公共服务机器人控制系统设计研究
2020-09-10褚明杰
摘 要:本文探讨了公共服务机器人的功能需求,提出了以RK3399为控制核心的公共服务机器人控制系统方案,采用模块化设计思路,设计并实现了一种符合实际应用需求且成本相对较低的公共服务机器人控制系统。
关键词:公共服务机器人;控制系统;RK3399
中图分类号:TP242 文献标识码:A 文章编号:2096-6903(2020)10-0000-00
0引言
近年来,随着人工智能技术的飞速发展,做为人工智能技术主要载体的公共服务机器人也开始在酒店物品运送、商场促销导购、政务办理等各个领域得到较大规模的应用。面部识别、语音识别及激光SLAM导航已成为公共服务机器人的标配功能。这些功能在给顾客带来较好的人机交互体验的同时,也提高了控制系统的复杂度,对控制系统的性能、成本提出了更高要求。
基于此,本文设计了一种面向公共服务机器人的控制系统,采用模块化设计思路,降低控制系统的复杂度,充分考虑成本因素,可基本滿足不同应用领域对公共服务机器人控制系统的需求。
1控制系统设计
1.1需求分析
目前用于公共服务场景的机器人主要有以下三种功能:(1)人机交互功能,机器人通过视觉、语音技术与人进行交互;(2)自主导航功能,机器人通过激光SLAM技术自主导航运送物品以及引领客人到达指定地方;(3)云端功能,由于机器人本身计算能力和存储能力有限,为使人机交互有较好的体验,需要机器人连接外网获取部署在云端服务器上的语音、视觉知识库及其它丰富资源。
1.2系统设计
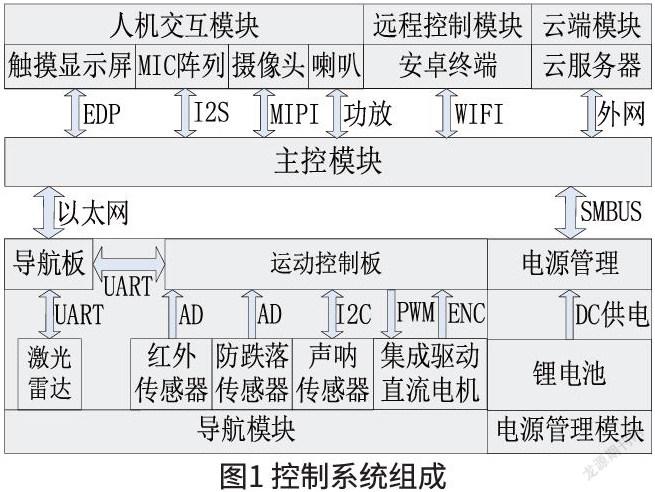
整个控制系统组成如图1所示,将控制系统主要分为人机交互模块、主控模块、导航模块、电源管理模块、云端模块以及远程控制模块。
人机交互模块是机器人对外感知与实现的载体,其包括触摸显示屏、摄像头、MIC阵列及扬声器等,还可扩展热敏打印机、条码扫描、身份证识别仪等设备用于办理具体的个人业务。考虑公共服务机器人需要较大屏幕进行业务办理等操作,本设计中屏幕选用主流的15.6寸EDP接口高清屏。摄像头主要用于人脸识别、人体跟踪、拍照、视频通话等,考虑到成本以及功能需求选用13Mpixel的MIPI-CSI接口摄像头。MIC阵列主要用于音频采集,并为语音识别算法提供初始音频。为实现机器人360°声源定位和语音降噪,采用6MIC阵列设计。由于模拟MIC采集的音频信号为小信号,在传输过程中易受干扰,影响语音识别效果,所以选用I2S接口数字硅麦。为保证在嘈杂环境下机器人外放声音能够较清晰的被机器人周围人员听到,采用2x10W立体声扬声器。
主控模块是整个控制系统的核心以及人工智能技术的硬件载体,相当于人的大脑。考虑需要运行语音识别、人脸识别等人工智能算法,因此对计算能力有较高要求,所以主控模块的处理器选用瑞芯微的RK3399处理器。RK3399处理器采用目前主流的双Cortex-A72+四Cortex-A53的大小核CPU架构,具有ARM Mali-T860四核GPU,以及eDP、MIPI、I2S、UART等丰富接口。采用4GB DDR3+32GB EMMC,运行Android 7.1,可以较流畅的运行语音识别和人脸识别算法。通过RK3399自带的USB及I2C接口可扩展EC20 LTE模块,该模块是Cat 4无线通讯模块,支持最大下行速率150Mbps和最大上行速率50Mbps。通过Mini PCIe连接器安装在主控模块板卡上。并采用自带MDIO接口扩展AP6356 WIFI模块,该模块支持双通道并行通讯,并支持蓝牙4.1及WIFI 2.4Ghz和5Ghz频段,可实现机器人在WIFI和LTE间自由切换上外网方式连接云端模块。为驱动人机交互模块的2x10W扬声器,需通过I2S数字音频接口扩展功能设置芯片AD82584的驱动扬声器,并扩展6MIC阵列和CODEC芯片TLV320ADC3101,将扬声器输出音频回采,用做语音识别的回声消除。通过EDP和MIPI接口扩展显示屏及摄像头。
