大跨径悬索桥主缆高程测量方法分析
2020-09-23熊梓宇
熊梓宇
(长沙理工大学土木工程学院,湖南 长沙410114)
悬索桥主缆高程测量是主缆架设中较关键环节,通常采用精密三角高程方法[1]进行。常规三角高程测量方法有三种[2],因全站仪无法在索股上架设,所以在实际测量中无法使用全站仪对向观测法。实际测量悬索桥边跨主缆高程时,广泛采用单向观测法。该方法易受到猫道护栏、猫道门架等等猫道设施的影响干扰观测视线,至测量困难。使用小棱镜加长杆不仅水平气泡不易对中,且在索股上安装设备时存在安全隐患。遇此情况,若地形条件满足中间观测法要求,可使用中间观测法。为测量悬索桥边跨主缆高程,本文基于三角高程测量方法原理,进行中误差理论计算,并以重庆长寿长江二桥边跨主缆高程测量为研究背景,甄别两种测量方法的区别。
1 全站仪三角高程测量法及理论
1.1 全站仪单向观测法
设A 点为设站点,高程已知,仪器高为i;B 点为棱镜放置点,为待测高程点,棱镜高为ν。由图1 可得出两点的高差公式:

式中,HAB为A、B 两点的高差;S 为A、B 两点之间的斜距;α 为A、B 两点之间的竖直角;c 为地球曲率改正值;r 为大气折光系数改正值。[3-4]:
因此,全站仪三角高程单向观测法高差计算公式为[3-4]:

式中,D 为A、B 两点之间的平距;R 为地球半径;K 为大气折光数。其他参数含义同前。

图1 全站仪单向观测原理图
1.2 全站仪中间设站观测法
全站仪中间设站观测法是在待测点和已知高程点之间放置仪器,利用全站仪三角高程测量原理求出待测点与已知高程点的高差,并通过已知点高程推算待测点高程。如图2 所示,已知后视点和装设棱镜头,分别测量两棱镜高度νA和νB;在两点大约中间位置G 点放置全站仪,测量A、B 两点中间的高差。图2 中D1和D2以及S1和S2分别为全站仪到A 点和B 点的平距和斜距;α1和α2分别为全站仪放置点G 点至A、B 两点的竖直角度;AB 两点之间的两差改正数为r1和r2以及c1和c2。根据全站仪三角高程测量原理,G 点到A 点的h1计算公式为:

式中:K1和K2为全站仪放置G 点到两测点的大气折光数,R 为地球半径。此因该方法无需测量仪器高度,可得A、B 两点高差公式为:

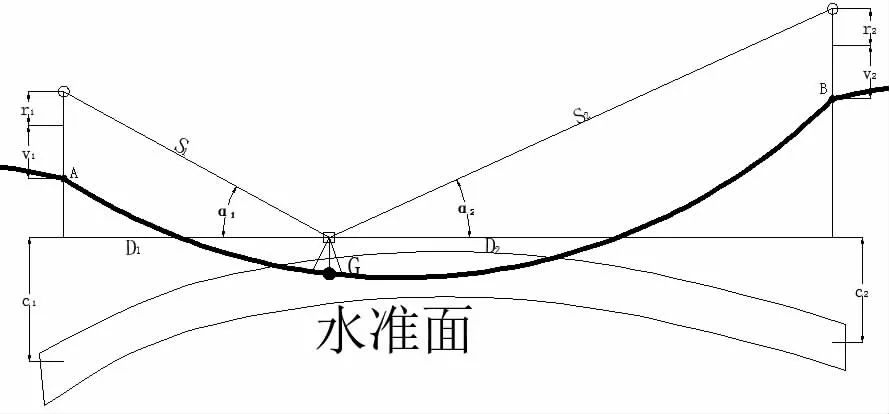
图2 全站仪中间设站观测法原理图
2 两种测高法精度分析
2.1 全站仪三角高程单向测法的中误差计算以及公式
由误差传播定律表达式[5]对式(2)进行微分变式推导得到全站仪三角高程单向观测法中误差计算公式:

2.2 全站仪三角高程中间自由设站法中误差计算以及公式
同理,利用式(10)对式(9)进行微分变式推导,得到全站仪中间设站观测法中误差计算公式:

