起重机的智能化技术专利分析
2020-09-24王丹华
王丹华


摘要:目前,随着现代化技术的发展,起重机作为一种不可缺少的搬运、装卸设备,使用者对其性能的要求越来越高,尤其是对起重机智能化作业方面的要求越来越高,突破复杂环境下的人工智能、自动识别作业环境、复杂设备的寿命周期管理、故障诊断报警等智能化技术,最终开发出具有高度自动化水平、自带安全管理系统、可以实现远程监测控制的智能装备也逐渐成为起重机智能化发展的研究热点。本文从相关专利文献的角度对起重机的智能化技术进行了统计分析,包括专利申请的趋势、专利申请分布情况和重要申请人信息,并具体对技术组成和具有代表性的专利進行了分析。
关键词:起重机;智能化;自动识别;安全管理系统;故障诊断
中图分类号:TU61;G306文献标识码:A 文章编号:1003-5168(2020)27-0153-05
1 引言
公元前10年,古罗马建筑师维特鲁维斯曾在其建筑手册里描述了一种起重机械,这种机械有一根桅杆,杆顶装有滑轮,由牵索固定桅杆的位置,用绞盘拉动绕过滑轮的缆索,以吊起重物,但起升幅度很小,操作也十分吃力。到了15世纪,意大利科学家发明了转臂式起重机,才解决这些问题。1805年,格兰工程师伦尼为伦敦船坞建造了第一批蒸汽起重机。20世纪初期,欧洲开始使用塔式起重机,随着起重机的发展,起升机构、运行机构、变幅机构、回转机构和金属结构等成为了起重机设备不可缺少的重要结构部件。直到现在,各行业生产规模的扩大,生产自动化程度的提高以及科学技术的发展,推动了现代设计和制造能力的提高,起重机作为各领域物料搬运的主要设备,各行业对起重机的安全性、便捷性、智能化的要求也越来越高,其中智能化也逐步成为起重机未来的发展趋势之一[1]。
起重机在特定的范围下进行水平方向移动和垂直方向起升物体,主要用来搬运物料,其动作特点具有动作间歇性和作业循环性[2]。起重机被广泛应用于厂房、搬运场地、仓库、港口等,在生产活动中是不可或缺的。起重机具有多个不同的类型,按照用途可以分为通用起重机、建筑起重机、冶金起重机、铁路起重机、港口起重机、造船起重机、甲板起重机等,按照结构不同可划分为桥式起重机、龙门起重机、流动起重机、悬臂起重机、塔式起重机、缆索起重机、船式起重机、运载桥等[3]。
通常,智能起重机是将某些智能技术整合到起重机中,使起重机可以有效完成自身的起重任务,并可通过编程自动控制操作和移动,也可以全面识别外界环境,对人的操作进行模拟,起升吊运物体[4]。无需很多专业人员,仅需一名操作人员在中央控制室便可以监控多台起重机按照生产需求进行规范作业,因此,智能起重机也被称为无人起重机或起重机器人,因此,智能起重机可以大大缩减人力需求,大幅度改善工作效率[5]。
2 起重机智能化技术的专利现状分析
