无人驾驶车辆关键系统构成及技术路线浅析
2020-09-14黎耀旭韦跃亮
黎耀旭 韦跃亮
摘 要:汽车已成为一种日常的交通工具,而在上个世纪七八十年代,改革开放初期的中国百废待兴,作为新兴事物之一的汽车还是高高在上的奢侈品,大部分平民老百姓仍然高不可攀。到了本世纪初期,随着科技进步以及生产能力的逐步提高,汽车已是“旧时王谢堂前燕,飞入寻常百姓家”,逐渐成为家家户户买得起的代步工具。而汽车之所以能为人类带来便利的出行,得益于突飞猛进的科技进步和人类文明的发展。这不,从2005年起源的无人驾驶汽车,又开始带来新的汽车技术变革,为人类提供更安全便利的出行享受。那如此神奇的驾驶技术是如何做到无人干预,还能实现安全便捷的出行方式的呢?下面我们就一一揭开无人驾驶技术的神秘面纱。
关键词:无人驾驶车辆 路面感知系统 车联网系统
最早的无人驾驶车辆的发展,可以追溯到2005年的美国,在第一届无人驾驶车辆比赛中,虽然没有参赛选手能够跑完全程。但到了第二年,2005年的无人驾驶越野比赛,有多支参赛队伍成功跑完比赛全程,展示了无人驾驶技术在无人干预的前提下实现自主控制的广大技术前景。这次比赛斯坦福大学和卡耐基梅隆大学获得了第一、二名,高校又走在了技术革新的最前沿。
而要做到真正意义上的无人驾驶,传统车辆还需要增加下面这些关键系统。
1 无人驾驶车辆的路面感知系统
无人驾驶车辆的路面感知系统包括毫米波雷达、超声波雷达、激光测距仪、光学摄像头等,不同的传感器系统对应实现不同的感知功能,这些传感器的功能就像人的眼睛和耳朵,感知周边物体的方位和距离。
毫米波雷达还分为远距离毫米波雷达(LRR)和近距离毫米波雷达(SRR),由于毫米波在大气中衰减较小,可以探测感知到的距离更远,远距离毫米波雷达可以实现超过200米的感知与探测。与超声波雷达比较,毫米波雷达的体积更小,质量更轻,
分辨率更高。与远红外传感器、激光测距雷達、光学摄像头等传感器相比,毫米波雷达在穿透雾、烟、灰尘方面的能力强,具有全天候的特点。毫米波雷达的抵抗干扰水平也高于另外几种探测传感器。当前市场上主流的毫米波雷达,根据其频率(HZ)大小的的不同,通常分为两种:第一种是24GHz毫米波雷达,另一种是77GHz毫米波雷达。低赫兹的24GHz毫米波雷达检测范围在中短距离上,主要用于近距离的盲点探测。而较高赫兹的77GHz毫米波雷达主要用于探测远距离目标,一般应用于ACC自适应巡航等。
2 无人驾驶车辆的执行结构
无人驾驶车辆的执行机构包括动力控制系统、变速箱控制系统、制动力控制系统、方向盘控制系统等,这些控制系统模拟人的手和脚,控制车辆大的加减速和转向、停车等操作。
无人驾驶车辆的执行系统通过车载CAN总线进行内部通信,通过接收前面传感器传来的信号,根据行车需要做出相应的加减速、停车、转向等动作。
3 无人驾驶车辆的决策单元
无人驾驶车辆的决策单元主要包括路径运行规划和精确导航两部分,就像人的大脑,决定车辆的行驶方向和行车路线。说到导航,就让人联想到导航地图,无人驾驶也使用到地图来导航,而这个地图跟我们平时用的导航地图还有些差异。无人驾驶车辆使用的是高精度电子地图,高精度电子地图在导航精度和地图数据量上与我们常用的普通地图差异很大,因此被称作“高精度电子地图”。 高精度电子地图的精确度可以达到厘米级别,地图中包含的三维图像里有车道线、周围物体的坐标位置等相关信息。自动驾驶的高精度电子地图还会收集道路激光雷达的反射强度,它变化慢而且变化量很小。通过光学摄像头扫描获取的信息跟已知的高精度地图数据进行比对,就可以确定当前车辆的位置。再根据惯性导航原理进行迭代运算,就可以根据已知的当前位置以及目的地位置的路线关系,从而推算出最佳的行车路径。无人驾驶车辆通过路面感知系统、执行系统、决策系统构成了一个完整的独立运行机器,在没有人参与的情况下,实现车辆所有者点到点的安全便捷出行。
4 无人驾驶车辆与车联网系统
无人驾驶车辆的决策单元不仅需要独立的进行车辆控制,更需要“城市智慧交通系统”的环境。除了通过高精度电子地图进行路径规划,还有一个路径规划技术是V2X(vehicle to everything),意思是车辆与外界的信息交换,它是在V2I(Vehicle to Load),即交通信号灯识别系统的基础上发展起来的。V2X技术将车辆和周围环境整合成一个“物联网系统”,包括车与车之间的通信、车与交通设施之间的通信等,甚至是车对行人的数据处理等一系列的信息交互过程。当无人驾驶车辆能直接“获取”交通信号灯信息,而不是通过“探测”信号灯的信息,就容易实现不闯红灯。无人驾驶车辆“获取”的交通信号灯信息的意思是,在离交通信号灯还有200米远,传感器还“探测不到”交通信号灯时,交通信号灯就主动通过信息传输系统向周边无驾驶车辆“告知”信号灯的当前信号状态及发生变化大的时间,无人驾驶车辆不再需要通过“探测”交通信号灯的状态(“探测”信号灯状态有时比较难以实现,比如在大雨天、暴风雪天,被风刮起的垃圾袋,甚至是大巴车的遮挡,都容易导致车辆的传感器“探测不到”交通信号灯)。此外,如果无人驾驶车辆可以提前获取周围车辆的行车路径,就可以尽量避免碰撞事故的发生,提高出行安全性。
4.1 无人驾驶车辆的技术路线及现状
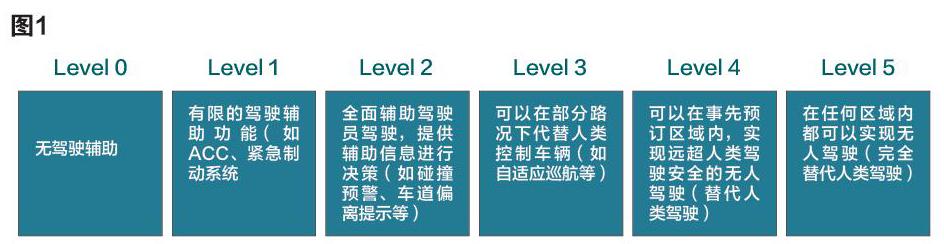
汽车工程师协会(SAE)分类,无人驾驶分 Level 0 到 Level 5六个发展阶段。
每个发展阶段的定义如下图1:
按照无人驾驶等级划分,L2级到L3级属于“辅助驾驶”的范围。因为属于这个无人驾驶级别下的状态,车辆驾驶员仍然要承担车辆驾驶的所有责任,自动驾驶系统是不承担所有发生事故的任何法律后果。
当前L2级的无人驾驶车辆单车成本已经下降到千元以内,出厂选装的沃尔沃智能驾驶辅助系统售价也仅在数千元上下,当前众多国产车如吉利博睿、广汽传祺GA8、长安睿驰CC等国产品牌车型已经可以搭载L2级别的自主研发无人驾驶系统。