式中,ms1和ms1分别为G 点到A、B 两点的斜距中误差;mα1和mα2分别为G 点到A、B 两点的竖直角测角中误差;mk1和mk2分别为G 点到A、B 两点的大气折光系数测量值中误差;mv1和mv2分别为A、B 两点棱镜高度取值中误差,其余符其他参数同前。使用中间自由设站法时,因同地点测量且短时间内观测条件相差不大,一般K 值变化不明显[6]。于是令K1=K2,mk1=mk2=mk。式(9)可修改为:

2.3 假定条件下理论精度对比
为分析两种测量方法的精度,以徕卡全站仪TS09 plus 为例。徕卡全站仪TS09 plus 测角精度mα=2'';测距精度为ms=±(1.5+2×10-6×D)mm,此文中取ms=±3.5mm。按已知高程点到待测点之间测距长度100m~1000m 为例,大气折光系数误差约为0.03~0.05[7],本文拟取K 值为±0.04mm[2],仪器高量取误差为mi=±1mm,棱镜杆因为有刻度量取误差小,凭经验取mv=±1mm。单向观测法计算以已知高程点到待测点之间距离为100m~600m,竖直角角度取5°~30°计算,计算结果如表1 所示。

表1 单向观测法测高理论中误差
当总平距为100m 时,中间自由设站法前后视相等距离,均为50m;总平距大于100m 时,中间自由设站法后视点距全站仪依次为100m、200m、300m,竖直角度α1、α2取5°~30°,计算结果如表2 所示。
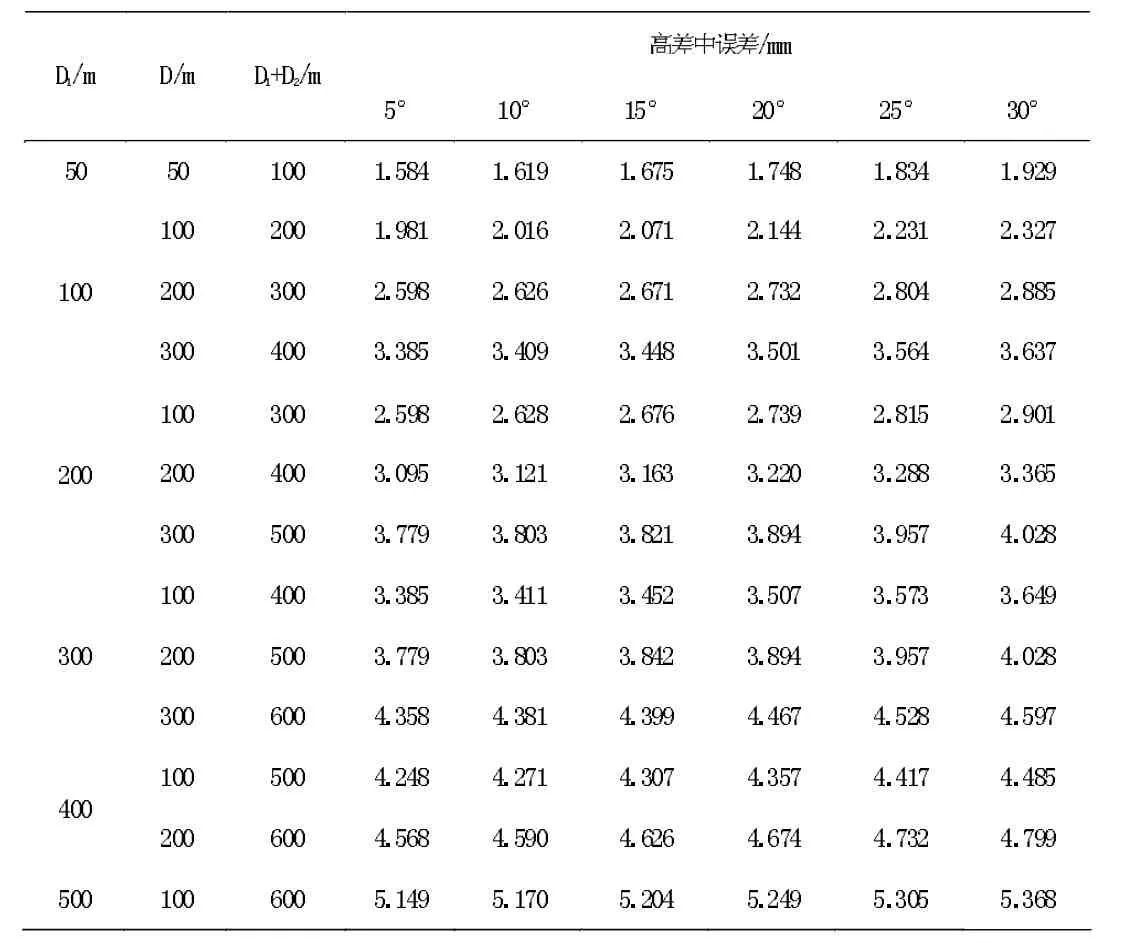
表2 中间自由设站法测高理论中误差
综上可得:
(1)在测量平距相同时,中间设站法受竖直角度影响较大。
(2)两种方法竖直角产生的误差与测量平距呈负相关。
(3)中间站法前后视距离相差越大,则测量误差越大;前后视距相等,精度最高。
(4)测量平距小于100m,当竖直角度小于25°时,中间自由设站法较为精准;当竖直角为25°~30°之间,两种方法中误差近似;当竖直角大于30°,中间自由设站法其精度将低于单向观测法。
(5)测量总平距相等且大于100m,竖直角在30°以内,中间设站法测高精度高于单向观测法。
3 实测边跨主缆应用
3.1 工程概况

