机器人辅助手术系统术前规划研究进展
2020-09-18张阳,杨景,闻志
张 阳,杨 景,闻 志
(浙江理工大学机械与自动控制学院机电产品可靠性分析与测试国家地方联合工程研究中心,杭州 310018)
0 引言
近年来,机器人辅助手术系统快速发展,其在精准化外科手术中也逐渐发挥出重要的作用[1-3]。机器人辅助手术系统是基于临床医学、控制技术、工程技术等多学科交叉融合的新技术[4],具有广阔的应用前景[5-6]。典型的机器人辅助手术系统主要有AESOP手术机器人[7]、Zeus手术机器人[8]、达芬奇手术机器人[9]等。智能化、精准化医疗作为外科手术未来的发展趋势,对机器人辅助手术系统提出了更高的要求[10]。术前规划作为手术前的重要准备工作,为机器人辅助手术系统提供初始参数,是提高手术精准性和成功率的重要保证。欠缺合理性的术前规划将影响手术机器人执行手术操作的路径、位置以及手术切口的选择,容易造成手术视野差、机器人可操作性差等问题,影响手术的顺利进行,甚至可能会造成误伤操作、并发症或医患纠纷等不良影响[11-13]。
本文对为术前规划提供必要信息的三维重建技术和手术导航技术为主的术前规划辅助技术及决定术前机器人辅助手术系统初始参数的术前规划技术进行综述,探讨机器人辅助手术系统术前规划目前的研究热点和典型研究成果,并进行总结和展望,以期更深入地研究机器人辅助手术系统术前规划技术,为机器人辅助手术提供更加合理的规划结果。
1 术前规划概况
传统的术前规划是指在手术前医生通过病灶的医学图像信息进行包括手术流程、手术切口位置等在内的手术方案规划[14]。在传统的术前规划方法中,病灶的位姿信息估计依赖于术者的临床经验,精度较差、手术成功率不高[15]。医学影像技术和计算机技术以及其他辅助技术的快速发展,为机器人辅助手术系统的精准术前规划提供了基础,手术医生在术前可通过CT等医学图像获得病灶处位置(如心脏手术中的搭桥走向、关节手术的骨骼位置等)、术中可能遇到的困难等信息数据[16]。机器人辅助手术系统术前规划能够通过准确的数字化图像获取病灶位姿信息,在此基础上利用机器人学理论对手术多臂系统的术前初始摆位进行规划[17]。
2 机器人辅助手术系统术前规划辅助技术研究
患者的病灶信息作为手术医生进行机器人辅助手术系统术前规划的重要数据,其获取方式主要是通过不同的辅助技术协助实现,包括三维重建技术和手术导航技术等[18-19]。
2.1 三维重建技术
三维重建技术是在20世纪后期兴起的技术,能够直观地呈现人体组织或者器官影像,为手术医生提供直观的病理特征和数据[20]。医学影像是三维重建的数据来源,目前临床上应用较多的成像技术主要有CT成像技术[21]、光学相干层析成像技术[22]、超声成像技术[23]和MRI成像技术[24]等。三维重建技术分为面绘制[25]和体绘制[26]两大类。面绘制和体绘制的相同之处在于两者均是可视化数据,区别在于面绘制得到的是三角剖分模型,而体绘制可以直接观察内部组织、器官,方便手术医生直观地观察组织信息。
面绘制是通过曲面造型技术重建等值面,但不能反映绘制对象的整体,容易丢失细节,重建的模型精度较差。Lorensen等[27]提出的移动立方体算法(marching cubes)是用线性插值求出等值面的三角剖分,并给出三角剖分拓扑图(如图1所示)。Tao等[28]提出的移动四面体算法(marching tetrahedra)是一种基于体积数据的快速等值面提取技术。Schroeder等[29]提出的Flying edges算法是基于并行运算的高性能可扩展的等值面提取算法,能够避免不必要的计算,在一定程度上提高了效率。
体绘制通过绘制对象的原始立体数据得到直观的3D渲染图像,细节较丰富。Levoy等[30]提出的光线投射算法(ray casting)是目前应用最多的体绘制算法。Dachille等[31]提出了一种用于体积数据集的高质量渲染方法,速度更快,且支持交互式分类。Roettger等[32]研究的溅射法将每个体素看作局部核心,映射到二维平面。Lacroute[33]研究的错切-变形体绘制算法根据三维视觉变换理论,将绘制过程拆分成三维错切变换与二维变形变换,是较为快速的方法。
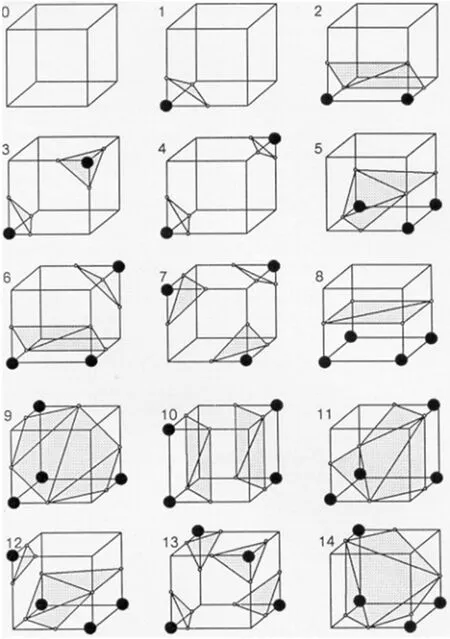
图1 移动立方体算法三角剖分拓扑图[27]