本文主要采用incopat数据库,针对去噪后的起重机智能化技术在全球的970件专利文献进行申请趋势分析,其中,由于专利文献从提出申请到向公众公开有时间的延后,因此,2019年及2020年的样本会不完整,所以,对于申请量趋势图中2019年和2020年申请量下降的趋势不排除是由于样本数据量的不完整性造成的。排除了2019—2020年部分尚未公开的专利,可以看出,起重机智能化技术专利文献的申请量从2005年开始呈现上升态势,而从2009年开始该技术的专利文献申请量进入了明显增长阶段,这也与各起重厂家和研究单位对起重机行业智能化技术的关注程度变化相一致。
2.1 专利申请量趋势分析
图1示出了起重机的智能化技术的全球专利申请趋势状态。由图1可以看出,该技术专利最早出现在1989年,其技术发展趋势按照专利申请量的情况主要分为3个阶段:
阶段1:申请起步阶段(2006年之前)
1989年—2006年,这一时期起重机的智能化技术的专利申请量较少,1989年出现了第一项涉及起重机智能化技术的相关专利申请,随后的一段时期内,申请量一直维持在较低的水平,没有明显的增幅,直到2006年专利申请量达到5项,相比2005年申请量开始出现了有史以来第一次明显的增加。这段时期由于产业化水平以及起重厂家和科研单位对智能化起重机的关注程度相对较低,导致起重机的智能化技术相关专利申请量较少。
阶段2:缓慢发展阶段(2007年—2009年)
2007年—2009年,起重机的智能化技术相关专利申请数量开始出现增长,但增长速度较慢,这也标志着起重机的智能化技术进入了初步发展阶段,同时,该技术的生命周期也进入成长期,标示着起重机的智能化技术的专利研究开始受到相关领域的广泛关注,使该技术的相关专利申请量处于缓慢平稳增长状态。
阶段3:快速发展阶段(2010年—2018年)
从2010年开始,起重机智能化技术的相关专利申请量呈现出迅速增长的态势,直到2018年申请量达到214件,这说明该技术已广泛受到关注,且该技术领域主体对起重机智能化技术的创新研发和对专利的重视程度大大提高,并逐渐开始重视专利布局。
2.2主要国家/地区/组织专利申请量分析
专利申请具有地域性,某一特定技术领域的专利申请的地域分布可以反映出该技术领域的发展状态。经过对起重机智能化技术相关专利申请的地域分布进行统计分析(如图2所示),可以看出,中国、韩国、世界知识产权组织的相关专利申请量排在前三位,其中,中国的申请量占据第一位,占全部申请量的95.97%,遥遥领先其他国家或组织。由此可以反映出中国在起重机的智能化技术上具备较强的技术储备和研发能力,同时也展现了中国的相关企业和科研单位在起重机的智能化技术上的优势。
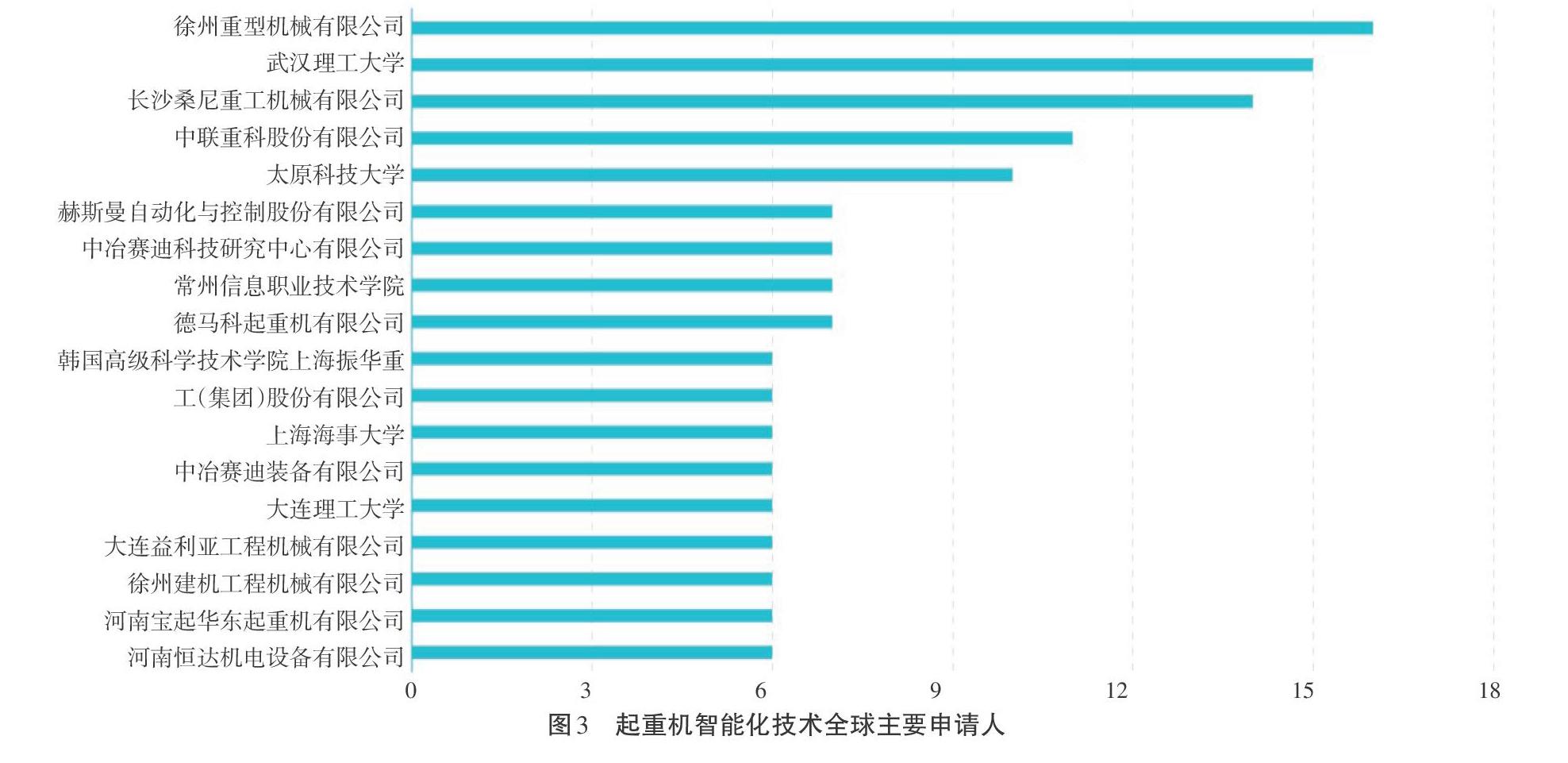
2.3 全球主要申请人分析
由图3可知,全球排名比较靠前的申请人大多数是中国的企业、高校及科研单位。其中,徐州重型机械有限公司、武汉理工大学、长沙桑尼重工机械有限公司排在前三位,申请量相差不多,均具有较强的技术研发能力,另外,排在第四位和第五位的分别是中联重科股份有限公司和太原科技大学,也具有较多的申请量,技术能力同样不可小觑。排名第六位到第十九位的申请人拥有几乎相同数量的专利申请量,由此可见,本技术领域的专利分布并非一枝独秀,相反,分布比较广泛,呈现遍地开花的景象,这一现象也对该技术的进一步发展大有裨益。