导航模块主要由导航板和运动控制板组成。用于实现机器人自主导航定位、避障、自动回充等功能。因此需外接激光雷达、红外避障、防跌落和声呐等多种传感器。激光雷达具有测量功能,可将距离和角度信息输出给导航板,用于建立轮廓地图及实时导航定位。声呐传感器安装在机器人前方及侧前方,可探测机器人前方2m以内障碍物,用于补偿激光雷达扫描盲区。红外避碰传感器的探测距离较近,一般在10cm以内,主要安装与机器人前半部,安装高度与激光雷达和声呐错开,主要用于补偿激光雷达和声呐传感器探测盲区。防跌落传感器安装于机器人底盘前半部下方,一旦机器人运行前方出现台阶,将触发对应位置的防跌落功能,使机器人停止前进,避免机器人跌落台阶。导航板将获取到的多传感器信息进行数据融合解算,生成机器人自主规划路径,并控制电机完成机器人自主运动导航。考虑公共服务机器人应用场景对机器人运行速度及定位精度要求不高,本设计中选用思岚三角法激光雷达搭配导航板。该激光雷达可测量范围可达18m,基本可满足服务机器人导航应用,且价格便宜。导航板通过板对板连接器安装于运动控制板上,与运动控制板单片机通过UART通讯。运动控制板以STM32单片机为控制核心,通过I2C接口采集声呐数据、ADC接口采集红外测距传感器和防跌落传感器数据,并通过UART将所有传感器数据发送给导航板。运控控制板除与导航板通讯外,还提供5V稳压电源给导航板和激光雷达。导航板通过自带另一路UART接口读取激光雷达数据,并融合多传感器数据包括读取电机编码器数据做控制闭环完成机器人位姿解算。将解算后下一位姿运动指令通过UART发送给运动控制板,控制电机转动完成机器人导航控制及避障。由于有刷电机寿命较低,所以本设计中电机选取集成驱动型无刷电机,STM32只需通过PWM调速及一路IO信号控制电机正反转即可[1]。
电源管理模块包含电池、BMS、充电及电源转换电路。电池由18650三元锂电芯,4串8并组成,电量可达20Ah/14.4V。本设计中机器人自重35KG,此电量可以续航9~12h。BMS采用BQ40Z50+BQ2947方案。BQ40Z50可监测电池电量、电压、电流、温度等参数,并通过SMBUS将参数信息发送给主控模块。BQ2947是用于锂电池组的过压监视保护器,可独立监控每节电池是否具有过压状态。充电电路采用BQ24610充电控制器+MOS管方案,BQ24610支持恒流恒压充电,充电电流最高可达10A,即最高可0.5C充电。采用LM2596将电池电压转换为稳压12V输出给系统各模块。
云端模块部署于云端服务器上,用于监控机器人实时状态,采集已接入机器人的实时数据,进行数据分析等功能。还用于部署机器人云端知识库,包括语音库和人脸库等,针对如金融、法律等不同行业配置专属知识库,提高机器人智能化程度。
远程控制模块,使用安卓设备如手机、平板并安装远程控制客户端软件,实现对机器人的远程遥控以及调取机器人本体MIC阵列、摄像头,与机器人本地端进行远程视频等。
2结论
本文设计并实现了一种符合实际应用需求、成本相对较低的公共服务机器人控制系统。实践证明其可以满足公共服务机器人的应用需求,具有较好的推广价值。
参考文献
[1]蔡俊杰,吴益飞,徐航宇,等.餐厅服务机器人控制系统设计与实现[J].计算机测量与控制,2017(2):77-78.
收稿日期:2020-09-10
作者简介:褚明杰(1980—),男,辽宁沈阳人,本科,高级工程师,研究方向:服务机器人相关产品研发。
