人工智能
2020-09-16
动态照明深度学习关联成像研究
中国科学院上海光学精密机械研究所量子光学重点实验室提出一种适用于傅里叶变换关联成像系统的深度学习网络模型,该方法可实现关联成像动态解码,样品只需单次曝光即可获得高质量图像。相关论文发表于Optics Express。利用傅里叶变换关联成像系统的特点,提出了一种动态解码神经网络模型(Y-Net),只要训练过程和成像过程的散斑场统计特性一致,即可高质量重建样品图像,且样品只需单次曝光。由于网络具有动态解码特性,训练散斑场的空间分布可以完全不同于实验散斑场,因此可以采用模拟数据训练网络,从而解决了常规深度学习成像方法中的数据来源问题。

动态解码网络模型(Y-Net)及实验结果(图片来源于中国科学院上海光学精密机械研究所网站)

基于深度学习的傅里叶变换关联成像原理:(a)成像光路;(b)网络数据流(图片来源于中国科学院上海光学精密机械研究所网站)
微生物单细胞人工智能鉴定研究
中国科学院微生物研究所付钰研究组利用拉曼光镊结合人工智能技术实现了微生物单细胞水平的快速准确鉴定。研究论文发表于Analytical Chemistry。研究组设计了卷积神经网络机器学习算法,建立拉曼组数据库,开展模型验证和样品预测,验证了人工智能模型对微生物单细胞检测的特异性和灵敏性,结果显示单细胞水平鉴定微生物的平均正确率达到95.64%,整个鉴定过程在5分钟内完成。鉴于人工智能分析的“黑箱性”,通过逐一遮蔽光谱的理念建立了新型的微生物拉曼光谱特征峰提取算法,实现对人工智能如何分析微生物拉曼光谱的可视化呈现,为进一步表征微生物的生化特性奠定了基础。
“磁力刀”抑制肿瘤生长研究
中国科学院合肥物质科学研究院强磁场科学中心研究员王辉、张欣与合作者利用磁溶剂热法合成出海胆状镍纳米粒子(UNNPs),实现旋转磁场诱导下的肿瘤细胞凋亡以及肿瘤生长抑制。研究论文发表于Chemical Engineering Journal。这种由磁性纳米粒子组成的“磁力刀”不是传统意义上的“刀”,它是一种磁场带动下的“机械力”,这种力量形似榨汁机在搅拌水果时产生的涡轮形力量,水果在涡轮力的作用下被搅碎,同理细胞在磁场机械力的作用下被搅碎直至死亡。UNNPs具有高饱和磁化强度和结构特异性等优点,对正常细胞以及生物体无明显毒副作用。在低频旋转磁场下,UNNPs有效抑制了小鼠体内乳腺癌的生长。
协作机器人研究
中国科学院沈阳自动化研究所协作机器人研究团队提出了一种基于有限元子结构法和正交设计的协作机器人全域多目标优化设计方法。研究论文发表于Structural and Multidisciplinary Optimization。研究人员采用全域弹性变形和一阶固有频率指标评价机器人的整机刚度和动态性能,进而提出了一种协作机器人全域多目标优化设计方法。该方法以机器人弹性变形、固有频率以及质量等指标为优化目标,解决了协作机器人结构优化中存在的位姿及非结构参数影响、多目标耦合、计算速度与精度平衡等问题,具有建模精度高、计算速度快、对各模块的复杂形状适应性好等特点,有效提高协作机器人的刚度及动态性能。
仿生微型手术机器人研究
同济大学牵头建设的上海自主智能无人系统科学中心微纳无人系统研究团队研发出仿生微型手术机器人,为超微创血栓清除提供新型医疗手段。研究论文发表于Advanced Materials。研究团队研发了一类具有集群行为、模仿趋磁菌内部磁小体有序结构的微型机器人,其材料成分、接触界面和控制方式都具有良好的生物相容性。通过实验方式和数值模拟解析了机器人内部驱动结构、磁场强度及频率对其运动能力的影响,结果显示,其最高运动速度可达161.7微米每秒。在接收到磁场群体性控制命令后,负载溶栓剂的微型机器人可聚集在血栓部位,在高频磁场控制下释放溶栓药物,进行微血管溶栓。