对于中国申请人,由图4可见,主要申请人为企业、个人、大专院校、科研单位以及机关团体,其中,起重企业的申请量最大,包括徐州重型机械有限公司、长沙桑尼重工机械有限公司、中联重科股份有限公司等在内的一些企业,其申请量具有绝对优势,例如,徐州重型机械有限公司于2016年申请了一种起重机吊钩摆动的监控系统及方法(CN201610679199.4),通过控制器实时读取回转编码器检测的回转角度信号,计算出当前回转速度及加速度,结合当前车身姿态参数计算出吊钩摆动角度、幅度,并发送给显示器,显示器将吊钩摆动角度、幅度在人机界面上进行显示;控制器通過读取力矩限制器发送的吊重量信息,结合吊钩摆动角度、吊钩摆动幅度、绳长信息,实时计算出吊钩摆动引起的臂架侧向载荷力,并发送给显示器进行显示。同时本发明将吊钩摆动系统相关的动态数据在人机交互界面上形象化展示,当摆角及臂架侧向力过大时,进行智能报警提醒,对手柄操作快慢智能评价并提醒,引导操作者安全作业。
其次申请量较多的大专院校包括武汉理工大学、太原科技大学、上海海事大学以及大连理工大学等,且这些大专院校的相关专利申请的专利价值较高,例如武汉理工大学于2018年申请了一种起重机开环优化防摇控制方法(CN201810222004.2),针对起重机开环防摇加速防摇和减速防摇运行距离过大的问题,本发明基于起重机动力学原理,利用起重机运行状态参数作为边界约束条件,实现起重机运行距离最小、加速或减速运行时间最短和运行轨迹最优的防摇控制,可有效抑制和消除负载偏摆,提高起重机运行稳定性;同时基于数值分析和计算机模拟技术,建立起重机运行速度、运行时间和起吊绳长之间的数学模型,提高了起重机开环防摇控制方法的适应性和工程应用性。武汉理工大学于2017年申请了一种基于模糊PID控制的起重机智能防摇控制系统及方法(CN201710637772.X),根据起重机系统动力学方程,采用位移PID和角度PID的双闭环反馈控制策略,即实现起重机系统大、小车位移的PID闭环反馈控制和负载偏摆角度的PID闭环反馈控制,实现起重机大、小车移动位移的精确控制和负载偏摆角度的有效抑制。同时,利用模糊控制器实现PID控制器参数的自适应调节,提高防摇系统抵抗外界干扰的能力,增加防摇系统对系统参数变化的适应性和鲁棒性。防摇控制系统利用绝对值编码器采集大、小车位移,并反馈至大、小车位移输入端,有效提高了大、小车位移的控制精确性;同时,利用工业相机实时采集负载偏摆图像,绝对值编码器实时采集负载起升高度,并均将其数据传递给工控机,工控机基于图像处理算法,根据负载起升高度得到负载偏摆角度反馈至负载偏摆角度输入端,并且采用人机交互技术,实现防摇系统的实时监控。
2.4 专利技术构成分析
