用于未来城市交通的自动驾驶汽车方案
2020-09-10M.MNSTERG.KOPPH.E.FRIEDRICHT.SIEFKES
M.M NSTER G.KOPP H.E.FRIEDRICH T.SIEFKES



基于城市车辆模块化平台“未来汽车(NGC)”研究项目的首款样车被设计成具有2+2座位型式的客车。在NGC项目中,德国航空航天中心的科学家们致力于研究未来的交通运输工具,从而制定了不同的车型方案及研究方法,并由此开发出了可供使用的样车。
城市交通;自动驾驶;模块化
0 前言
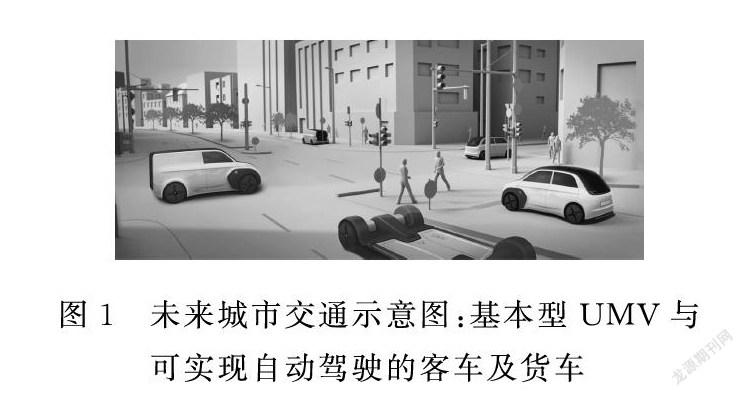
模块化城市汽车(UMV)是1种可用于未来交通运输的技术方案,该车型能用于满足城市内部和城郊地区的运输需求。在模块化平台上不仅可将UMV改装成配有驾驶员座位的基本型、加长型和货运型等衍生车型,而且也能被改装成可实现自动驾驶的全新车型。设计人员对此类衍生车型的长度及高度尺寸进行了优化。车型的长度尺寸可在3.7~4.1 m之间进行调整,其高度尺寸可在1.6~2.3 m之间进行调整。同时,该类车型可通过滑板构件以实现在不同车型结构之间的切换(图1)。
在该车型系列中,基于2+2座位型式的UMV客车(UMV-PM-2+2)已设计出实际样车。在开发这种车型时,设计人员对整车方案、车辆结构、能量管理、动力总成系统、底盘和车辆智能系统等多个领域进行了全面考虑。
在已设计出的客车方案中介绍了1种自动驾驶汽车,该车型可抵达城市内的任意地点,但与地铁或城市客车等出行方式相比,其经济性和运输效率均相对较低。设计人员应针对UMV-PM-2+2车型设计出1种有效的解决方案,以便使乘客在出行时能顺利抵达目的地,由此减少私家车的使用频率。在非交通高峰时期,以铰接式城市客车为代表的大型客车运输效率相对较低,此时PM-2+2客车就是1种较为理想的替代车型。
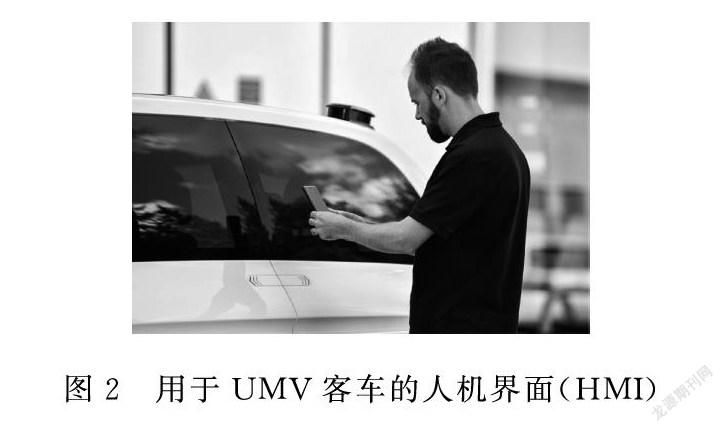
就乘客与车辆之间的人机互动过程而言,一旦乘客所预定的UMV客车到达所指定的载客地点,乘客须通过智能手机和车辆侧窗上的接口进行登录(图2),随后即可自由操纵车门,通过操纵电动控制手柄以打开车厢滑动门。车内乘客和其他行人的安全性是“未来汽车”(NGC)UMV项目研究的核心问题,因此设计人员在车厢内部布设了安全带,并使该车型具有一定防碰撞功能。当乘客确认安全带已插好时,车门就会随即关闭。
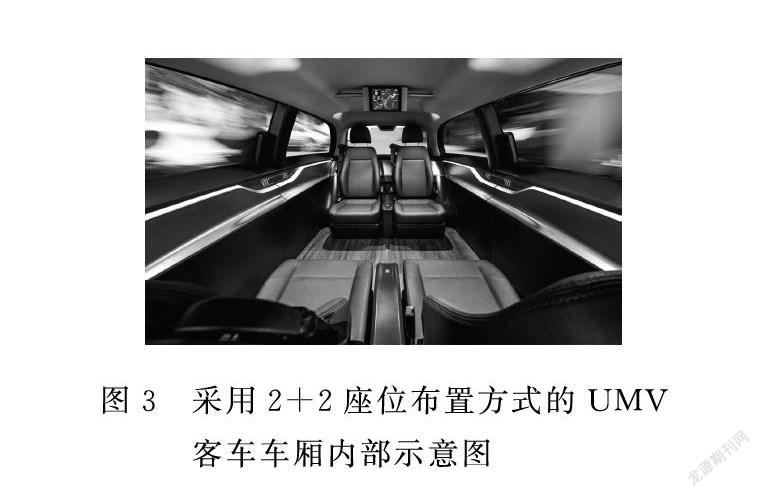
基于相关设计原则,UMV-PM-2+2车辆的内饰设计风格朴素而又简洁。在车顶天花板上配备的2个显示器可为乘客播放旅途信息,如乘车时间及天气预报等,而且还可为其他乘客预告后续的停车站点,从而为所有乘客提供完善和透明的信息(图3)。
1 动力总成系统和车辆底盘
设计人员通过设定,可使UMV车型达到400 km的行驶里程。UMV车型可通过2个30 kW的电机来驱动,电机被集成在后桥上靠近车轮的位置(图4)。UMV客车的动力装置以48 V系统为基础,在已过了相关试验验证后,其结果是样车可满足各类行驶工况。
对于样车而言,其在行驶中会预设1个行驶方向。该车型如驶入无法调头的狭窄道路,经系统测算后,能使整车倒驶一小段路程,从而实现原路返回。设计人员对UMV样车不同的底盘方案进行了研究,重点对高集成底盘和90°转向的操作方案进行了设计分析。同时,设计人员基于客车的技术特点,选择了麦弗逊车桥作为前桥,并以带有桥支座的五连杆车桥作为后桥,由此可充分满足样车的运输需求。同时,设计人员针对货车的技术特点,为其配备了双车桥转向系统。
