玻璃纤维网格布缺陷自动检测系统的研究
2020-09-10汪珺年福东肖仁杰
汪珺 年福东 肖仁杰




摘要:基于机器视觉设计了一种玻璃纤维网格布缺陷自动检测系统,可实现玻璃纤维网格布缺陷的识别以及分拣等功能。整个系统采用STM32作为运动控制处理器以实现机械手的运动控制,利用NI myRIO平台采集玻璃纤维网格布信息,设计玻璃纤维网格布缺陷识别算法,完成图像的处理与分析从而驱动机械手完成网格布的分拣。实验结果表明该系统可以实现玻璃纤维网格布缺陷的识别以及分拣。
关键词:网格布;玻璃纤维;机器视觉
0 引言
20世纪70年代英国皮尔金顿公司发明玻璃纤维[1]解决了普通玻纤与水泥发生碱性反应带来强度下降、开裂渗漏等问题,可用于多种场合,比如高强度的玻璃纤维嵌入水泥基体后可有效改善并提高水泥基体的抗弯曲强度和抗冲击强度等力学性能[2],在水泥基体中加入4~5%的玻璃纤维即可大大改善其力学性能[3];再比如作为脆性材料的混凝土虽然抗压强度高但存在抗拉强度低、抗裂性差和脆性大等缺点,在较低的拉伸变形时容易发生开裂[4],而纤维混凝土被认为是解决混凝土上述缺点最为有效的方法之一[5-6]。而由玻璃纤维织成的网格布为基布表面涂覆高分子耐碱涂层制成的玻璃纤维网格布正在大量被采用将其埋入抹面层用于提高防护层的机械强度和抗裂性。玻璃纤维网格布缺陷检测系统的研制涉及传感器与测试系统、机械系统和控制系统等各学科的前沿技术,具有十分重要的社会意义和经济价值。本文基于虚拟仪器技术设计了一种基于机器视觉的玻璃纤维网格布缺陷自动检测系统,可实现玻璃纤维网格布的缺陷识别以及分拣等功能。系统采用摄像头采集指定区域的玻璃纤维网格布图像,设计识别算法通过NI myRIO完成图像处理和分析,STM32作为运动控制系统的处理器控制机械手完成玻璃纤维网格布的分拣。
1 工作原理
系统由myRIO数据采集模块、STM32控制板模块、JQC-3FF-S-Z继电器模块、LD-3015MG舵机模块等功能模块组成。小型摄像头将所得的图像信号实时传输到myRIO数据采集模块中,再通过myRIO对所采集的图像对玻璃纤维网格布进行缺陷检测并将识别后的结果通过WIFI的方式传输到下位机中,下位机控制机械手运动,与此同时继电器接通,气泵开始工作来吸取放在某一位置上的检测对象,由此便完成了一个周期的工作。整个系统的工作原理如图1所示。
2 系统结构设计
玻璃纤维网格布检测系统的主要机械结构为执行分拣网格布的机械手,通过三维软件进行3D建模和虚拟装配,机械手3D建模模型与实物图如图2所示。机械手上连接有吸盘,机械手底座上连接的收集盒、以及控制吸盘运作的气泵。工作时,下位机控制五个舵机实现机械手的一系列运动,同时驱动气泵工作从而吸起网格布放到相应的收集盒里。
3 玻璃纤维网格布缺陷检测设计
3.1 图像采集模块
该模块主要功能是捕捉图像,获取当前帧的最新图像输出,清除图像覆蓋的处理,从而输出满足视觉识别的图像。
