基于工业组态技术的潮汐车道监控系统
2020-09-21路云阳张文静商泽坤张静之张志雄
路云阳 张文静 商泽坤 张静之 张志雄

摘 要:本文针对一种“基于工业组态技术的潮汐车道监控系统”的开发设置过程进行剖析,包括系统软硬件要求、系统监控界面的开发、系统的通讯设置、系统的串口设置和系统的数据库词典设置等内容,提供了一种解决高速路段道路车道分配与车流量匹配和高速路出入口路段管理的方案。经过在模型装置上调试运行,可以实现远程监视和运行控功能。
关键词:潮汐车道 组态监控 组态技术 远程监控
中图分类号:TP274 文献标识码:A 文章编号:1674-098X(2020)06(c)-0071-02
“基于工业组态技术的潮汐车道监控系统”提供了一种潮汐可变车道控制装置,解决现在高速路不同时段来往方向车道车流量不平衡,以及高速路出入口路段管理不合理的问题。
1 “基于工业组态技术的潮汐车道监控系统”软硬件要求
“基于工业组态技术的潮汐车道监控系统”采用三菱可编程序控制器和“组态王”工业组态监控软件开发的。软件要求:Win2000/WinNT4.0(补丁6)/WinXP简体中文版/Win7;组态王6.53版本;PLC-GX Developer软件。硬件要求:奔腾PIII500以上IBM PC或兼容机;最少64MB,推荐128MB内存;VGA、SVGA或支持桌面操作系统的任何图形适配器,要求最少显示256色;RS-232C通讯;三菱FX2N-32MR可编程序控制器;“潮汐车道组态监控及其控制”模型。
2 “基于工业组态技术的潮汐车道监控系统”的实现设置
2.1 系统监控界面的开发
“基于工业组态技术的潮汐车道监控系统”的监控功能的开发内容包括:监控画面的设计开发、组态王与PLC的通信设置、通讯数据设定、建立监控系统的数据库词典等。“基于工业组态技术的潮汐车道监控系统”监控界面如图1所示。界面的左边是实现对潮汐车道实际运行情况的监视功能;监控界面的右边是实现远程控制和远程调试功能区。
2.2 系统的通讯设置
假设仿真PLC连接在计算机的COM3,在主开发界面左侧的菜单中选择选项中的“设备”,然后在工程浏览器右侧双击“新建”图标,即可弹出“设备配置向导”对话框,按照提示项选择“三菱PLC”,“FX2编程口”,“COM3串口”,即可完成通讯设置。
2.3 系统的串口设置
在主开发界面左側的菜单中选择选项中的“设备”下,找到“COM3”并双击,进入如图2所示的串口设置界面,将数据位从“8”调整到“7”。
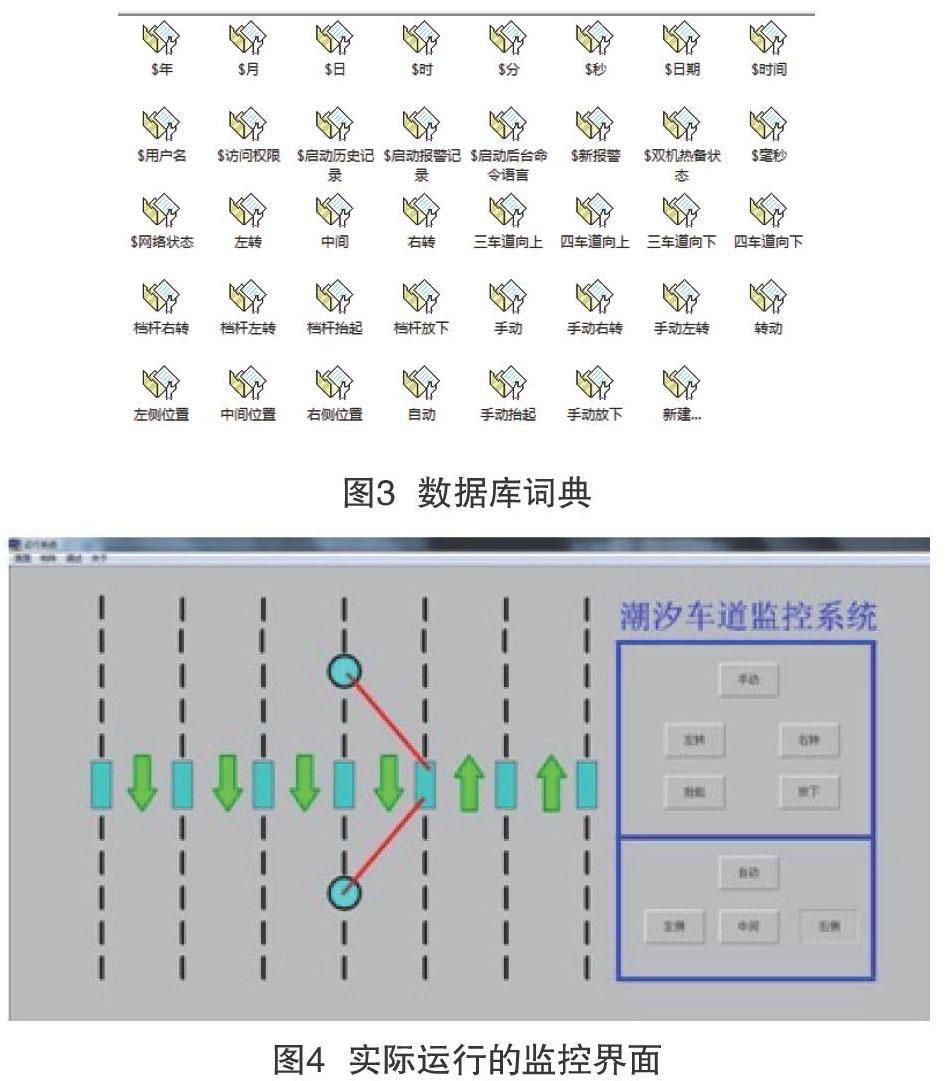
2.4 系统的数据库词典
建立监控系统的数据库词典如图3所示。完成相应的动画链接后,就可以运行监控系统了。
3 “基于工业组态技术的潮汐车道监控系统”的运行
如图4所示为“基于工业组态技术的潮汐车道监控系统”实际运行的界面,该监控系统控制区域分为手动和自动两种。自动状态下,点击“左侧”、“中间”和“右侧”选项按钮,隔离杆会相应的动作,改变来去车道;手动状态下:分别点击“左转”、“右转”“抬起”和“放下”选项按钮,控制抬杆的电动机会实现左转、右转、抬起和放下的动作。
参考文献
[1] 张静之,余粟,章伟,等.智能车库车行引导系统实践教学装置的研发[J].实验室研究与探索,2018,37(5):54-57+73.
[2] 邵明忠,周宇星,张泽河,等.基于PLC的车库车位辅助停车装置[J].数字技术与应用,2016(6):17-18.
[3] 张静之,吉明明,余粟.创新实践类课程《组态监控系统综合实践》的教学探索与实践[J].科技创新导报,2019,16(10):240-241.
[4] 于超. 基于组态的工业监控系统设计[J]. 数码世界, 2017, 000(004):120-121.