三维重建技术的应用,将病灶图像中的二维信息转换为三维的可视化数字信息,为手术医生提供了更精确的术前规划数据。很多学者针对三维重建技术也展开了研究。Chiu等[34]较早运用三维影像开展心脏手术的术前规划。Coste-Manière等[35]综合面绘制和体绘制进行术前规划,指导手术方案。Fang等[36]在肝内结石手术前使用CT进行扫描,建立组织模型,得到更为客观和完整的数据。谢于等[37]通过可视化影像在术前规划时提前预警手术医生注意动脉走行,避免误判。贾晨尧等[38]对比CT和CT血管造影(CT angiography,CTA)图像,发现基于CT的可视化肾脏三维重建模型可以简化手术难度、缩短手术时间和减少并发症。雷静桃等[39]综述了机器人辅助膝关节置换术的术前规划,根据膝关节的CT或MRI扫描图像,基于逆向工程技术重建患膝的三维数字化模型。方驰华等[40]介绍了虚拟现实、3D打印等新技术在巨块型肝脏肿瘤手术术前规划的应用,这些技术能够为手术医生提供更加直观的病灶区域信息,利于提高术前规划的效果。Yoshii等[41]研发了用于术前规划的3D骨合成图像融合系统,提高了术前规划的精准性。
2.2 手术导航技术
手术导航技术能够为医生提供精准病灶位置信息,为术前规划提供目标区域,并引导实施手术规划方案,提高术前规划合理性。因此,手术导航是术前规划的重要部分。手术导航技术中的定位技术对于精准定位病灶具有关键作用,以下重点论述空间定位技术和增强现实(augmented reality,AR)技术[42-43]。
2.2.1 空间定位技术
根据传感器的不同,空间定位方式可分为机械定位、超声定位、电磁定位和光学定位4类[44]。其中机械定位是接触式空间定位技术,超声定位、电磁定位和光学定位是非接触式空间定位技术。
(1)机械定位。机械定位发展较早,包括框架式机械定位和无框架式机械定位2种。其中,框架式机械定位是通过固定患者,结合图像和标记点进行配准,从而获得映射关系。其优点是定位精度高,但体积较大且操作不便,容易对患者造成创伤。无框架式机械定位通过记录机械臂对应的空间关节向量计算末端点位置,优点是使用方便,不影响手术区域,但定位精度较差,如加拿大ISG Technology公司的Viewing Wand[45]。
(2)超声定位。超声定位通过采用超声测距原理来确定空间位置,具有成本低的优点,但定位精度不稳定、适用范围小,如挪威MISON AS研制的SonoWand 导航系统[46]。
(3)电磁定位。电磁定位通过3个磁场发生器间的相对位置以及探测器监测到的信号来计算探测器目标的位置和方向,优点是成本较低、便携性强、操作简单,但定位精度较差[47]。
(4)光学定位。光学定位通过光学三角测量技术,由计算机重建目标空间位置,常采用双目和多目相机,具有使用方便、价格低廉、定位精度高、不易受手术环境干扰等优点,是最具前景的手术空间定位技术[48]。
2.2.2 AR技术
近年来,AR技术逐渐应用到临床手术中,提高了手术的可操作性和精准性。AR技术是指叠加物理信息(视觉、声觉、触觉等),通过计算机、光学等技术,融合计算机产生的虚拟物体或其他信息以及真实环境,将虚拟信息与真实世界结合,从而达到超越现实的感官体验,具有辅助手术医生进行精准靶点定位、扩大手术视野的优势,已逐步应用到脑外科、神经外科、耳鼻喉科等临床手术中[49]。
采用AR技术的手术导航系统具有虚实融合、精确定位、实时交互3个特点[50]。AR的三大关键技术包括显示技术、标定技术和智能交互技术,能够为手术医生提供直观的交互操作,以实现对不同术前规划结果的手术操作模拟和术前规划方案的优化,可以让手术医生从中选择较优的规划方案。Okamoto等[51]在腺体切除手术中结合AR技术实现对手术切除区域的更精确规划,提高了目标切除精度。Cabrilo等[52]利用AR技术进行内窥镜心脏搭桥手术,提高了手术效率。Edgcumbe等[53]采用AR技术开展腹腔镜部分肾切除术,最大限度保留了非癌变肾脏部分,提高了手术效果。
目前针对病灶区域的准确定位及病灶边界的精确划分是实现精准手术亟待解决的问题,也是影响手术效果的一个重要因素。虚拟现实技术的应用进一步拓展了解决以上问题的思路,结合计算机技术等有望实现更加精准的病灶区域处理。
3 机器人辅助手术系统术前规划研究
在三维重建技术和手术导航技术的基础上,对于机器人辅助微创手术,还需要确定合理的手术切口位置,对手术系统多条机械臂的初始摆位进行规划。
3.1 手术切口位置规划
针对微创手术,在术前规划阶段需要确定在人体进行手术切口的位置(如图2所示)[17],通常是将3~4个8或10 mm的切口作为手术器械的插入口,即手术机械臂远心点的位置。

