足式机器人液压系统发展现状
2020-09-10李华莹晁智强强一飞魏伟李勋
李华莹 晁智强 强一飞 魏伟 李勋


摘要:液压系统是液压足式机器人运动的核心。通过综述现有典型液压系统,发现其液压系统的优缺点,有助于之后开发新型液压系统,弥补现有液压系统不足。因此本文从提高液压系统能量利用率、提高机器人续航能力的角度对比分析各种典型液压系统,归纳现有模型的新型方法以及存在的问题,总结液压足式机器人液压系统的未来发展方向。最后以现有模型为基础,总结并探讨了机器人液压系统可借鉴的创新技术。
关键词:液压系统;节能;续航
0 引言
轮式、履带式运动方式是车辆、机器人及其它运动机构最常见的机械运动形式。轮式运动阻力小、速度快,在平整路面具有不可比拟的优势。履带式的运动方式在大型工程设备上更为常见,其具有与地面接触面积大、可提供摩擦力大等优点,有助于设备在土地较为松软、摩擦力需求大的场合工作。但是这两种运动形式在运动过程中均与地面连续接触,因此只能通过有限不平度的地形。而足式运动方式作为自然界生物运动的典型形式,非常适合在路况复杂、坑洼较多(比如山地、丘陵以及雪地等)的地形下行动。相较于轮式、履带式运动,足式运动主要有两大优势:首先,足式运动的落脚点为离散式的,相较于轮式、履带式运动更有利于越过障碍物,更适合于地形条件复杂、地面软硬程度相差较大的环境;其次,足式运动有多肢节、多自由度特征,能够减小振动、提高运动平台的稳定性。
液压足式机器人是足式机器人的典型代表。足式机器人液压系统是其实现其各项功能的基础。
1 足式机器人液压系统发展现状
液压机器人能够在复杂地形环境中可靠行动,相较于轮式、履带式机器人具有不可替代的优势。随着现代社会的发展,抗险救灾、野外军事行动、航空航天等特殊任务对于液压足式机器人的能力要求越来越大。于此同时,计算科学、控制科学的迅速发展使得液压足式机器人的快速发展成为可能。
1.1 国外足式机器人液压系统发展现状
从20世纪60年代开始国外研究机构对液压机器人进行了广泛的研究,并制作了一系列的实物样机[14]。图1展示了从20世纪60年代开始国外研究者制作的各种类型的液压机器人。从图1中可以看出,经过多年的发展,液压机器人体积减小、重量减轻,而运动能力也有较大的提升。
1.2 国内足式机器人液压系统发展现状
