矿用刮板输送机的模糊PID控制调直方法研究
2020-09-19吴新佳
吴新佳
(郑州铁路职业技术学院机电工程学院 河南 郑州 450052)
采矿过程中的矿用刮板输送机与采矿机械需要密切配合,其直线度偏差过大不仅加剧综采设备运行所需的能耗,同时当偏差程度过大时,会存在链条卡死、断裂的风险[1-3]。故保证刮板机直线度对于工作面安全、高效作业有着积极作用。
按偏差的比例(P)、积分(I)和微分(D)进行控制的PID(Proportion Integration Differentiation)控制器是一种自动控制器,其在矿业工程、电子科学、农业工程等领域有着广泛的应用[4-6]。Ines等将PID控制方法应用于旋回破碎机的给料率、转速,最终对两者进行了精确控制,实现了高效低耗的破矿目标[7]。Ki⁃ran等通过EDEM发现磨机给料率与生产率为非线性关系,利用Caps GNN建立磨机的数学模型,对其磨机的生产率进行预测,通过模糊PID算法对不同工况条件下磨机给料率进行了调节[8]。Anastasia等将Fluent与PID算法融合,分析了不同湿度情况下破矿时矿物的破碎键数目变化情况,从而对破碎机的转速进行实时调整[9]。本研究通过建立模糊PID模型。将中部槽连接耳处空隙误差与各段矿用刮板输送机之间通过哑铃销连接的误差结合,由数学模型计算出各液压支架对刮板机进行推溜所需要的流量,通过模糊算法对PID的输出进行融合计算,以期实现模糊PID模型对液压缸工作时间的控制,达到矿用刮板输送机调直的效果,为综采面的全面自动化提供前期研究,并降低因刮板机直线度偏差过大造成的事故率。
