基于CAN总线汽车智能仪表研究与应用
2020-09-10李有通谭琳陈益庆
李有通 谭琳 陈益庆
摘要:传统仪表采用线束进行连接使得仪表准确度和精确度低,且抗电磁干扰能力弱。CAN总线是一种能进行分布式控制和实时控制的技术,结构简便且通讯度高,可靠性、抗干扰能力强。基于CAN总线进行汽车智能仪表的设计与应用,能提高仪表的工作效能,对汽车仪表技术发展有促进作用。文章先叙述CAN内涵及特点,之后对基于CAN总线汽车智能仪表的总体结构设计进行分析,最后对基于CAN总线汽车智能仪表的系统硬件进行全方位阐述,以供参考。
关键词:汽车智能仪表;CAN总线;结构设计;硬件设计
0 引言
微型计算机和电子制造业的发展,给车载智能仪表的研发带来了机会。现代汽车在研发过程中越来越多地应用高科技技术,使汽车的安全性能越来越高。为了使驾驶员能对汽车运行信息进行全面掌握,基于CAN总线进行汽车智能仪表的研究成为汽车仪表研发的趋势。
1 CAN概述
1.1 内涵
CAN是多主方式的串行通信系统,位速率强、抗干扰性能强,属于现场总线的一种形式,在国际上应用比较广泛。CAN总线技术最早是德国公司研发,应用目的是解决汽车控制器存在的问题。将CAN总线技术应用于汽车运营的局域环境内,可以通过CAN内含的微型控制通讯设备,实现汽车各设备之间的数据交换,将汽车运行过程中的数据形成一个网络,并为分布式控制和实时性控制提供网络信息支持。
1.2 特点
CAN能快速检测出错误,因支持分布式控制和串行通讯网络,被广泛应用于汽车传感器系统,主要包括CAN2.0A和CAN2.0B。其中CAN2.0A主要通过数据帧进行各设备信息的传递,通过远程帧进行各设备单元信息和数据请求的处理,通过出错帧进行总线信号是否出错的检测,通过超载帧的标志和特定符号等来呈现是否有错误。CAN2.0B通过标准帧信息的11个字节进行信息展示,其中一个字节是1的帧信息,2字节是2和3的报文识别码;通过扩展帧的13个字节的信息进行信息展示,其中,2字节主要是29位数字有效,且由2-5的报文识别码组成,而3字节远程帧操作无效,是由6-13数据帧的信息组成。
2 基于CAN总线汽车智能仪表的总体结构设计
2.1 功能分析
基于CAN总线汽车智能仪表的设计总方案是对系统功能、系统可靠性、实现性进行整合后总结出来的最合理方案,决定了后续设计的顺利性。在功能上,汽车智能仪表是对车速、蓄电池电压、发动机转速、里程数、燃油量等进行综合显示的仪器。同时对汽车运行过程中的车载装备工作情况进行监测,在发现异常时会进行报警或强行制动,避免发生故事。其报警功能一般是图标结合灯光闪烁、语音报警。用户在应用时,可以根据自己的喜好进行仪表界面的设计,使智能仪表更具个性化。
基于CAN总线汽车智能仪表还具备拓展接口,可以根据用户的需求进行数据下载。CAN总线汽车智能仪表每个模块都有自己的工作准则,在遵循工作准则的基础上实现系统所有功能。为了实现仪表系统的信号采集、传输、处理和存储等,需要在设计时对资源合理分配,以使操作简便,使系统工作效率更高。
2.2 框架设计
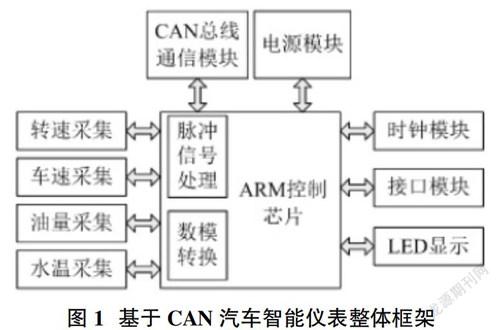
基于CAN总线汽车智能仪表的整体设计是先进行数据采集,再进行数据传送。采集的数据主要包括汽车运行过程中的水温、油量、车速相关数据,数据传送主要是将采集到的信息传送至主控制芯。在完成数据采集与传送后,接收数据的主控制芯对大量数据进行整理和分析,归纳出结果,显示在智能汽车仪表的显示屏上。通过屏幕上信息的显示,驾驶员能了解汽车运行过程中水温、油量、车速等各种信息,以根据需求进行驾驶调整。具体框架如图1所示。
3 基于CAN总线汽车智能仪表的系统硬件
3.1 硬件总体方案
人们生活水平在提高,精神追求也相应提高,在加强汽车的过程中,要求更高的舒适性和可靠性。研发人员在进行汽车设计时,将丰富的电子设备应用于汽车上,但设备过多,信息过于庞大,使信息数据的采集、传输、处理都变得更复杂,也会增加设备的故障率,增强维修的困难。而CAN总线的高性能性实现了车内设备之间信息的有效传递和处理,成为智能仪表的重要支撑。基于CAN总线的汽车智能仪表在工作时对各点的数据进行接收和传输,之后通过转换再做出判断和命令。以图像显示的数据,是先对数据接收和处理,再转换成图像形式,最后显示在显示器上,使驾驶员掌握汽车运行时的所有车况信息。
