智能垃圾车自我控制装置设计
2020-09-10殷凤来韩杨硕雷歌
殷凤来 韩杨硕 雷歌


摘要:本文主要以STC98C52单片机为主控芯片,搭建了智能汽车自我控制装置系统,论文主要阐述了自我控制装置的基本组成部分和工作原理。智能汽车自我控制装置主要包括传感器、触发装置、控制系统等。智能汽车在工作环境内主要通过红外线感应器检查目标位置信息,并将这信息不断传输给控制系统,控制系统根据信息的不同不断调整状态使下车到达目标位置,此时启动触发装置控制机械臂进行拾起工作。
关键词:路径识别;自动驾驶;智能车;单片机
0 引言
随着旅游业的不多发展,越来越多的人喜欢上了旅游,可是好多旅客在景区游玩过程中总是在不经意间乱丢垃圾,破坏环境卫生。据统计今年“十一”假期,黄山风景区仅10月3日一天进山的游客就接近四万五千人。黄山风景区党工委宣传部宣教科科长侯晏表示,黄金周不仅游客数量大增,景区垃圾量也几乎有平日的两倍。侯晏说:“平时15吨/日左右,周末20吨/日左右,黄金周长假最高峰可达30吨/日左右。”这样给景区的环卫工人带来了巨大工作量,也大大降低了景区的环境质量,因此本文提出了一款智能车,本款智能车可以根据环境自动清理工作范围内的流动垃圾。这样就可以及时清理旅客随手丢掉的垃圾,减轻景区环卫工人的工作压力,同时又可以减少财力物力的浪费提高旅游区的质量等级。
1 工作原理
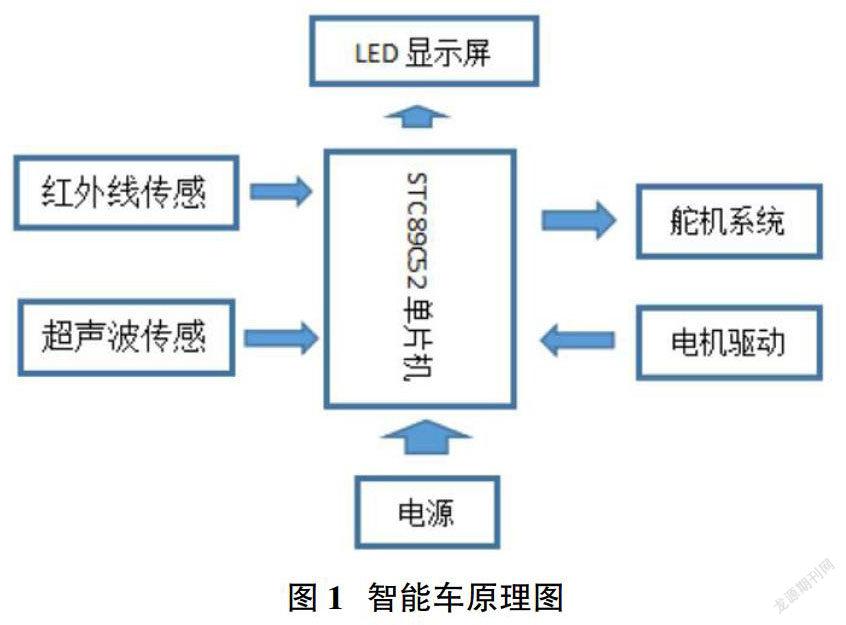
智能垃圾车自动控制装置主要分为两大板块,如图1所示,分别为红外线与超声波混合自动驾驶板块、单片机控制机械臂拾取板块。
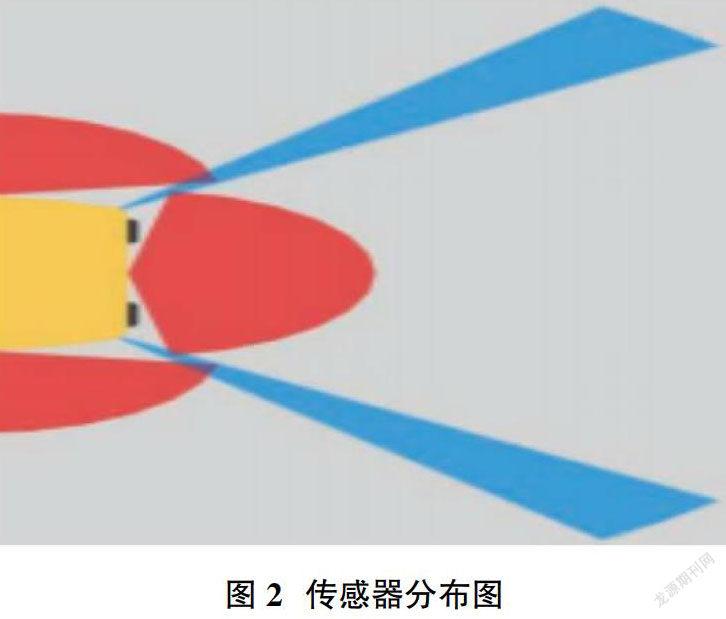
红外线与超声波混合自动驾驶板块主要有红外线传感器、超声波传感器、控制系统和驱动系统组成。其中红外线传感器板块和超声波传感器采用购买现成的产品,本板块主要是通过红外线与超声波的优缺点互补来进行工作。主要利用超声波来探测周围环境物体,再结合红外线探测的移动物体来对工作环境的确定以及目标物体的定位,也是依据超声波来检测距离并通过红外线进行确定方向,电机和电机驱动部分的直流减速电机主要由L298N电机驱动模块来控制。[1]移动装置设计为前轮确定以及控制转向,通过STC98C52单片机主控芯片根据红外线与超声波传感器接受的信号做出判断,分析小车的动作要求,发送相应的动作命令给电机驱动模块,控制小车实现转向,同时发送至显示屏,并执行命令完成相应动作,达到目标地点。