隧道施工监测三维激光全断面扫描方法研究
2020-09-14刘春梁晓东吴勇生
刘春, 梁晓东, 吴勇生
(1.广东省公路建设有限公司, 广东 广州 510623; 2.湖南联智科技股份有限公司)
1 引言
三维激光扫描技术能快速获取空间物体的表面信息,数据获取速率快,在工程领域得到广泛应用。三维激光扫描技术在隧道中的应用研究是近几年的热点。李珵等提出了运营地铁隧道断面连续提取与变形分析方法;韩素文提出了隧道三维激光扫描和数据可视化处理流程,证明该技术可以准确地获取隧道变形数据;侯海民结合胶州湾海底隧道安全监测实例,认为该技术将成为未来隧道工程安全监测的主要方法。
但是,这些研究没有对三维激光扫描隧道监测技术进行全面讨论,也没有考虑其精度和可靠性问题,制约了该技术的进一步推广应用。该文将三维激光扫描技术应用于高速公路隧道施工中的监控量测,获得连续的断面数据,并可进行拱顶沉降和周边收敛监测、断面检测、二衬厚度检测、净空检测等,与传统方法进行对比后表明:三维激光全断面扫描方法具有一定的精度和可靠性,值得推广应用。
2 隧道点云数据处理基础
点云数据包含了被测物体表面的三维坐标、激光反射强度和颜色信息。点云数据具有高精度、可量测性、不规则性、高密度、表面性等特点。三维激光扫描仪获得的点云数据,一般需要专用软件对其进行处理。
2.1 点云数据配准
在三维扫描仪进行扫描的过程中,由于扫描对象可能存在自遮挡问题以及三维扫描仪自身视场范围的限制,需要从不同角度对物体或环境进行多次扫描,才能获得被测物体或环境的全貌。将多次扫描的点云数据统一到相同坐标系的过程叫做点云拼接,也叫点云配准。点云配准的实质是空间坐标系转换,其数学模型为:
(1)
式中:(X0,Y0,Z0)T为平移向量;R为旋转矩阵;(X,Y,Z)T为旧坐标系坐标;(x,y,z)T为新坐标系坐标。
一般来说,点云配准技术可以分为3大类:基于点云自身特性的配准、基于人工标志的配准和基于扫描仪定向的点云配准。基于人工标志的点云配准能够获得较高精度,是目前工程项目或大场景扫描作业中常用的点云配准方法,该文采用这种方法。
2.2 隧道中轴线拟合
隧道的中轴线反映了隧道整体的位置、走向和姿态,隧道的中轴线也是隧道横断面提取的基础。隧道中轴线的拟合方法为将隧道点云数据分别投影至XOY面和YOZ面(假设Y轴与隧道轴线方向一致),经过一定的数据处理后,采用二次多项式进行曲线拟合,则隧道的中轴线可以表示为:
(2)
如果已知隧道中轴线的设计信息,则可以将点云数据转换到施工控制坐标系,再根据设计中轴线信息提取断面,然后拟合出断面的中心点,再由一系列的断面中心点拟合出中轴线。该文讨论的是施工中的隧道,所以采用设计的中轴线信息。
2.3 隧道断面提取
由断面的定义可知,隧道中轴线上某点L处的断面与该点处的切线垂直,也即该点处的切线向量就是该断面的法向量。设L点在中轴线上的坐标为(x0,y0,z0),L点处的切线向量为n=(A,B,C),则该点处的断面方程为:
A(x-x0)+B(y-y0)+C(z-z0)+D=0
(3)
若隧道线路设计参数已知,则L点处的切线向量n=[1,k,i/cos(tan-1k)],k为隧道中轴线在XOY平面中的切线斜率;i为坡度。
不论扫描仪的分辨率多高,测量的点与点之间总会有一定的间隔,所以在实际提取断面时,该断面并不是严格的平面,而是有一定厚度d的平面,在实践应用中,一般提取1~2 cm厚度的数据作为断面数据。因此,设扫描获得的点云数据为P,pi=(xi,yi,zi),i=1,2,3,…,n,则L处的断面数据集PL可定义为:
(4)
3 隧道监测实例
3.1 仪器设备和监测对象
实例采用的三维激光扫描仪数据获取速率超过100万点/s,50 m处精度最高可达0.5 mm,测程为0.3~187.3 m,基本满足施工隧道监控量测的各种要求。
