现代轨道交通车辆电气牵引技术探讨
2020-09-10杨华胡彪
杨华 胡彪
摘要:我国城市化建设不断加快的同时,对于城市交通带来了巨大的压力。城市化建设不断发展的过程带给道路交通的压力也不断增大产物,轨道交通为城市交通提供便利。电气牵引技术是现代轨道交通非常关键技术之一,主要作用是确保轨道交通车辆有足够的电力驱动力,提高轨道交流运行的平稳性。现阶段轨道交通的快速发展要求电气牵引技术也需要不断完善。以下是文章对现代轨道交通车辆电气牵引技术的应用情况经分析,目的是强化该技术的应用效果,进一步推动我国轨道交通的迅速发展。
关键词:现代轨道交通;车辆电气牵引技术;电力驱动;城市交通压力;牵引系统
一、前言
现代轨道交通不可缺少的技术之一就是电气牵引技术,电气牵引技术主要为现代轨道交通车辆要想正常运行就需要有足够的驱动力,而电气牵引技术的主要作用就是为其提供电气驱动[1]。该技术对于现代轨道交通来说是非常重要的。电气牵引技术具有较强的可控制性,能确保车辆稳定运行。因此成了现代轨道交通不可缺少的制动方式。
二、现代轨道交通车辆电气牵引技术分析
一种牵引电动机利用多对致动器被电激励而产 生周期步进牵引使电动机轴有力的旋转或线性定位。因无滑动摩擦从而机械效率高和寿命长。各致动器受高效电激励系统而定位比较大面积的牵引元件[2]。各压电致动器具有多层剪切变形的压电材料。不需常规的轴承和润滑剂,能满足于工作在强磁场和强离子辐射环境。该牵引电动机能从微观级到很大 等级的范围,已证实定位精度为毫微米级。城市化建设不断加快的同时,对交通运输行业也带来了较大的压力。现代轨道交通是科学技术快速发展的产物,在很大程度上可以解决城市交通紧张的问题。电气牵引技术作为现代軌道交通关键技术之一[3],起到的作用是非常显著的。以下是本文对该技术的具体分析。
(一)电气牵引技术控制系统分析
轨道交通车辆中的电气牵引技术是非常重要的,在电气牵引技术的辅助下可以实现数字控制到计算机控制的转变。在计算机控制系统的帮助下,可以对轨道交通车辆的运行方式进行监控,因此,该控制方式带有较强的信息化特征。计算机控制系统的优势较多,其中较为显著的优势就是可以实现自我检查和自我控制。计算机控制系统尤其是在交流传感式轨道交通车辆中得到了更加广泛的应用。现代轨道交通车辆中在使用电气牵引技术时,离不开多重微机,高水平自动化控制的实现离不开多重微机的辅助[4]。计算机控制系统是电气牵引技术中非常重要的部分,可主动控制牵引信号的输入和输出,在信号处理器的辅助下,实时控制车辆牵引。计算机控制系统起到的作用是非常巨大的,对整个电气牵引技术来说,主要起到整体性作用,在计算机控制系统的辅助下可以为电气牵引系统提供完整性的配置。其中计算机控制系统中非常重要的部分就是相应软件,在具体软件的支持下,可开展多项任务,如驱动任务、通信任务等。计算机控制系统可以实现对全部轨道交通车辆控制的前提就是依靠管控电气牵引技术中的诸多模块,不同模块相互组合形成了集成化的控制系统。
