基于小波变换瞬时频率优化的相位细分方法
2020-09-15张紫杨张文涛熊显名
张紫杨,张文涛,杜 浩,熊显名
(桂林电子科技大学电子工程与自动化学院,广西桂林 541004)
0 引言
集成电路产业是新一代信息技术产业的核心,对制造集成电路的高端制造业的要求也越来越高[1-2]。为了制造出更高精度的光刻机,对光刻机的工作台的定位和运动位移的测量精度提出更高的要求[3]。在精密位移测量领域中要求测量信号具有高精度分辨力,以实现宏观结构下微细尺度的精密测量和控制[4],光学干涉仪在位移测量具有精度高的优势。其中光栅干涉仪凭借光程短、测量稳定性比激光干涉仪更高的优势,在实际中的应用不断增多。
为了得到更高的测量精度,除了测量系统的提升之外,还可以通过对测量信号进行细分来提高信号的测量精度[5]。对信号的细分是通过在信号幅值、频率和相位中进行插值,将测量信号的一个周期分成可以识别的多个周期信号,经过细分后运动位移的测量精度成倍数提高[6]。除了对测量信号的细分外,还可以对控制信号进行细分,完成更高精度的运动控制。
现有的细分方法可以分为机械细分、光学细分、电子细分和微处理器细分等,其中机械细分和光学细分由于制作复杂、成本高和调整难度大等问题使用受到限制;电子细分的研究比较成熟,是通过电子电路对测量信号细分,不过对测量信号质量要求很高,需要进行优化和补偿。微处理器细分是将信号转换成数字信号,在微处理器中对信号细分既可以对信号幅值也可对信号相位细分,细分方式多变,随着微处理器处理数据性能的提升,对微处理器细分的研究不断深入[7]。
基于微处理器细分方法,本文优化了对信号相位细分的方法,通过对信号瞬时频率的提取,计算出细分时间,然后可以得到一段时间内细分相位的数量实现对位移的高精度测量,测量精度达到0.8 nm,并通过仿真试验验证了该方法的可行性。
1 时域内的相位细分方案设计
相位细分是对测量信号的相位进行处理,所以需要提取信号的瞬时频率,具体流程图如图1所示。

图1 对信号相位细分测量位移流程图
1.1 相位细分基本理论
对信号周期内插值进行细分处理过程中最重要的是保持插值的均匀性,要保证物体被测量或控制量被均匀分割。在用光栅干涉仪测量位移得到的干涉信号的相位与位移之间有线性关系,对位移的均匀细分在相位上也是均匀细分,其中光栅测量信号相位与位移的关系式为
(1)
式中:L为运动位移;d为光栅的栅距;φ为测量的干涉信号相位。
由式(1)可知,当光栅的栅距确定后,信号的相位与位移有确定的线性关系。
对频率变化的信号相位表达式为

(2)
式中f(t)为信号在时间段0~T之间的频率变化。
将式(2)带入式(1)中可得:
(3)
在式(3)中用时域中的时间变化表述运动位移,将对位移的测量转换到时域之中,对运动位移的细分也可转换到时域之中对相位的细分[8],其关系如图2所示。

图2 运动位移与信号相位和时间的关系
由图2可知,细分位移ΔL与细分相位Δφ具有线性对应关系,细分相位为频率在细分时间Δt内的积分,在实际测量中设定在细分时间内频率保持不变,此时细分相位的公式为
(4)
式中:f0为在细分时间内的不变频率;n为信号的细分倍数。
当信号的细分倍数确定时,便可以求得细分时间的公式为
(5)
通过计算测量过程时间段内细分时间的个数N,将其带入到式(1)中得到高精度位移公式为
(6)
将位移从空间领域转换到时间领域中对细分时间的统计,对应关系更加清晰,细分效果特别是细分倍数更加稳定。
1.2 相位细分方案设计
在测量系统对信号进行采样过程中,采样周期是定值,而细分时间随着频率变化,且细分点比采样点多,所以细分点与采样点不在同一点。细分点的频率需要经过计算,本文根据细分点频率计算方法的不同,设计了两种相位细分方案:一种是以采样点频率作为细分点频率的细分方法,优点是运算方便简单,缺点是误差过大;另一种是细分点频率在采样点间均匀分布的细分方法,先使用细分点频率计算细分时间,再根据均匀分布得到下个细分点频率,如此循环可以降低误差,但增加了运算量。2种相位细分方案的细分相位的对比如图3所示。