监测对象为广东托盘顶隧道出口段。托盘顶隧道为长隧道,左、右线分离布设,左线长度为1 138 m,右线长度为1 084 m,左、右线隧道纵坡均为人字坡,进出口洞门均采用端墙式洞门。地面最大高程约为268 m,隧道最大埋深约为110 m。隧道区属于燕山期侵入花岗岩区,隧道出口段附近见有大量的微风化花岗岩孤石;隧道位于低缓丘陵区,地表水不发育。
3.2 数据采集过程
为便于后续数据处理和分析,需布设控制点将点云数据转换到施工坐标系中。
控制点的数量一般为3~4个,并使其在测区内均匀分布。在施工隧道中,由于现场条件限制控制点只能布设在一边。控制点布设完成后,用高精度全站仪测出控制点在施工坐标系中的坐标,便于后续将点云数据转换到施工坐标系。
按照上述要求,对托盘顶隧道出口段进行了一个多月的连续扫描,获得的数据比较完整,质量较高。
3.3 点云数据处理
外业扫描完成后,将扫描仪中的数据复制到计算机上并导入点云数据处理软件。在数据处理软件Z+FLaserControl中,对扫描数据进行滤波去噪、靶标提取、点云配准、坐标转换和数据导出等处理,最终得到隧道表面的三维坐标文件。
根据前文算法,断面厚度d设置为1 cm,从隧道表面的三维坐标文件中提取出所需断面数据,理论上可以提取所有桩号处的断面,单个断面约有1 200点。为便于显示,对原始数据进行了平移处理,平移向量为:(-2 508 000 m,-4 849 000 m)。定义隧道所在位置往北方向为x方向,往东方面为y方向,隧道高程方向为z方向,建立三维坐标系。
3.4 点云数据应用
从点云数据中提取的每一个断面都可以进行拱顶沉降与周边位移监测、轴线偏位监测、断面检测、净空检测和二衬厚度检测等。图1为K6+770断面的拱顶沉降与周边位移布点分布图。

图1 拱顶沉降与周边位移布点图(K6+770断面)
3.5 点云监测精度分析
为验证三维激光扫描测量结果,同时用传统观测方法对K6+770断面进行监测。传统方法监测布点时,使用高精度全站仪放样出收敛和沉降点位置,使其在同一断面上,且收敛测点在同一高度。根据从点云数据中提取的拱顶沉降和周边位移监测数据及传统手段获取的数据绘制成时间变化曲线图,如图2、3所示。
从图2、3可以看出:该断面38 d内累计沉降14.4mm,并且于6月11日趋于稳定;两种不同方法观测的拱顶沉降变化趋势基本相同,并且变化值的差值全部都在1 mm之内;同时,该断面34 d内累计收敛8.19 mm,并且于6月10日趋于稳定;三维激光扫描的观测结果与传统方法的观测结果非常吻合,累计收敛值偏差小于1.6 mm。
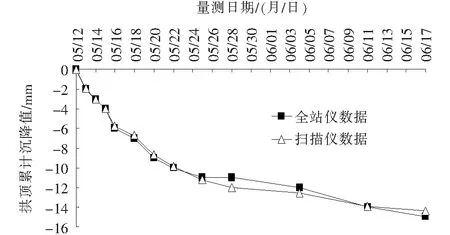
图2 拱顶沉降变化曲线图(K6+770断面)
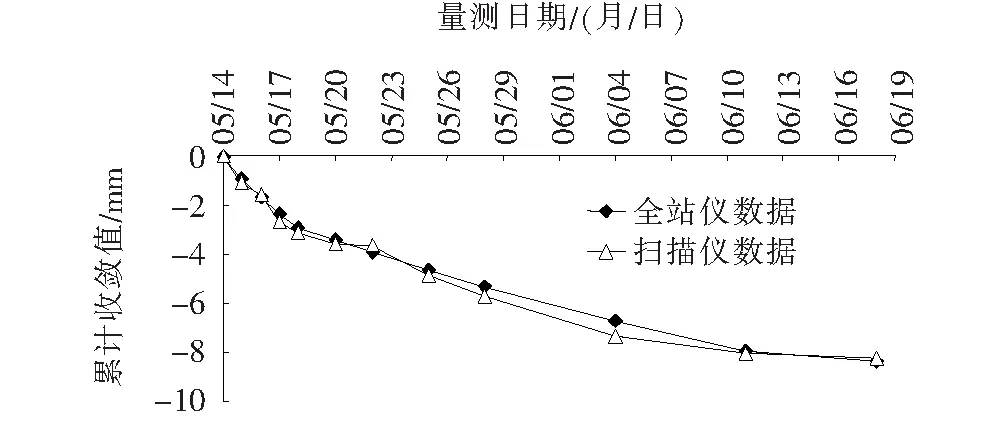
图3 周边位移变化曲线图(K6+770断面E-F测线)
3.6 三维激光扫描方法的优势
传统的收敛计、水准仪、全站仪和激光断面仪等变形监测手段,受人为操作影响很大,且获取的点过于稀疏,不能全面反映隧道的整体变形情况,而三维激光扫描全断面技术对隧道进行连续全断面监测,可以避免传统方法两断面间无监测数据的弊端,而且在监测时间、所需人员配备方面相比传统测量方法都具有一定优势。传统测量方法与三维激光扫描全断面方法对比如表1所示。
4 结论
(1) 三维激光扫描方法仅需1~2人就可以实施,仅需5 min就可以完成50 m范围内的所有断面监测和检测项目,极大地提高了测量效率。

表1 三维激光全断面扫描技术与传统方法对比
(2) 一次扫描可以对多个参数进行监测,提高了数据利用效率。
(3) 三维激光扫描隧道监测方法的精度和可靠性与传统方法相当。
(4) 三维激光扫描方法能够有效规避传统方法数据量不足、受人为影响大的局限性,可以及时发现隧道施工过程中的轴线偏位和衬砌侵限等问题,可避免因此返工而造成的巨大经济损失,值得推广应用。
