布指标,也与侦察卫星被动目标定位跟踪精准性保持相同的变化趋势。表2~3反应了50 min的监测时间内,实验组、对照组LOC指标数值的具体变化情况。

表2 实验组LOC指标数值
对比表2~3可知,实验组LOC指标在整个监测过程中虽然一直呈现波动变化状态,但上升或下降的幅度极小,基本维持阶段性稳定的行为趋势,全局最大值达到63.78%;对照组LOC指标前期一直不断下降,在达到稳定

表3 对照组LOC指标数值
状态后,开始小幅度上升,全局最大值达到38.47%,远低于实验组极值水平。综上可知,应用基于分布式SAR系统侦察卫星目标定位算法,对LOC指标数值水平上升具有极强促进作用。
5 结束语
分布式SAR系统与传统DDS算法的控制体系相比,具有信息接收转存能力强、测算角度计算精准等应用优势,在侦查调节模块、卫星目标相位累加器、存储模块、D/A分布模块四类硬件执行设备的促进下,实现侦察定位坐标系的转换与应用,最终使得所有定位传感器都得到妥善的通讯协议连接。从实用执行的角度来看,横、纵向分布指标均出现不同程度的上升变化行为,有效降低侦察卫星被动目标失精准定位跟踪事件的出现几率。