1 矿用刮板输送机姿态计算
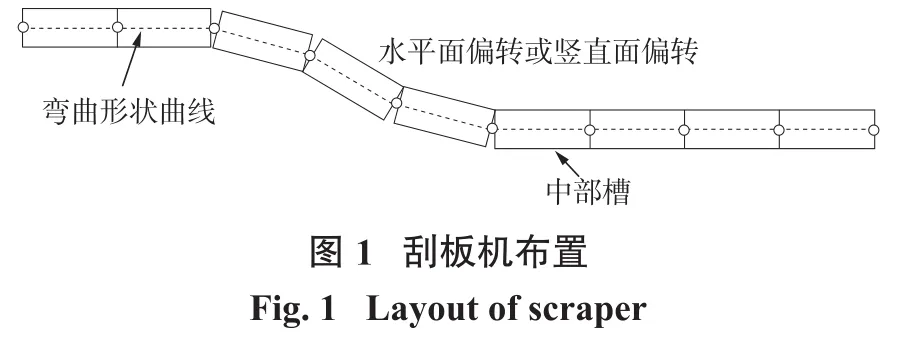
本研究提出将每段矿用刮板输送机刮板的正中间位置按照采矿机械行走方向进行连接,用来表征其弯曲程度,见图1。
由于采矿机械的运动轨迹与刮板机的布置相互重合[10],因此需要将所采集到的采矿机械三维坐标解析到绝对坐标系下,刮板机在x、y、z方向下的转动角度分别记为α、β、γ,其归总为角度总变化λ=[λ1,λ2,λ3]T。则当前时刻n的λ与其之间的关系为
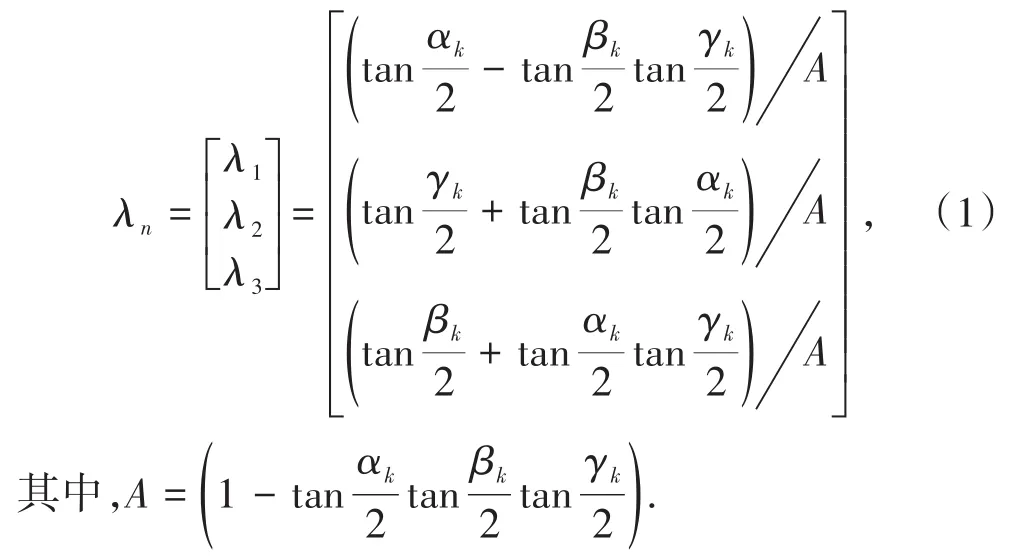
上式结合Rodrigues算法实时对矿用刮板输送机当前布置角度开展解析计算[11-13]。
推杆在对矿用刮板输送机产生推动时,由于其作用在输送机中部槽,以及相邻刮板机之间通过哑铃销连接[14-17]。在推移的过程中,相对于矿用刮板输送机中部点S,矿用刮板输送机运行方向(T)与竖直方向的角度偏差(Z)可表达为
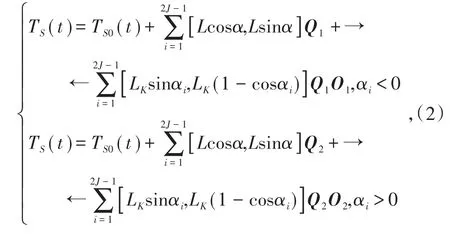
式中,J表示为当前作用的刮板机总节数;L为单位刮板机长度LK矿用刮板输送机运行方向的偏离程度;SK为刮板机竖直方向偏离程度;α为x方向下的转动角,β为y方向下的转动角,αi为x方向下的转动角的相对偏差,βi为y方向下的转动角的相对偏差。