2 能量管理和车辆智能
在车辆能量管理方面,设计人员针对UMV-PM-2+2客车及相关课题开展了研究。其中1个富有挑战性的课题是开发车辆的新型通风方案及相关运行策略。在车厢内,由于乘客以面对面的方式进行乘坐,须改变车内空气调节的方式。设计人员所采用的1种试验方法是通过气流通道对车内空气进行调节。这些气流通道被集成在车身A/C柱和车顶结构中,并可实现车厢和外界的空气对流。
另外,UMV系列车型能从辅助驾驶状态切换至全自动驾驶状态。UMV的衍生车型是按照相关标准而设计的,并且没有布设驾驶员的位置。UMV-PM-2+2客车还配装了用于识别环境特征和实现环境监测的多个传感器,在车顶布设有4个三维(3D)雷达传感器,全球卫星导航系统(GNSS)天线和车辆互联装置,并在前挡风玻璃上安装了光学传感器;远程和短程雷达模块则安装在前护板上;車尾部也布设有1个雷达系统、18个超声波传感器和2个侧面摄像机。
3 车辆结构和模块化策略
车辆结构和模块接口是目前UMV车型最受关注的研究课题。所有的UMV衍生车型应尽可能多地使用通用度较高或技术较为成熟的零件[1]。前车车厢、车厢地板和后车车厢作为车体主要结构部件,可应用于所有的UMV衍生车型。由于UMV衍生车型种类繁多,根据设计人员的开发理念,规定部分构件应采用多材质空心骨架结构型式。车厢的前后部、车身地板,以及过渡处的连接件都采用了直线轮廓,而车身外壳结构型式中的自由成形表面结构已在车身制造过程中得以应用。设计人员在进行开发时,首先应重视车体外部和安装部件。因此,对用于客运的UMV车型而言,其前门和后门均应采用通用度较高的零件(图5)。
在未来的模块化接口试验框架中,德国航空航天中心研究所针对UMV车型的不同优化方案开展了试验。在试验过程中,设计人员在调整车型结构时对模块化策略进行了系统的试验研究,例如将滑板变型结构与驱动板结构进行区分。上述开发过程中的结构调整都是基于UMV系列车型而衍生出的,但该车型仍需提升载质量并实现结构轻量化。目前,设计人员已对相应车型方案从不同用途角度进行了分析。以全新的自动驾驶概念车型Rinspeed Snap和Schaeffler Mover为例,德国航空航天中心研究所的相关设计人员已研究出了改型方案,并开展了一系列试验。相关改型方案包括可将独立车桥模块连接到乘客舱或货舱的底盘结构。然而,由于设计人员在相同的平台上提出了不同的改型方案(图6),其可行性依然有待验证。
在名为“U-Shift”的另一种车辆设计方案中,设计人员分析了用于替代UMV车型滑板方案的U型结构。这种U-Shift方案后续将在德国巴登-符腾堡州经济部的研究项目中由相关设计人员开展进一步研究,并将在2020年内设计出样车模型。
4 结论与展望
UMV客车是德国航空航天中心在交通研究领域内研究的核心产品之一,并且由此引领了不同的技术潮流。未来,设计人员将对车厢通风、自动驾驶、碰撞试验等课题开展重点研究,并针对UMV-PM-2+2试验样车开展相关试验,从而进一步开发可应用于该车型的零部件。
[1]M NSTER M,SCHFFER M,KOPP G,u.a. Modulare karosserie-bauweise für ein stadt-elektrofahrzeug[J]. ATZ,2017,119(5):16-23.