图2 手术切口位置示意图[17]
手术切口位置会影响术中手术视野、手术器械的操作区域等,不合理的切口容易导致术中手术机器人的二次调整。Cannon等[54]提出了一种自动化方法,旨在最小化手术机器人和内窥镜夹角与理想角度之间的偏差,提高了解剖速度且创伤更小。Pick等[55]针对达芬奇手术机器人研究了前列腺手术切口位置,给出机械臂摆放的最佳区域位置。
Ferzli等[56]提出一套根据目标器官位置、手术医生操作习惯等决定手术切口位置分布的标准化方法(如图3所示),该方法是在经验基础上通过总结得到的手术切口的布置方法,具有一定的实用性,但没有考虑到手术操作过程中手术机械臂之间的运动情况,有一定局限性。Du等[57]以穿过手术目标区域几何中心的法向量作为视野的最佳方向,在此约束条件基础上利用智能优化算法得到最优的手术切口位置(如图4所示),能够较好地保证手术过程中的视野条件,实现良好的术前规划效果。Bauernschmitt等[58]建立了一个术前规划仿真系统(如图5所示),利用CT重建模型并定义感兴趣区域,通过规划手术切口的位置来对可达性、器械之间的碰撞以及器械与组织间的碰撞进行可视化仿真。Hayashibe等[59]设计了在术前通过套管针部位的运动学约束和手术机器人的逆向运动来模拟手术机器人的仿真系统(如图6所示)来研究手术切口位置布置,依靠有限次尝试能得到相对较优的结果。