(二)电气牵引技术主要元件分析
现代轨道交通车辆中的电气元件需要在电气牵引中反复磨合,在不断磨合的过程中可以提高各个元件之间的配合程度[5]。其中电气牵引技术中涉及的元件类型较多,其中比较重要的电气元件有断路器、受电器以及接口电器。
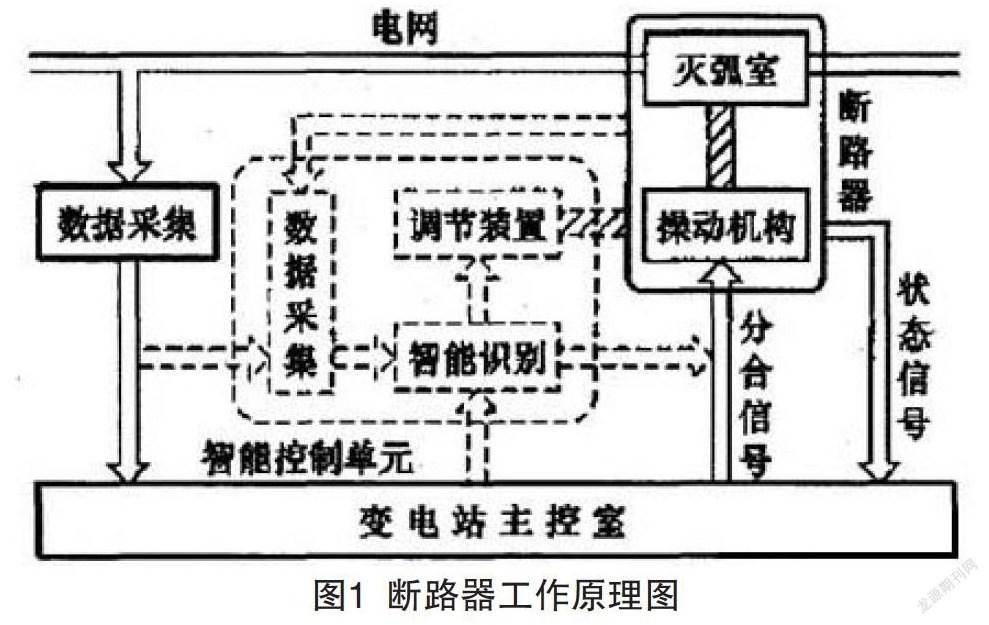
1. 电气牵引技术中的断路器
断路器是电气牵引技术中不可缺少的重要元件。紧急阻断是断路器的主要功能。断路器在现代轨道交通车辆中的潜力巨大。特别是电气牵引技术越来越高的信息化程度,导致断路器在市场上的占有率不断攀升。电气牵引技术中有效应用断路器在电气牵引技术中的妥善应用可促使制动分段时间显著降低,能在最短时间内对轨道交通进行控制和调节,将电流阻断时的危险系数明显降低[6]。断路器在电气牵引技术中的应用越来越完善,能进一步提升电气牵引技术在现代轨道交通车辆中的应用效果。其中断路器工作原理图见图1。
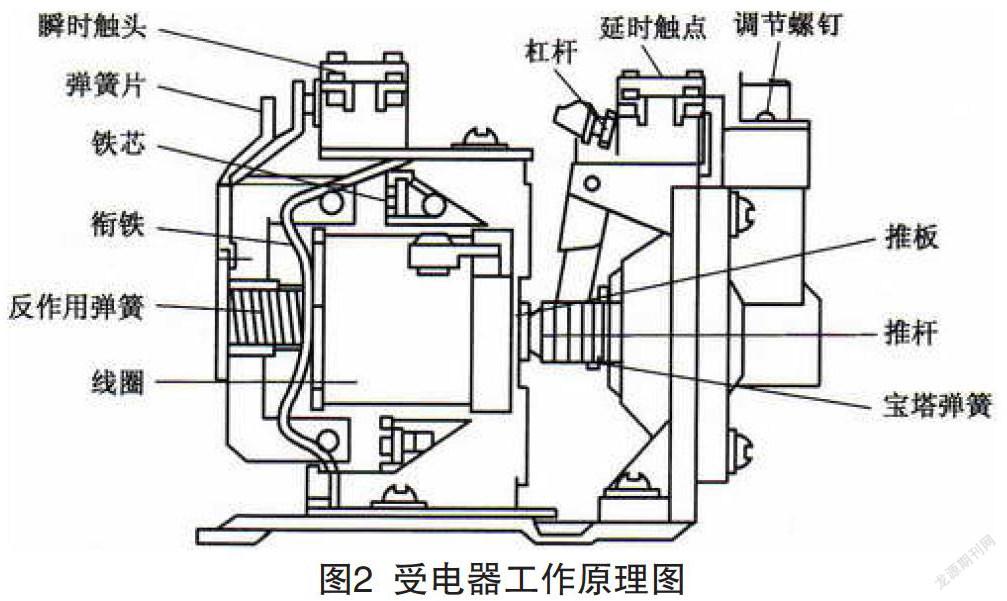
2. 电气牵引技术中的受电器
电气牵引技术中重要的元件之一就是受电器,现代轨道交通车辆对于受电器有较高的要求,因此受电器要想在电气牵引系统中发挥自身的作用,首先需要确保自身的性能优良,满足第三轨稳定滑动的要求[7]。现代轨道交通车辆的运行速度不断加快,此时需要受电器的第三轨稳定要求符合相关规定,只有这样才能确保电气牵引自身受力在安全范围之内,避免磨损值较大问题的发生,受电器直接影响电气牵引技术的受力情况,只有在牵引受力平衡的情况下,才能保障受电器的强度和性能符合要求。自调节受电器是目前我国积极研发的新型受电器,此种类型的受电器配合电牵引技术,具有较强的稳定性,可将受电器在电牵引系统中的压力极大缓解。其中受电器工作原理图见图2。
3. 电气牵引技术中的接口电器
接口电器需要与电气牵引技术要求相一致,只有这样才能保障接口电器在现代轨道交通车辆中发挥原本的作用[8]。现代轨道交通车辆电气牵引中常见的问题就是接口电器的不匹配性。因此,基于该方面的问题需要进一步提高接口电器与电气牵引技术的高度匹配性,以免因接口电器影响电气牵引技术有效性的体现。
(三)电动机交流式牵引技术分析
