雪野水库淤积测量及现状分析
2020-09-16丁若冰卞俊威
李 浩,丁若冰,卞俊威
(山东省水利科学研究院,山东 济南 250014)
雪野水库位于大汶河支流瀛汶河上游,控制流域面积444 km2,水库防洪标准为100 年一遇洪水设计,设计洪水位为232.0 m;万年一遇洪水校核,校核洪水位为238.46 m;死水位为214.5 m,死库容0.028 亿m3,兴利水位为231.3 m,兴利库容1.12 亿 m3;总库容 2.21 亿 m3。水库枢纽工程由主副坝、放水洞、溢洪道(闸)和发电站组成,是一座以防洪为主,结合灌溉、工农业供水、发电、水产养殖、旅游开发等综合利用的大(Ⅱ)型水库。
济南市雪野水库于1972 年进行过2 次淤积测量,近十几年来水库采砂量增加很快,采砂量较大,估计水下地形及各特征水位下的库容均有较大的变化。由于雪野水库重要的地理位置和巨大的综合效益,摸清其淤积形态和库容的变化情况,对于水库的防洪度汛和经济运行意义重大。
1 测量原理及过程
雪野水库是一座大型水库,库面面积大,人工实施断面测量工程量过大,因此本文采用无人遥控测量船搭载GPS-RTK(实时动态定位技术)测量设备的方式开展库区淤积自动化测量工作。
1.1 无人遥控测量船
传统的水库断面测量采用的是人工量测方式,本文设计集成了一艘无人遥控测量船开展水库断面测量。无人遥控测量船采用GPS(全球卫星定位系统)导引系统,相比于传统的人工操作、现场量测的方式,测量过程的自动化程度得到提高。
无人遥控测量船的导控原理为:水库淤积测量中的测线(断面线)已事先规划,预定测点坐标以及预定测线的方位角都已知,假若测量船偏航,则由GPS 可测得测量船实际坐标与参考坐标的偏差,经过数学运算可求得测量船与预定测线的偏离距离,以及船首方向与预定测线的偏差角度。经控制器解算出偏差纠正控制量后,将控制量经由控制机构产生模拟信号控制马达驱动遥控船的舵板进行纠偏。整个测量系统是由GPS 卫星定位系统、模糊控制判断系统、舵角偏折驱动系统、载具前进驱动系统、无线电信号传输系统、陆上监控系统6 大单元组成。
1.2 GPS-RTK 技术