3.2 图像灰度化处理模块
为了降低图像识别带来的计算量,我们对采集的图像先进行图像灰度化处理,让图像的像素点的R=G=B从而得到灰色的图像,这样可以将原来的计算量大大的缩小到原来的六万五千零二十五分之一,同时灰度处理后,还不会影响原来图像的特征。所以在图像识别的处理中,我们可以先进行图像灰度化处理,其程序框图如图3所示。
3.3 图像增强处理模块
对于拍摄的照片之间的对比度较低的情况,采用相应模块进行图像的增强,图像增强主要通过拉伸图像有用部分的灰度,使图像的光泽部分更清楚,该部分程序框图如图4所示。
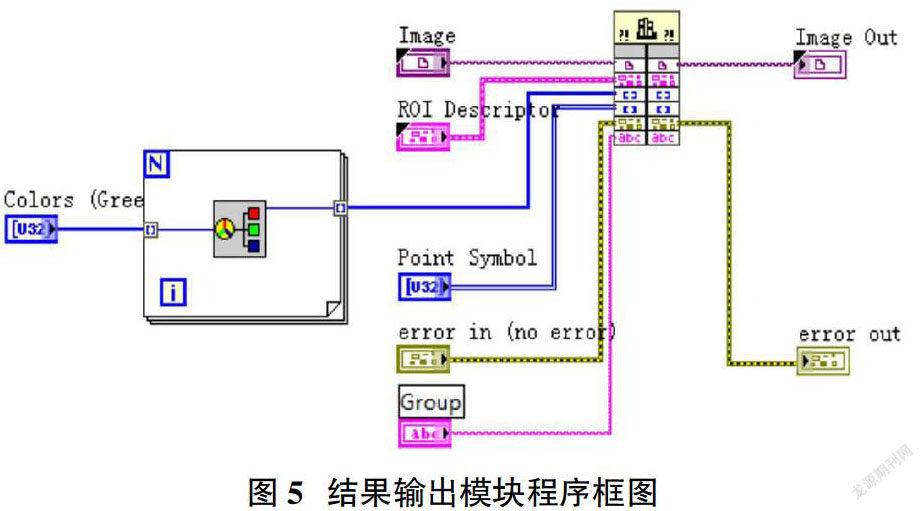
3.4 结果输出模块
原始图像经过图像预处理和模板处理之后就要进行结果输出,得出所检测表面是否有缺陷的结果,然后向机械手发送信号。在本系统中,有缺陷的部位会有一个稍大于缺陷的红色方框,该部分程序框图如图5所示。
4 机械手控制系统设计
玻璃纤维网格布缺陷自动检测的机械手的控制采用STM32控制器,控制舵机及气泵从而利用机械手实现玻璃纤维网格布的分拣。使用者可以通过人机交互界面设定舵机转动的度数,该度数就是机械手上各舵机所转动的度数。通过实验确定机械手的最优的运动方式,所得到的数据可以更加稳定地控制舵机从而让机械手的运动方式最优。
5 实验结果
图6中所显示为对目标区域图像进行分析的结果,从二值化的图像中,我们可以清楚的看清网格的纹理,红色的区域的网格布是符合标准的网格布,黑色区域网格为不标准的网格布区域,由此可以判别网格布是否有缺陷,根据判别结果进一步控制机械手进行网格布的分拣。经多次运行测试,系统识别缺陷的正确率可以达到95%以上。
6 结束语
设计了基于玻璃纤维网格布缺陷系统。整个系统包括机械手、机械手上连接的吸盘、机械手底座上连接的收集盒、以及控制吸盘运作的气泵,系统还包括图像采集模块、图像分析模块、通信模块、控制模块。通过识别玻璃纤维网格布缺陷来控制机械手运动,并利用气泵提供动力使机械手上的吸盘吸附需要分拣的网格布。整个装置结构简单,成本低,自动化工作,操作简单,耗电少。
参考文献:
[1]杨海岸.GRC构件在外装饰工程中的施工和应用[J].山西建筑,2008(33):157-159.
[2]沈荣熹,崔琪,李清海.新型纤维增强水泥基复合材料[M].北京:中国建材工业出版社,2004.
[3]鞠丽艳,张雄.玻璃纤维在建筑材料领域中的应用[J].玻璃纤维,2003(5):15-20.
[4]沈荣熹,王漳水,崔玉忠.纤维增强水泥与纤维增强混凝土[M].北京:化学工业出版社,2006.
[5]程国庆,许蕴贤,卢祖文.钢纤维混凝士本构理论的研究.工程应用及发展[J].中国铁路,1998(6):15.
[6]陈润峰,张国防,顾国防.我国合成纤维混凝土研究与应用现状[J].建筑材料学报,2001(2):167-173.