造成刮板机在液压支架作用下产生直线偏差的原因主要为连接耳处空隙造成的误差,以及各段矿用刮板输送机之间通过哑铃销连接产生的误差,对单一段刮板机进行推溜会造成其他段刮板机的连锁运动。
2 模糊PID算法对刮板机的调直研究
从上文研究中得知液压支架对中部槽位置施力,因此需要其所移动的距离。由于刮板机在通常情况下需要调整到直线,则第n个连接耳可表达为

式中,INT[]为VFP数值函数的一种,是将一个要取整的实数(可以为数学表达式)向下取整为最接近的整数;LD与L分别表示当前段刮板机长度与总长度。
则刮板机在工作面前进方向下的移动量Ln可表示为

式中,ΔLn与分别表示移动前后刮板机侧板所在位置。
本研究所建立的模糊PID模型结果如图2。以刮板机的水平偏差为基础,与中部槽连接耳处空隙误差、各段矿用刮板输送机之间通过哑铃销连接的误差结合,通过补偿计算,再结合相关数学模型计算出各液压支架对刮板机进行推溜所需要的流量L0,通过模糊算法对PID的比例调节系数kp0、积分调节系数ki0、微分调节系数kd0进行计算,之后PID的输出对液压系统的供液量L1进行控制,这部分流量即作为实际的流量作用于刮板机上,又作为这个控制系统的流量反馈值,得出流量误差E、误差变化率EC。