现代轨道交通车辆电气牵引技术离不开电动机的大力辅助,永磁电机在电力牵引技术中发挥着重要的作用,因此,要想确保电气牵引技术在现代轨道交通车辆中的应用效果,就需要保障电动机性能的良好。永磁电机有较高的效率,它的额定效率可以达到最新国标的1级效率,与三相异步电动机香波,效率提升了3%~5%,低负载效率提升更加明显。此外永磁电机功率因数、节能回报较高,所需电流较小,不需要无功补偿,可以减少变压器和电缆等设施的投资。永磁电机温升较低,有较高的启动转矩和过载能力,控制性能较好,因此被应用现代轨道交通车辆中,无疑对电动机交流式牵引来说压力是巨大的。为了将电动机使用的稳定性进一步提升,就需要加大在电动机交流式牵引技术上的资金投入和技术投入,可采用IBGT逆变模式满足电动机交流式牵引技术的供电需求,此种供电模式可确保电牵引技术的正常应用,促使我国的电气牵引技术水平进一步提升。
(四)复合型弓网系统分析
复合弓网系统中的接触轨结构为新型钢铝复合材质,该材质取代了之前的铜材质接触轨。此种新型接触轨材质与原来的接触轨材质相比,电阻数值更小,导电率跟高,载流量更大,耐磨性更好,使用寿命更长,制作成本更低。受电弓结构中的滑块为渗金属碳复合材料,此种材质的滑块寿命可以达到5~25万公里,相比之前的受电弓材质更加可靠。
三、现代轨道交通车辆电气牵引系统
现代轨道交通车辆采用的牵引系统为电气牵引系统是LCU无触点逻辑控制系统,该控制单元下可以实现无触点控制,能确保轨道交通车辆电气控制线路的可靠性。现代电力电子技术和微计算机技术是LCU不可缺少的技术,该控制单元下取代了轨道交通车辆牵引系统中原有的低压电器和迂回线路,具有控制灵活、编程便捷、布线直观以及检修方便等优势。立足LCU无触点逻辑控制系统来分析,现代轨道交通车辆对电气牵引系统有了具体的规定。
(一)0~43.33 km/h是电气牵引技术恒定引力范围,在恒定压力范围下需要配合一定的速度,其中43.33~65 km/h所要配合的恒定速度。通常情况下轨道交通车辆的恒定牵引力一般在345 kN,自然牵引力一般为230.5 kN。
(二)电制动力需要与电气牵引系统高度配合,保障电制动力按照稳定的速度运行,避免电制动力因素影响现代轨道交通车辆的正常运行[9]。
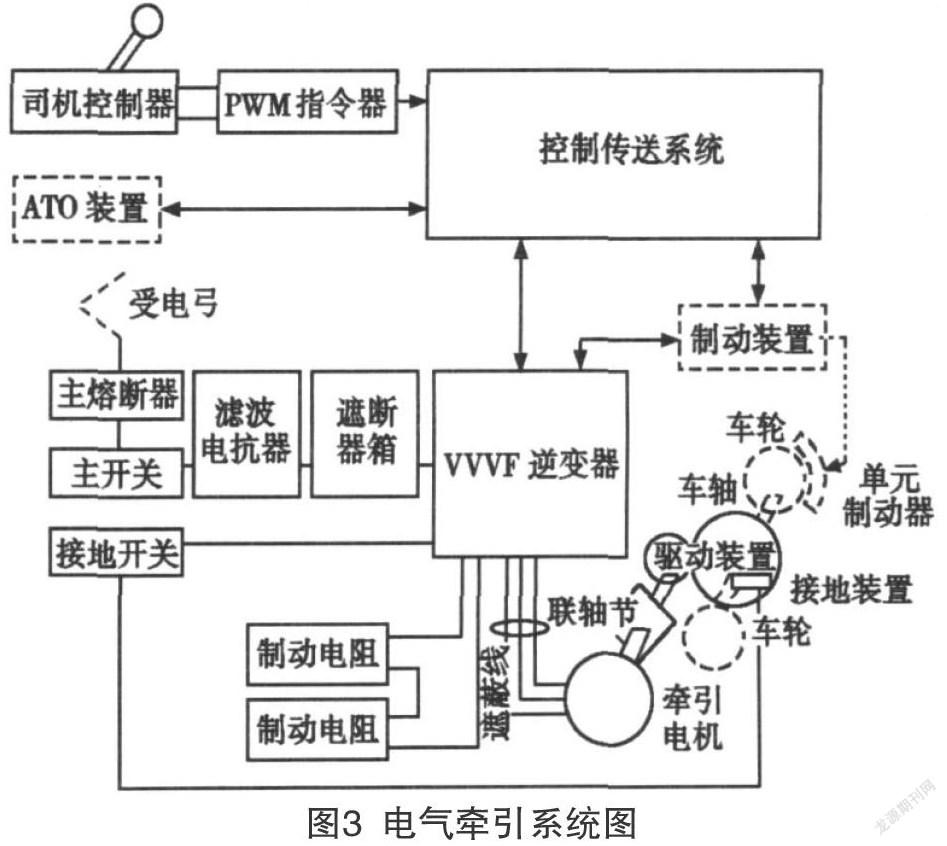
(三)合理设置轨道交通车辆中的电气牵引运行模式,可以依据列车荷载自动调节电气系统的牵引力,构建出在荷载范围内的牵引规范。电气牵引技术与前期牵引系统两者之间的关系是非常密切的,现代轨道交通车辆中合理运用电气牵引系统可将电气牵引技术的作用有效发挥,反过来在电气牵引技术的帮助下,有可以确保电气牵引系统的可靠性。其中电气牵引系统见图3。
四、现代轨道交通车辆牵引中电气控制分析