3.2 车速信号采集设计
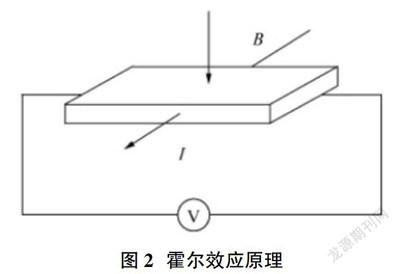
驾驶员在驾驶汽车时,对车速的掌握利于提高驾驶的安全性。基本CAN总线的车速信号采集一般选取霍尔式传感器进行测速,以提高车速测量的灵敏度和抗干扰能力。具体设计和工作原则如图2所示。
根据霍尔效应原理,在设计汽车智能仪表时,先在变速器内安装好磁传感器,目的是感应车轮在转动时产生的脉冲信号,并进行记录,以过测定和计算脉冲信号估算车速,之后再传回传感器,发送加主控芯片。
3.3 油量信号采集设计
汽车智能仪表的重要功能是记录油量,以为汽车顺利运行提供动力支持,并了解最安全的行驶距离。此段探讨的是通过浮子传感器进行油量的采集。浮子传感器油量采集系统主要由浮子、浮子臂和滑动变阻构成。在采集工作进行时,浮子随着油箱中的油量的变化而来回浮动,进而记录油量指数,并传递给相应的设备。在进行油量信息采集时要考虑电压,使电压的输出信号在0~12V之间,以保证油量采集的正确率。
3.4 CAN通信设计
CAN通信模块主要是由收发器和控制器组成。其中,收发器是对信息进行收集和发送,之后传送给控制器。控制器是对信息进行接收,并通过设定的通信协议进行通信,完成指挥工作。基于CAN总线的智能仪表的接口主要包括初始化子操作程序、发送子程序、接收子程序。初始化程序是通过CAN控制器读入相应的控制字,之后再确定工作方式。初始化程序包括电复位、硬件复位、软件复位三种形式。汽车在运行期间,可以通过向CAN控制器发射复位请求后再进行程序的具体操作。CAN控制器内部具备双重缓冲的设置,能对数据操作进行缓存。CAN改变了传统节点地址编码操作方式,拓展了数据编码方式,是汽车智能仪表的发展大方向。
3.5 CAN系统抗干扰设计
汽车在行驶过程中受各种因素影响,外部因素有温度、湿度等,内部因素有汽车电子设备的电磁干扰等。因此,基于CAN总线的汽车智能仪表研究要考虑所有干扰因素,并通过设计排除干扰因素。CAN系统抗干扰设计主要是通过低噪音电路设计和噪声耦合设计结合减少汽车运行过程中的干扰因素的产生,同时提高智能仪表对信息的敏感度。抗干扰硬件设计时,可以利用宽电压输入,目的是减少电源对信息传输的干扰,同时在电源上安排电容滤波电网,提高电源的稳定性。在进行系统操作通道抗干扰设计时,可以选择抗干扰能力强的设备零件,目的是减少通道操作过程中各设备的相互干扰几率。在进行软件抗干扰设计时,可以有效利用看门狗系统,目的是在发生干扰时,能及时进行复位。
总之,在人们对汽车舒适度和可靠性提供更高要求的背景下,基于CAN总线进行汽车智能仪表设计,能使系统更智能化,使信息的采集、处理和共享更精确化,使汽车监控全方位化,能提高汽车各设备的工作效率,促进汽车研发的健康发展。
参考文献:
[1]江學焕,张金亮,樊红莉,高云,王志虎.基于CAN/LIN双总线电动汽车数字仪表系统的设计[J].计算机工程与科学,2015(11):2182-2187.
[2]王襄.基于无线传输技术的汽车智能仪表设计[J].电子测试,2015(22):20-22.
[3]盛吉照.无线电传输技术在汽车智能仪表设计应用[J].科技经济导刊,2016(23):41.
[4]朱晓红.基于无线传输技术的汽车智能仪表设计[J].机械设计与制造工程,2016(10).
[5]陈小虎.基于CAN总线和KE06芯片的控制模块设计与实现[J].内燃机与配件,2019(02):214-217.
作者简介:李有通(1986-),男,四川广安人,本科,讲师,研究方向为汽车电子、汽车维修;谭琳(1968-),男,四川邻水人,本科,副教授,研究方向为汽车维护、汽车设计;陈益庆(1987-),男,四川邻水人,硕士研究生,讲师,研究方向为汽车电子控制及汽车系统动力学研究。