仿趋磁菌软体微型机器人的形态学表征(图片来源于同济大学新闻网)
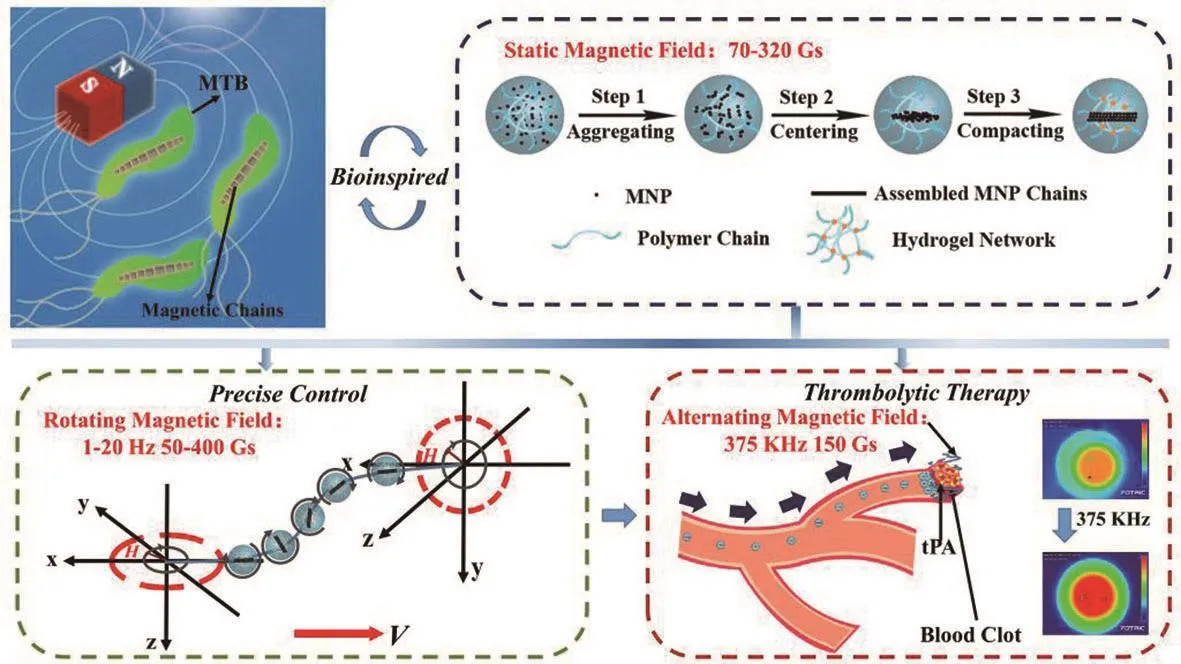
仿趋磁菌软体微型机器人的设计、制备、磁控及其微血管溶栓应用示意图(图片来源于同济大学新闻网)
近红外二区荧光成像临床转化研究
中国科学院自动化研究所分子影像院重点实验室研究员田捷等成功研发出了新型近红外二区荧光成像系统及手术导航技术,进一步利用荧光探针吲哚菁绿(ICG),开展了近红外二区荧光成像在人体肝癌成像上的应用,解决了近红外二区荧光成像临床转化的问题。研究论文发表于Nature Biomedical Engineering。新兴的光学分子影像技术为图像引导手术治疗提供了新方法和新思路。科学家们一直在探索如何将荧光成像技术用于解决临床问题,但一直面临诸多挑战。这项研究发现该技术可以术中发现其他影像模态难以发现的肝癌微小病灶和转移灶,显著提高手术切除的准确性。
痛觉信息处理的神经环路机制研究
中国科学院脑科学与智能技术卓越创新中心(神经科学研究所)、上海脑科学与类脑研究中心、神经科学国家重点实验室研究员孙衍刚研究组发现臂旁核将脊髓上行的痛觉信息直接传递到丘脑板内核而非杏仁核。研究论文发表于Neuron。该研究发现接收脊髓输入的臂旁核细胞与丘脑板内核而非杏仁核中的神经元形成直接的兴奋性突触连接。这些研究结果表明,同侧脊髓-臂旁核环路将来自脊髓的痛觉相关信息直接传递到丘脑板内核而非杏仁核。该研究揭示了脊髓内的痛觉相关信息上行传递的细胞和环路机制,为进一步研究痛觉信息处理环路的可塑性和调控机制奠定了基础。
人类利用立体嗅觉进行导航
中国科学院心理研究所周雯研究组和张弢研究组合作,采用视觉光流刺激和纯嗅觉气味(不激活三叉神经)进行实验,共216名受试者先后参与实验。研究结果发表于PNAS(美国科学院院刊)。研究论文证实,适度的鼻间气味浓度差可有效偏移个体的自身运动方向知觉,使其认为自己在向气味浓度更高的那侧行进。这一效应依赖于鼻间气味浓度的比值,而非鼻两侧气味浓度的数值差异,且发生在主观意识层面之下,受试者并不能报告哪一侧鼻腔闻到的气味更浓。研究表明,人类拥有“立体嗅觉”,它在意识层面下指引我们的导航,这为人类嗅觉虚拟现实系统的设计和发展提供了思路。