现代轨道交通中不可缺少的环节之一就是电气控制。轨道交通车辆在正式启动时,在电气牵引技术的支持下,借助电气控制系统可以实现电能和动能之间的转换。电气控制对轨道交通车辆连接电网系统来说可以起到一定的约束作用,能确保电动马达的合理性,以免电动马达在不合理的情况下,出现电能消耗过多的问题。现代轨道交通车辆牵引电气控制中牵引传动控制非常重要。一般情况下轨道交通车辆会提前制定运行方案,工作人员会严格按照拟定好的运行方案,确保车辆的正常运行。电气牵引技术能力与轨道交通车辆运行模式和两站之间的距离有重要的关系,因此,要确保电气牵引技术与轨道交通车辆运行模式的高匹配性,对于电气控制牵引传动中的相关要求,需要工作人员严格对其进行控制,确保轨道交通车辆的正常运行,现阶段我国的牵引传动控制技术还存在相应的问题,因此需要国家政府有关部门加大对该领域的资金支持和技术支持,在借鉴国外牵引传动控制技术的基础上,结合我国国情,设计出国产化的牵引传动控制技术。在牵引传动控制技术的有效支持下推动我国现代轨道交通的进一步发展。
五、结语
综上所述,轨道交通车辆的出现极大缓解了城市交通的压力,电气牵引技術作为轨道交通车辆不可缺少的技术之一,对于轨道交通的发展起到至关重要的作用。以上是本文分析的电气牵引技术在现代轨道交通车辆中的应用情况,希望对该领域的研究有一定的促进作用。
参考文献:
[1]刘艳艳.现代轨道交通车辆电气牵引技术探讨[J].南方农机, 2019,50(24):149.
[2]沈豪,王培昌,曾详旭,袁磊.基于模块化设计的地铁车辆牵引逆变器大修流程优化[J].城市轨道交通研究, 2019,22(12):100-104.
[3]保万全,袁照丹,李士杰,范春利,宁雪松,王久成,王泽华.基于ANSYS Workbench的牵引车后桥桥壳动态特性分析[J].汽车实用技术, 2019(18):123-126.
[4]唐朝辉,唐立国,李宝泉,耿庆厚,王洋.地铁车辆永磁牵引系统与异步牵引系统的对比分析[J].电工技术, 2018(24):142-143+146.
[5]崔垚,王宏宇.地铁车辆电气牵引系统直流侧电流谐波相关分析与研究[J].山东工业技术, 2019(01):45.
[6]徐士强,王学安.关于地铁车辆电气牵引系统的电气控制分析与探讨[J].科技风, 2018(33):113.
[7]曾星瑜.浅析现代轨道交通车辆电气牵引技术[J].中国设备工程, 2018(09):135-136.
[8]崔明强.地铁车辆电气牵引系统的RAMS设计探讨[J].内燃机与配件, 2017(22):128-129.
[9]潘宣伊.论现代轨道交通车辆电气牵引技术[J].科技经济市场, 2017(11):30-31.