采用直接插标法,设置控制器的输入与输出分别为{IB、IM、IS、ZE、OS、OM、OB},输入的取值范围分别如下,控制器参数的增量分别为Δkp:[-3,3];Δki:[-0.6,0.6];Δkd:[-3,3]。控制器误差E:[-3,3]。控制器误差变化率EC:[-12,12]。误差量化因子λE=6÷ 3=2。误差变化率量化因子λEC=6÷ 12=0.5。参数的增量的比例因子分别为λp=3÷6=0.5;λi=3 ÷ 6=0.5;λd=3 ÷ 6=0.5。
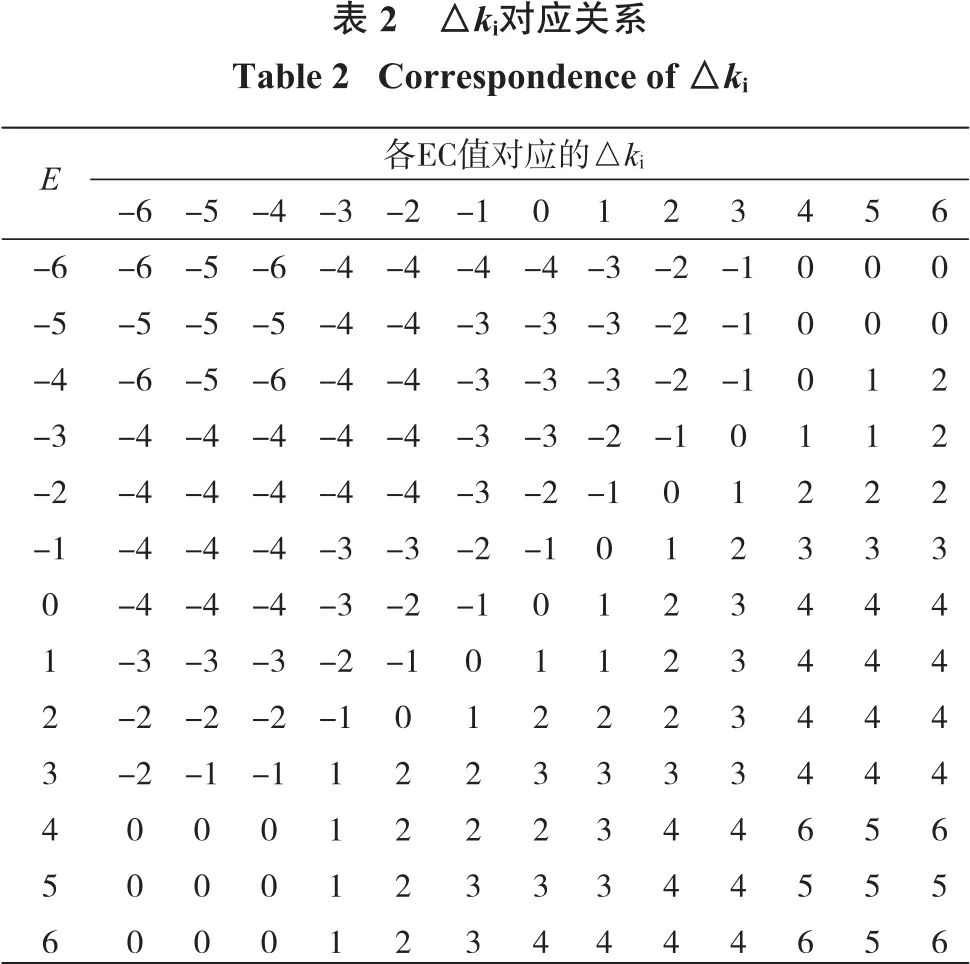
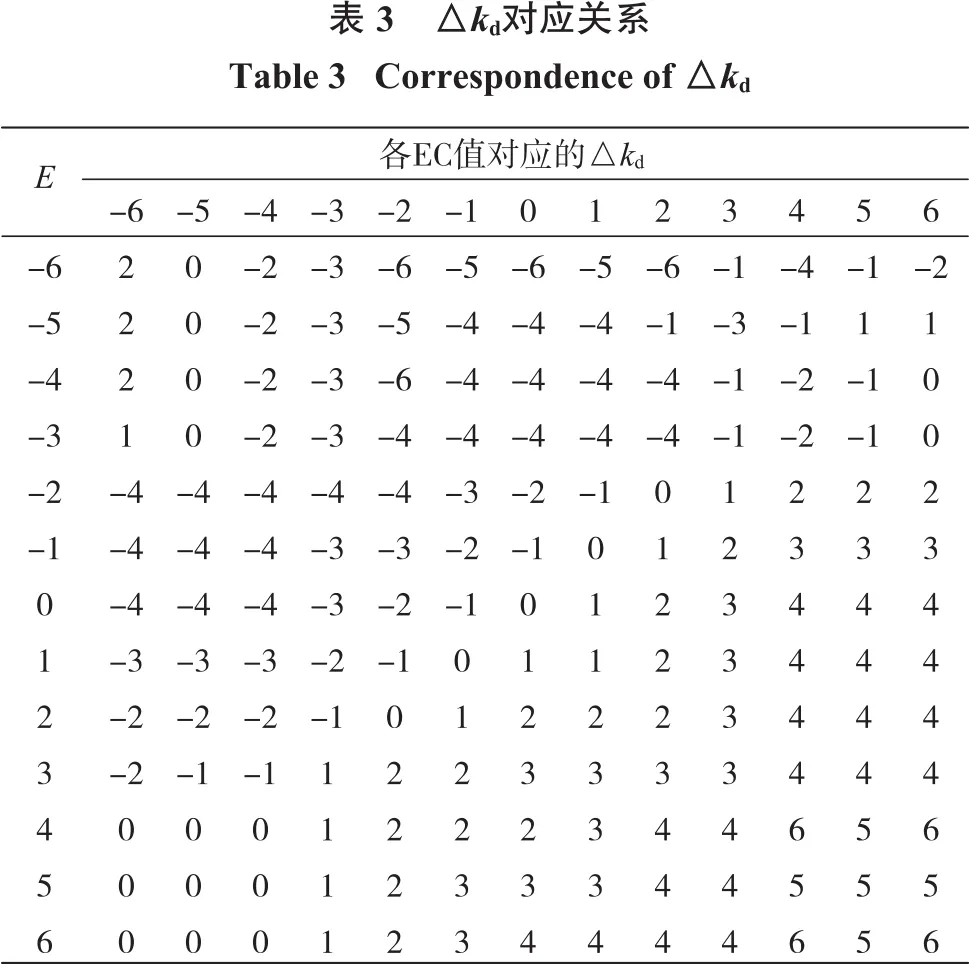
输入E、EC以及各个输出的增量Δkp、Δki、Δkd之间的关系如下(表1、表2、表3)。
通过上表确定 Δkp、Δki、Δkd的取值,并结合kp、ki、kd液压支架对刮板机的作用时间。
在MATLAB 2018a平台基础上进行仿真研究,仿真的思路如图3。
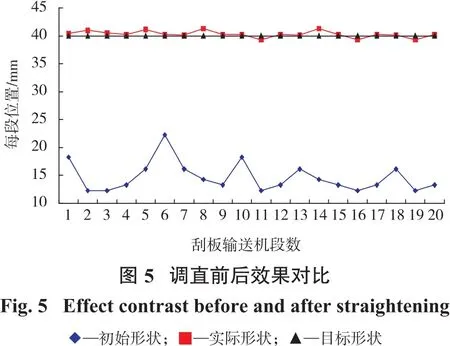
在MATLAB 2018a的仿真中设施刮板机总长度为20 m,每段长度为1 m,PID中kp=30、ki=19、kd=8[18-20],同时为直观观察调直结果在 LMS-Samtech 进行仿真,最终获得调直前后几何仿真模型(截取部分)与折线图(图4、图5)。