通过对所分析的专利进行权利要求书和说明书的人工标引和具体解读,将起重机的智能化相关专利技术主题划分为5类,包括:一是定位识别技术,例如起重机的自动定位系统,物料的识别技术,吊具定位技术,智能避障技术,身份识别技术等;二是智能监测技术,例如远程监测系统,工况监测系统,运行速度监测系统,智能监测方法的优化,故障自诊断,智能防撞等;三是安全控制技术,例如安全吊装方法,不安全行为智能识别技术,防勾连技术,安全信息输入,防摇摆技术,安全距离监测,防坠落及报警技术等;四是智能管理技术,例如智能运行管理技术,安全监控管理系统,自动循环工作管理,实时数据收集管理,智能管理方式及算法等;五是结构优化,例如电气系统优化,部件配置方式,梁结构,构件连接关系优化等。
对于定位识别技术的研究,从所分析的专利文件来看,其中中国专利CN109231011B涉及一种基于二维码的起重机运行机构定位装置及定位方法,通过分别设置在起重机大车运行方向和小车运行方向上的二维码和设置在大车与小车上的二维码识别装置,接收小车二维码识别装置识别的第一识别信号和大车二维码识别装置识别的第二识别信号,再根据第一识别信号和第二识别信号计算获得起重机小车的位置信息和大车的位置信息,实现了对起重机运行机构的定位,为起重机的智能化、自动化运行提供了有利条件。此外,其他涉及起重机定位识别的专利技术还包括传感器技术、RFID射频识别技术、红外线等。
对于起重机的智能监测技术的研究,韩国专利KR102115584B1涉及一种起重机的智能化终端系统,卷扬机的负载监测单元将监测到的负载信息发送到智能终端的负载接收单元,智能终端对接收的负载信息进行计算分析并将计算结果发送给控制命令发送单元,从而根据负载信息控制卷扬机的起升作业,另一方面,操作者还可通过智能电话之类的移动设备与用户终端进行通话,以便用户及时发现并处理起重作业的报警故障,即实现了起重机的智能化作业,又提高了安全性。
对于安全控制技术的研究,中国专利CN105883615B涉及一种多段匀变速起重机智能防摇摆控制方法,根据起重机的实际使用情况,预先输入负载的最大允许摆幅和运行机构的各档位的速度,包括最大运行速度。编码器实时测量起升绳长,并将测量信息传递给控制中心和上位机。控制中心根据编码器测量的起升绳长和预设负载的最大允许摆幅,基于起重机系统动力学分析规律,计算运行机构加速度和负载偏摆周期,并根据输入整形控制算法输出控制信号,最终通过改变变频器频率控制运行机构的多段匀变速运行来抑制负载的偏摆。同时,控制中心将运行机构运行参数通过无线发送至上位机进行监测并显示。该防摇摆控制方法采用负载的最大允许摆幅作为控制输入量,根据负载偏摆周期将小车加速或减速过程分为多段匀加速或多段匀减速过程,即在起重机启动时,通过控制起重机小车多段匀加速运行,或者在起重机制动时,通过控制起重机小车多段匀减速运行,来减小和消除起重机运行过程中负载偏摆,提高了起重机的智能化水平和控制精度。