图3 Ferzli等[56]针对部分腹腔手术的切口布置

图4 Du等[57]提出的手术切口布置

图 5 Bauernschmitt等[58]建立的术前规划仿真系统

图6 Hayashibe等[59]设计的手术机器人术前规划仿真系统及应用
3.2 机器人的初始摆位研究
机器人的初始摆位位置影响手术的可达性、操作性等。Adhami等[60]将术前规划的手术切口位置规划和机械臂的初始摆位划为2个独立的过程,基于多个评价指标得到机械臂的最优初始摆位。Azimian等[61]提出一种针对特定患者心脏手术的机器人辅助微创手术术前规划算法,该算法考虑机器人运动学、患者特异性胸部解剖学和特定的术中条件。杨景等[17]提出一种多目标术前规划优化算法,结合给定的一组病灶参数阐述算法的实现流程,通过该算法得到在该病灶参数下最优的手术机械臂摆位角度,以保证持械臂在腹腔内有足够的协作空间的基础上尽可能地避免运动干涉。
Yu等[62]基于梯度投影法研究持械臂的术前摆位,以持械臂控制点之间的投影距离及面积、末端协作空间为优化指标对被动关节的摆位角度进行优化(如图7所示)。马如奇等[63]利用双持械臂的封闭逆解对传统梯度投影方法进行改进,并通过仿真验证其有效性。闫志远团队[64-67]将手术机械臂的运动性能考虑到术前规划过程中,并将手术区域划分为权值不同的多个子区域,以区域内的单臂灵巧度指标和多臂的协作指标作为优化目标,基于智能优化算法对手术切口的位置及摆位角度进行了优化(如图8、9所示)。Feng等[68]将操作空间作为优化指标对手术切口位置和手术机械臂的姿态进行了优化。基于多目标的术前规划优化方法相比依赖经验和虚拟系统的术前规划方法更容易找到优化目标要求下的最优解。

图7 Yu等[62]提出的基于梯度投影法的术前摆位优化

图8 闫志远等[65]提出的基于粒子群算法的术前摆位优化
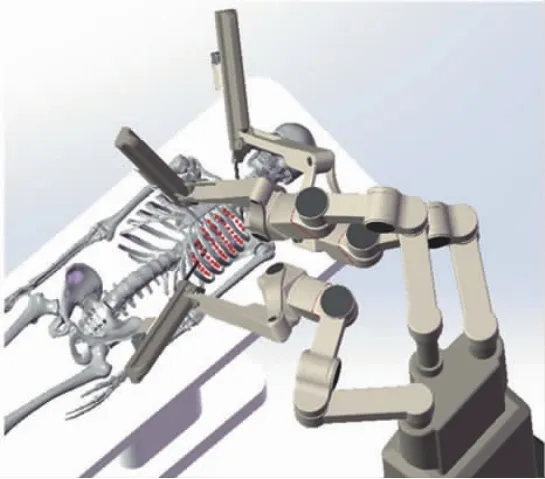
图9 Zhang等[67]提出的基于NSGA-II算法的术前摆位优化
4 结语
手术环境是一个复杂的动态系统,如何准确地将这一系统模型化,并且应用到术前规划优化中,是进一步提高术前规划效果的瓶颈问题。目前机器人辅助手术系统的术前规划存在以下问题:
(1)获取包含病灶信息的手术环境是进行术前规划的基础,但其存在诸多影响因素,如人体正常生理活动等。如何准确构建手术环境,为术前规划提供精准的数值模型是未来研究的重点。
(2)机器人辅助手术系统的术前规划为手术系统提供重要的初始参数,同时涉及到手术过程中病灶的处理、重要脏器的保护、多臂之间的协作、机械臂自身的运动等。但目前机器人辅助手术系统的术前规划大多只单一考虑手术机械臂或腹腔环境指标,无法保证对病灶区域较好的可操作性和避免对非视野区域内重要脏器的损伤等。通过将腹腔手术环境和手术机械臂指标有机地结合,有助于提高术前规划结果的合理性。
因此,精准的机器人辅助手术系统术前规划需要建立精确的组织模型,并得到手术系统多臂合理的摆位,这样才有助于手术医生获取病灶及周边器官组织的具体情况,以便于手术过程中对病灶进行精准的识别和处理,避免对正常组织造成额外的损伤,从而提高手术精度。同时满足手术过程中手术视野和操作的需求,保证手术顺利进行。另外,在进行术前规划时,多手术环境信息的融合对术前规划的合理性具有重要作用,可以间接提高手术的可操作性,也是未来发展的一个主要方向。