在小车确定目标后,小车主要依靠两边的红外传感器,如图2所示,进行对目标位置的目标移动,在运动过程中当左边检测到运动障碍物时,单片机会控制舵机顺时针转动,并计算转动时间,因为舵机主要控制车轴旋转,来促使小车向右方转向,当左边检测的障碍物消失时单片机会控制舵机逆时针旋转相同时间使小车恢复最初状态,如果移动装置的右边传感器检测到运动障碍物时,主控芯片控制舵机逆时针转动,并计算时间向左方转向,当右边检测的障碍物消失时单片机会控制舵向同时间使小车恢复最初状态,当前面有运动障碍物时则规定车停止运动。直到障碍物消失,再开启运作以达到目标地点。
单片机控制机械臂拾取板块主要有触发系统、驱动系统和舵机组成。[2]工作原理是通过STC98C52单片机对多个舵机的控制,实现机械臂的弯曲、张开、闭合、旋转等动作完成物体的抓放,主要机械臂的运作全部取决于红外线与超声波混合自动驾驶板块是否完成,当红外线与超声波混合自动驾驶板块完成之后控制系统向单片机控制机械臂拾取板块的控制系统发出电信号激发触发系统控制各各舵机旋转及复位同时。其过程是固定不变的。当单片机控制机械臂拾取板块完成后通过触发系统发出电信号激发红外线与超声波混合自动驾驶板块启动使小车回到出发点。
机械臂简图如图3所示,五路舵机控制机械臂,其中1、2、3、4、5表示为5路舵机,1路舵机主要控制转向来对整个机械臂的控制,2、3、4路舵机主要是对机械臂在拾取过程中灵活度的控制,5路舵机主要是控制齿轮来实现机械手的张开与闭合。五路舵机对实现目标物的抓取工作主要是依据智能车的高度以及每个舵机的位置来确定旋转角度实现拾取工作。
2 组成结构
智能垃圾车主要组成结构有红外线寻迹模块、超声波定位模块、单片机主控制模块一、单片机主控制模块二、驅动模块这五大模块组成,其垃圾车的运作主要靠这五大模块相互配合实现的。
2.1 单片机主控制模块一
该模块基于单片机 STC89C52 设计的智能车,需供
+12V和+5V电源,为单片机及电机提供驱动电压。该模块主要作用是给舵机以及传感器提供稳定的工作环境,来确保在工作中的流畅性,其功能主要根据红外线传感器和超声波传感器提供的数据进行处理,驱使电机驾驶小车到达预定地点。[3]
2.2 红外线寻迹模块
本文采用E18-D80NK-N红外线传感器来充当智能车的“眼睛”,当红外线检测到前方无障碍时传感器就会输出高电平,当红外线检测到有障碍时输出口电平会从高电平变成低电平,传感器检测到这一信号就可以确认正前方有障碍物,并传送给单片机,我们通过这个原理来确定工作环境以及目标点的确定。主要工作原理是通过红外线传感器接受外部信息,以5秒为计算单位,传输给单片机,当工作环境出现目标时以三个单位时间确定最终目标,最后单片机通过输入内部的算法,协调小车两轮工作,从而完成追踪动作。