从图5可以发现,针对刮板机局部的调直效果较好,针对矿用刮板输送机总体来说,当其目标位置均为40 mm,通过模糊PID可以较好地将刮板机调整到40 mm附近。
3 试验分析
通过Visual Studio对系统的显示界面、操作界面、通信模块进行设计,执行部件通过PLC S7-200控制器进行编程(图6),实现数据的获取、模糊PID的实现等功能。最终刮板机调直的效果如图7(重复8次试验)。每次试验与目标形状的平均偏差见表4。


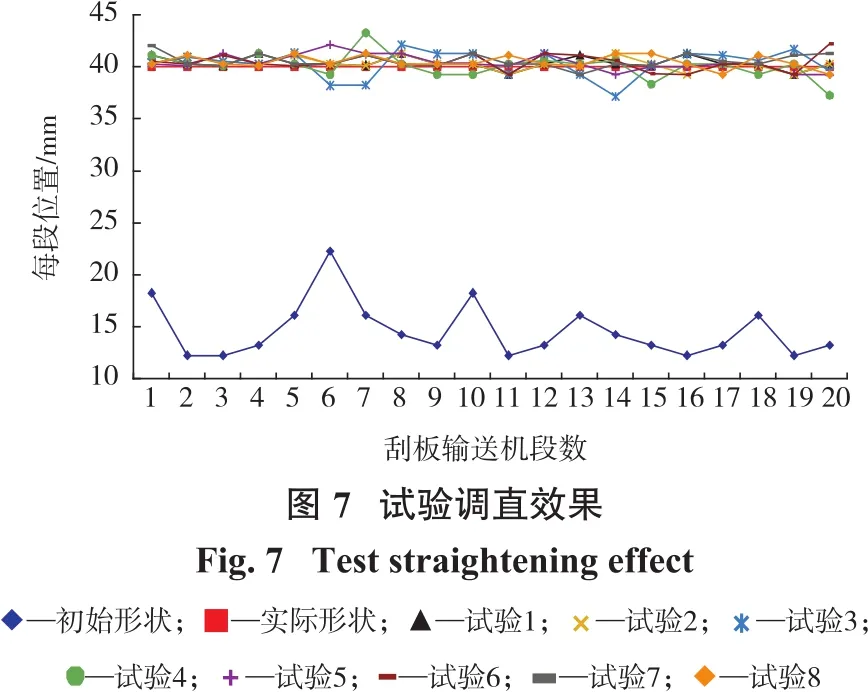
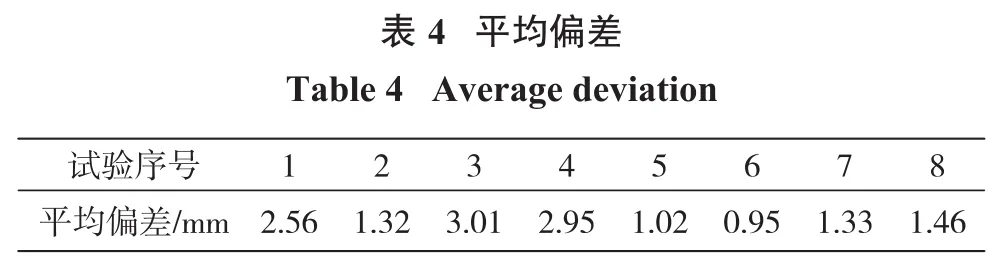
可以发现,除了在试验3中的第14段,试验4中的第6段,8次试验中20段矿用刮板输送机形状均在目标形状附近浮动,且所有试验中的平均偏差均较小。因此,证明了本研究中的模糊PID算法较好地实现了矿用刮板输送机的调直效果。
4 结论
(1)提出了矿用刮板输送机姿态角度与形态解析算法。
(2)建立了模糊PID模型。将中部槽连接耳处空隙误差与各段矿用刮板输送机之间通过哑铃销连接的误差结合,结合数学模型计算出各液压支架对刮板机进行推溜所需要的流量,通过模糊算法对PID的输出进行融合计算,最终通过模糊PID模型对液压缸工作时间进行调节。并通过MATLAB 2018a与LMSSamtech验证了调直效果。
(3)由试验证明了本研究中的模糊PID算法以及研究过程较好地实现了矿用刮板输送机的调直效果。