图3 2种相位细分方案的细分相位
在图3中细分时间Δt内的实线框包含部分为以采样点频率为细分点频率的细分方法得到的细分相位,加上的虚线包含的部分,为细分点频率在采样点内均匀分布的细分方法得到的细分相位。
2种相位细分方法各有优劣,信号的频率变化越快,以采样点频率为细分点频率的细分方法细分误差就越大,所以当信号的频率变化较快时,采用细分点频率在采样点内均匀分布的细分方法进行细分。
2 小波变换提取瞬时频率及其优化
相位细分方案的关键是细分时间的计算,通过式(5)可知,要想得到细分时间需要得到测量信号的频率。通过对短时傅里叶变换、Gabor变换、Wigner分布和小波变换等提取信号频率的方法进行比较后,选择了提取效果好、实用性较强的小波变换来提取干涉信号的频率。
小波变换是将由小波基函数伸缩变换的子小波函数序列通过平移与信号进行运算,在每个平移点处都得到一系列小波系数。小波系数表示信号与子小波函数的相似程度,小波系数最大点的子小波函数的频率可以作为信号在此平移点的瞬时频率[9]。
由于对测量信号特别是频率变化范围过大的测量信号进行连续小波变换时,运算量较大,运算时间增加,效率降低。所以需要对小波变换进行离散化,可以降低运算量,但也引入误差[10]。
针对小波变换离散化带入的误差,本文使用了拟合函数平滑优化的方法对信号进行局部分段处理,选择的拟合函数有直线函数、多项式函数和指数函数以及多拟合函数联合优化方法,优化后的效果如图4所示。

图4 信号优化前后频率变化图
3 信号仿真实验
光刻机运动台的运动的过程大致分为3部分,加速、匀速和减速,匀速运动过程中速度不变,与速度相对应的频率也保持不变,其中加速运动和减速运动的变化过程大致相同,所以这里只讨论了加速过程。
本文选取加速运动过程进行分析,由于光刻机运动的需要设定加速度a=100 m/s2。选取的光栅为1 200 line/mm,光栅常数d=833.3 nm,光栅衍射光干涉的信号频率为(2±1)MHz,采样频率为100 MHz,由多普勒效应可得到光栅干涉仪测量信号的频率与运动速度公式为
(7)
式中Δf为干涉信号的频率。
设定干涉信号为幅值为10的正弦信号时,测量信号公式为

(8)
对仿真信号的频率函数生成的数据使用本文设计的2种相位细分方法,得到一定细分倍数下的细分时间,如图5所示。
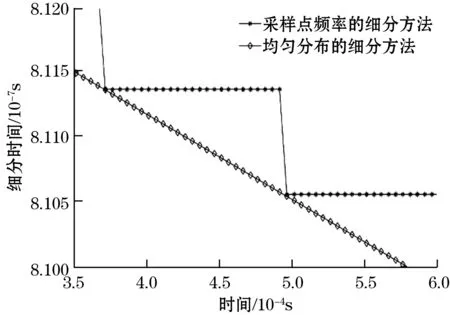
图5 2种相位细分方法得到的细分时间图
从图5可以得到以采样点频率为细分频率的细分方法在采样点间的细分时间不变,而细分点频率均匀分布的细分方法的细分时间在采样点均匀变化。而2种细分方法得到的细分相位与真实相位的相位差值如表1所示。
根据表1中数据进行计算可以得到2种细分方法得到的相位差的平均值,其中以采样点频率为细分点频率的细分方法得到的相位差的平均值为2.396×10-6rad,而细分点频率按照均匀函数分布的细分方法得到的相位差的平均值为2.496×10-8rad。通过对数据的分析确定细分点频率均匀分布的细分方法在本文测试中细分效果更好。

表1 2种细分方法得到的相位差
通过将仿真信号进行采样,数据经过小波变换后得到采样点的频率,再进行细分处理得到的相位差的平均值为1.911×10-4rad,与理论方案相比误差较大,经过拟合函数优化后再细分得到的相位差如表2所示。

表2 不同函数优化后相位差值表
由表2可知,多拟合函数联合优化的相位差均值和方差最小,优化的效果最好,选择使用此优化方法,降低至优化前的14.8%。在细分倍数为1 024倍时,单个细分位移及位移测量精度为0.8 nm,相位误差降低到2.831×10-5rad,此时的位移误差为1.870×10-3nm。本文设计的相位细分方案达到研究的预期目标,还能根据不同的需求变换细分倍数,并且具有很好的稳定性。
4 结束语
为了提高位移测量精度设计的2种相位细分方法,能根据测量需求不断调整细分倍数,改变测量精度,分析和仿真试验证明,在经过优化后,系统的测量精度达到0.8 nm,位移误差为1.870×10-3nm,能满足对位移的高精度测量要求。由于测量误差在测量过程中会叠加,影响测量的量程,所以需要对由于细分方案和瞬时频率提取带入的误差进一步的优化处理,在达到高测量精度的基础上实现大量程测量。