常规的GPS 测量方法,如静态、快速静态、动态测量都需要事后进行解算才能获得厘米级的精度,而GPS-RTK 是能够在野外实时得到厘米级定位精度的测量方法,它采用了载波相位动态实时差分方法,是GPS 应用的重大里程碑,它的出现为工程放样、地形测图,各种控制测量带来了新曙光,极大地提高了外业作业效率。
GPS-RTK 测量系统一般由以下三部分组成:GPS 接收设备、数据传输系统、软件系统。数据传输系统由基准站的发射电台与流动站的接收电台组成,它是实现实时动态测量的关键设备。软件系统具有能够实时解算出流动站的三维坐标的功能。
GPS-RTK 基本定位原理是:在已知点上设立基准站,通过数据链将伪距和载波相位观测值及基准站坐标信息一起发给流动站;流动站不仅通过数据链接收来自基准站的数据,还要采集GPS 观测数据,在系统内形成载波相位差分观测方程,并实时处理,采用动态卡尔曼滤波技术,在运动中初始化求出整周模糊度值。这样就可以保证测定点在运动中实时定位,给出达到厘米级精度的该点位置。
GPS-RTK 测量设备结合测深仪共同作用,即可精确定位库底某一点的三维坐标,只要测量出足够多的、均匀分布点的准确三维坐标,就可以绘制出水下地形图,利用迭加原理,就可以得到在某一特征水位下的库容以及水面面积。
1.3 坐标参数转换
根据雪野水库管理局所提供的控制点坐标,通过GPS 固定站及移动站,设置好参考坐标系、投影参数、差分电文数据格式、接收间隔,求得WGS84 坐标与当地坐标系的转换四参数。
固定站架设在雪野水库管理处办公楼天台,固定站架设严格对中、整平,周围视野开阔,截止高度角超过15°,周围无信号反射物,并保证GPS观测卫星信号的质量指标,如卫星数、高度角、PDOD 值等,确保流动站在有效的信号辐射范围内,数据传输链稳定可靠。
平面坐标系采用1980 西安坐标系,中央子午线117°;高程系统采用1985 国家高程基准;投影方式采用高斯—克吕格投影,按3°分带,投影面用参考椭球面;接收间隔1 s。坐标转换四参数精度满足地形测量要求,转换参数见表1。
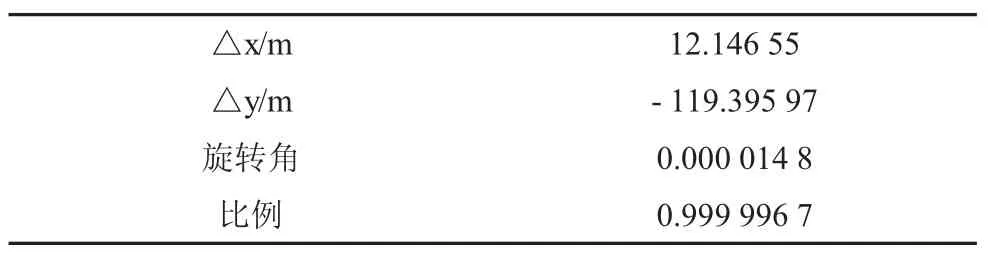
表1 雪野水库测量转换参数表
1.4 设备安装与测试
基准站、测量船上的移动站、测深仪安装,并连接到计算机上。
GPS 设置:通讯端口、波特率、GPS 类型。
测深仪设置:通讯端口、波特率、测深仪类型、发射脉宽、抑制脉宽、回波阈值、时间门限等。