对于智能管理技术的研究,中国专利CN205545375U涉及一种起重机械安全监控管理系统,通过采用信息采集模块、视频转换模块、存储单元、输出模块、网络模块、显示单元、通信模块和识别模块对起重机分部件进行探测以及对工作环境进行监测,实现对于起重机运行状况的实时了解,及时处理起重机械各部件发生的故障,避免引起重大的安全事故,同时在起重机械工作现场安装有现场摄像头,可以使得指挥人员以及操作人员同步掌握现场的情况,配合更加的默契,另外,采用的指纹识别机和作业卡识别器可以实现专人专机的操作,提高对于起重机械操作的监管,而且设置有通信模块直接通过GPRS信号将现场的信息传递到远程值班人员手机中,也可以传递到主管人员的手机中,实现远程实时一体化的管理,提升管理的效率,信号采集模块将起重机械的运行信息经过加密后存储到存储单元,这样有利于后续针对故障的排查和后期的维护,智能化程度较高。
对于结构优化的研究,中国专利CN208561447U涉及一种智能起重吊钩,因为具有设置在所述吊钩本体上的供电单元能够供电;具有的应变测量单元,固定安装在所述安装凹陷上,能够测量所述弯钩部分受到的应变;数据传输单元,能够接收应变信号,并将所述应变信号传送给该计算终端,所以本实用新型的智能起重吊钩能够随时监测起吊时的载荷,通过与外部的计算终端的连接来对吊钩的起吊载荷是否超载、吊钩的受力是否处于安全范围进行控制和监督,从而预防吊钩损坏或超负荷导致的生产事故的发生,进一步还能计算外部某一个智能起重吊钩起吊的实际工作量,从而实现了普通吊钩的智能化。
3 结论与建议
通过从专利申请角度全面分析国内外对“起重机智能化技术”的研究现状,可以了解到,由于起重机是一种比较大型且结构复杂的设备,即包含机械部件,又有电器控制元件,因此,起重机的智能化技术的研究方向比较多元化,但总的来说,都是以实现工作环境自动识别、自动规划作业轨迹、自动避障、远程监控、故障诊断报警等智能化技术为目的的,并最终使起重机设备具备自动规划、全面感知、多机协同和决策控制等能力。例如,为了实现多机协同作业,就需要对远程监控技术进行研究,以实现对多台起重機进行监测和控制,使其能够协同作业;为了提高起重作业的安全性,就需要对起重机的环境识别能力和安全保护系统进行研究,使其根据周围工作环境自动调整动作指令,从而大大降低起重机设备的故障率以及人员伤亡事故的发生率。
通过对起重机的智能化技术专利的分析研究,虽然不同企业、大专院校及科研机构等对该技术的重点研究方向不同,但对多机协同作业技术的研究还比较少,由于工程项目中吊装的物件越来越朝着大型化发展,单台起重机的吊装能力已很难满足吊装要求,使用多台起重机协同作业的需求也相对增加,因此,今后还需进一步加强对多机智能化协同作业的研究,例如,可以使用检测技术实时监测多台起重机的工作参数,同时使用无线通讯技术和监控终端操控多台起重机的精准动作,以实现多台起重机的协同控制功能。
参考文献:
[1] 王建革.起重机现状及发展趋势[J].科技信息,2014(13):161.
[2] 陈志梅,孟文俊.智能起重机的体系结构[J].起重运输机械,2011(01):1-4.
[3] 刘军.智能无人起重机设备发展及相关问题[J].中国化工贸易,2013,12(24):27-28.
[4] 陈向东.起重机智能化技术的新亮点[J].工程机械与维修,2017(05):34-35.
[5] 屈云岚.桥式起重机吊物的空间自动运移路径规划研究[D].大连:大连理工大学,2018.