图3 重庆某悬索桥边跨立面图
重庆某长寿长江二桥边跨跨径为235m,空缆状态下,边跨垂度为7.448m,垂跨比约为1:31,边跨无吊索,线型为悬链线。单根索股设计长度1280.386~1281.651m。
3.2 测量准备
为比较两种方法测量精度,进行以下准备工作:
(1)选择风速合适的阴天,采用热电偶温度测试仪测试索股温度,确保索股温度稳定,不因风荷载晃动。
(2) 取带有定位桩柱的已知高程点NT1,其施工里程2136.449m ,偏距181.592 m,高程278.843m 。
(3)为提高测量精度,采用中间法测量时,后视点采取带基座对中器的棱镜;两种方法实测索股标记点时,均采用装有水平气泡的徕卡迷你小棱镜。
(4)单向观测法实测时,全站仪放置于有定位墩的NT1 点,中间设站法实测时,全站仪放置于NT1 与索股标记点中间B点。
3.3 实测值中误差计算公式
拟采用标准差衡量两种方法的测量精度。因实测中无法进行无限次观测,故采取有限观测中误差衡量观测精度。求解实测中误差时,又因无法得知观测对象的真实坐标,采用观测值的算术平均值计算公式以及观测值改正值计算公式[1]:

式中,x 是最或然值;l0为最平均值;Δl 为有限次实测值与最平均值的差值的和;n 为观测次数,m 为观测值中误差;v 为改正值。
3.4 测量结果
完成准备工作后开始进行主缆索股标高实测,测点、设站位置如图4 所示。
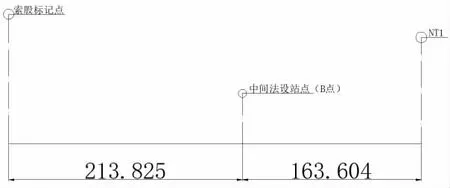
图4 点位及设站立面布置图/m
两种方法测量结果及中误差如表3、表4 所示。

表3 单向观测法实测改正值中误差
由表3、表4 可知,中间设站法和单向观测法实测中误差分别为±2.897mm、±3.705mm,中间设站法结果更精确。本次采用中间设站法,所选中间点位置距离前后视距相差不大,前后视竖直角度大致相同且均不超过20°,又因地球曲率和大气折光影响较小,不用量取仪高,与单向观测法相比无仪高量取误差。虽存在两倍棱镜高量取误差,但采用带基座对中器棱镜,棱镜读取误差比全站仪仪高量取误差低。
4 结论
4.1 利用全站仪测量悬索桥边跨主缆高程时,随测量距离增大、测量竖直角度上升,测量平距≤100m 时;当竖直角度<20°时,中间设站法精度高;当竖直角度在20°~25°时,单向观测法精度高;当测量平距>100m 时、竖直角度<30°时,中间设站法精度高;两种方法中误差与测量平距呈正相关。
4.2 实测时,应综合考虑竖直角度和测量平距的影响,选择精度较高的方法。
4.3 两种方法均受棱镜高度读取精度的影响,中间设站法产生的误差是单向观测法的两倍,因此提高棱镜高度读取精度可有效降低测量误差。
4.4 采用中间设站法可灵活选择观测位置,待测点和已知点不需通视,不需测量仪高,与单向观测法相比,测量效率高,优势明显。