整机开机,进行联机运行,确保测量设备在最佳的工作状态。
GPS 接收机无线应与测深仪换能器固定安装在同一垂线上,并尽量保持垂直。GPS 天线与测深仪换能器的平面、垂直距离为一固定值,有效地解决了由于负载、航速、航向、水流、风力等影响而造成的测量船吃水变化带来的误差。
每天测量作业前对仪器进行校核,求得校正参数;将测量船导航至固定位置,进行水温测量、深度比测,将各参数初始值确定并输入。
1.5 航迹线选择与测量
沿库区采用“区域布设法”布设好测线,按照水下地形测量规范,布设一系列间距为20 m 平行测线,沿测线方向的测点密度为5 m,库尾及近坝、近岸区域,测线、测点密度加密,以真实反映水下地形变化情况。由于所选用的仪器设备可以实时显示地形的变化,在水下地形变化剧烈的区域,加密测点。
由导航软件检控测量船的航迹和航速,保证测量线的间距,经过多次、长时间的现场实际改正校核,将船速定为3.0 m/s 左右,可保证测量精度。
2 测量成果
对雪野水库高程239.50 m 以下地形按规范进行了精确的测量,包括水下测量和岸上测量,一共有测量点28 万个。利用离散点法进行计算,得出水库水位~库容~水面面积关系表,见表2。
3 成果分析
3.1 地形分析
通过此次测量的库区地形和1972 年测量的地形相比较,发生了较大的改变,根据资料,原地形高程最低点高程为211.20 m,而现在测量的地形图最低点高程为201.12 m,库底高程降低了10.08 m。
3.2 库容分析
将水库管理局提供的资料与此次测量得到的数据进行对比,得到库容变化情况,见表3。
由表3 可知,各特征水位下的库容增加很大,这主要是由于采砂造成的库底高程下降引起的,由于采砂主要在水库的中上游,造成了各特征水位下的库容均有所增加。与现在使用的水位库容关系相比,总库容增加2 905 万m3,其中死库容增加了537 万m3,兴利库容增加了1 801 万m3,调洪库容增加了575 万m3。
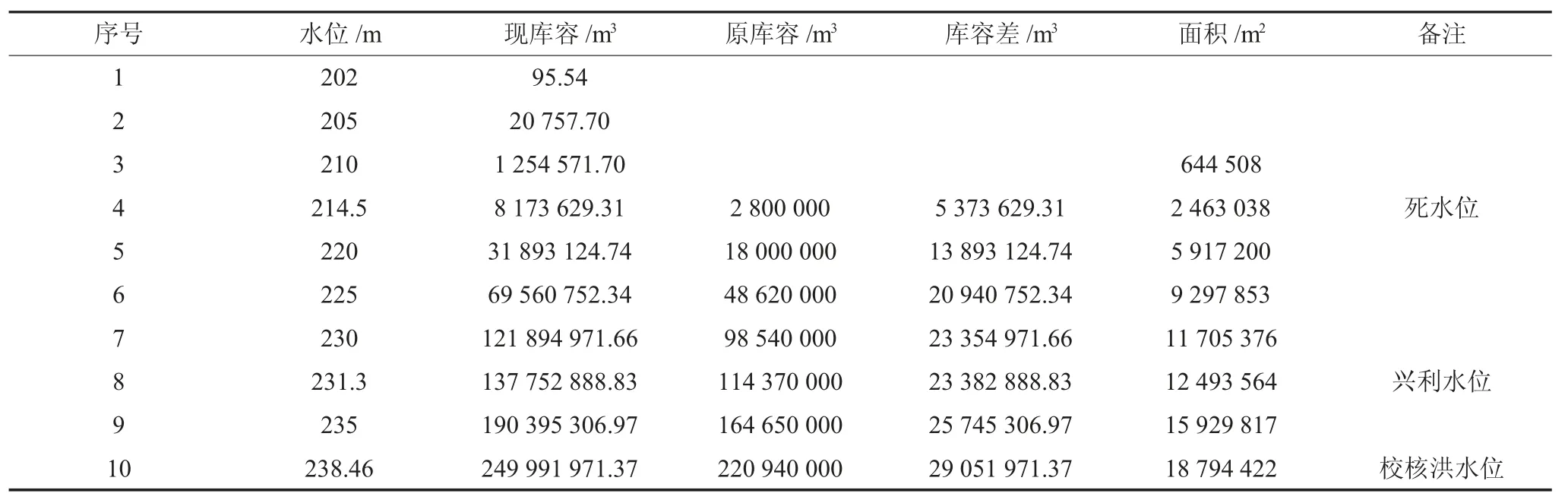
表2 雪野水库水位~库容~面积关系表
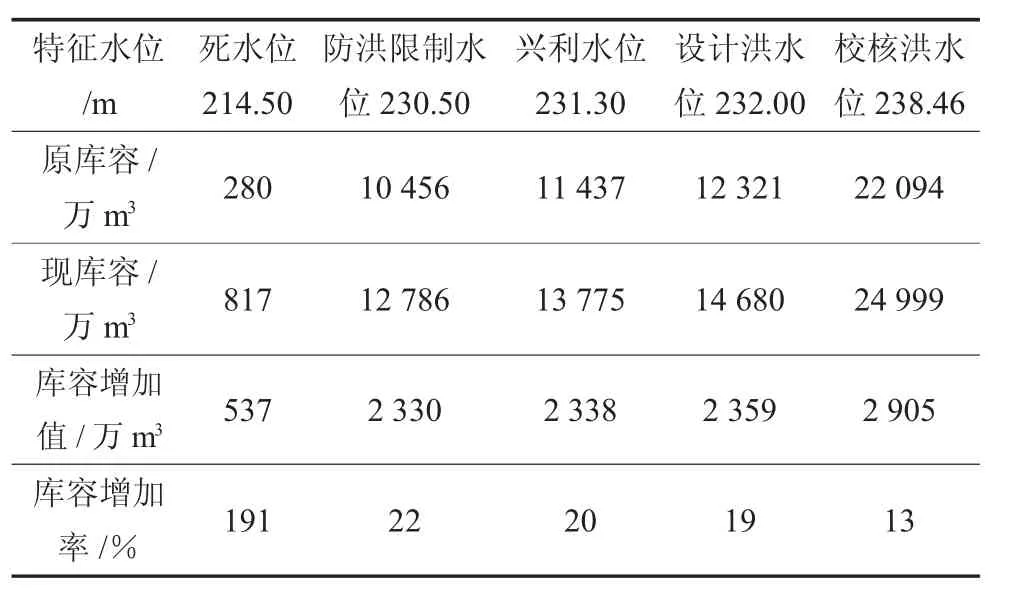
表3 各特征水位原库容、现库容比较表