2.3 超声波避障模块
测距模块通过超声波发射装置发出超声波,根据接收器接到超声波时的时间差计算距离。超声波发射端在单片机前置电路的驱动下工作,接收端的信号放大、整形后在单片机的中断口产生中断,通过发射和接收的时间差计算出小车与目标的的相对距离。这里为了单片机控制机械臂拾取板块能够实现,我们设定当相对距离在10-15cm时,发出终止程序传递信号给单片机主控制模块二完成下一动作。
2.4 单片机主控制模块二
该模块基于单片机 STC89C51,该单片机可以有6个PWM脉冲输出,这样就可以实现对6个自由度机械臂的控制,其控制原理主要通过单片机发出指令给驱动系统,驱动系统执行命令同 时反馈机械臂运行现状,来实现信号的控制。该板块有程序简单不需要收集外部信息,每一次触发后各路控制都是唯一不变的。该模块与单片机主控制模块一需要的电压电源一样,工作环境相同。在控制舵机时主要通过直流电来控制舵机运转,根据电流的正负值来对机械臂进行复位,实现舵机在抓取实物后可以恢复原有状态。(图5)
2.5 驱动模块
该模块主要由电机和舵机组成与单片机相连,主要负责小车的行驶方向以及机械臂的运作,主要通过单片机处理后的命令来操控电机及舵机的运作与停止实现自动驾驶及自动拾取作业。
3 结语
本文对目标物拾取工作的核心部件主要有红外线传感器,超声波传感器以及舵机,E18-D80NK-N红外线传感器具有很高的精度,价格成本低、体积小等优点;超声波传感器其频率高,波长短具有很强的方向性等特点以及舵机具有很强的转矩可以对较重物体进行抓放;STC98C52单片机与电机驱动芯片的结合,使单片机在工作中得到良好的工作环境,让实现对目标物拾取工作得到了保障,最后对该功能进行了程序编写,并进行了仿真实验,验证了工作的可行性。
参考文献:
[1]唐渊,周汝,段武斌,刘臻.基于单片机控制的红外线与超声波混合避障智能小车[J].中国设备工程,2018(12):179-180.
[2]张昊,王超亮,田文龙,李擎.同步仿生机械臂设计车[J].兵工自动化,2015(5):77-80.
[3]彭雪峰.直流稳压电源及漏电保护装置设计[J].四川兵工学报,2014(4):99-101.
[4]杨安曌,伍炜,颜奔,赵海茹.基于单片机的远程智能垃圾清理运输车的系统模型研究[J].内燃机与配件,2019(02):233-235.