BigDog等液压足式机器人的成功在国际社会上引起了液压足式机器人的发展热潮,各个国家的研究机构设计出各有特点的液压足式机器人。相比之下,中国对于足式机器人的研究起步较晚,最初集中在电动足式机器人的研究上。在2011年国家863计划的推动下,国内高校相继成立了专门的研究队伍对液压足式机器人进行研究。在科研人员的努力之下,北京理工、山东大学、国防科大、上海交大、哈工大等高校成功研制出各自的液压足式机器人。
1.3 总结
综合各向指标而言,由于我国对于液压足式机器人研究起步较晚,关键元器件制造存在差距等原因,在负重能力、运动速度、运动平稳性、环境适应性等方面与国外液压机器人相比存在较大的差距[16]。从技术层面分析,两者之间的差距主要存在于:
1.3.1 硬件加工制造技术差距 主要原因是小型液压缸设计制造技术(包括相应材料加工技术)、高频率响应伺服阀设计制造技术、伺服控制技术及液压回路信号检测技术等较为落后。
1.3.2 液压系统元器件匹配问题 在机器人液压系统中,各个元件都发挥着至关重要的作用。当某些元器件流量、压力参数与液压系统的要求不相匹配时将无法发挥系统最大的效率,直接影响到整个机器人的运动品质。
1.3.3 液压系统效率较低 该问题的主要原因是没有针对液压足式机器人液压系统的特点进行重新设计或采取其他有效措施,导致液压系统供油压力与执行机构所需压力极度不匹配。
2 足式机器人液压系统最新进展
传统的液压足式机器人已经能够实现自主行走、跟随前进、跨越障碍等多种功能,但是其液压系统的瞬时功率与执行机构需求不匹配的问题极大的影响了液压足式机器人续航能力。针对这个问题,研究人员提出了各种各样的方案。
2.1 多执行器协同动作
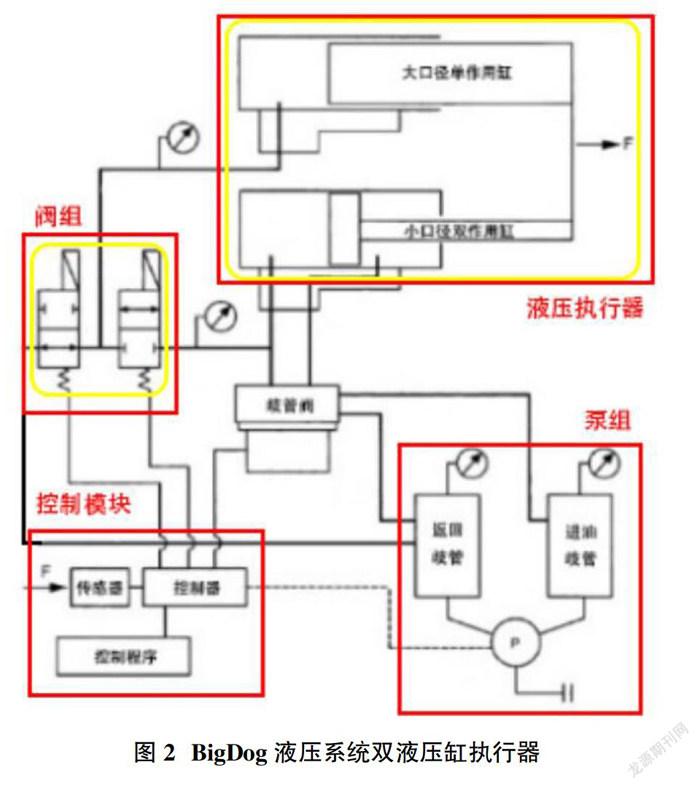
2.1.1 双缸执行器协同动作
BigDog是较早考虑液壓系统功率匹配问题的一款液压足式机器人。如图2所示,BigDog采用双缸液压执行器驱动关节,在一定程度上缓解了功率不匹配的问题。但是双执行器的设计导致了执行机构质量较大、泄露严重,不利于机器人在野外长时间工作。
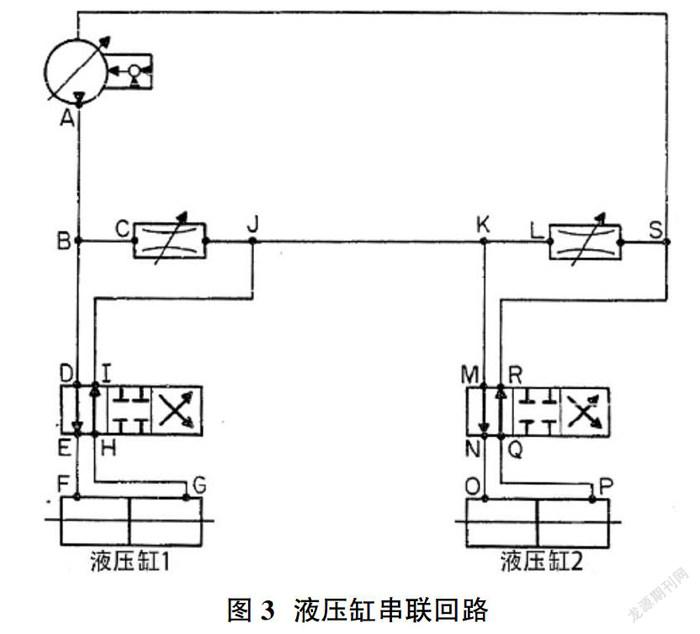
2.1.2 串联执行器协同动作
国外研究机构通过研究提出液压缸串联的方式提高液压油在回路中的利用率(图3)。由图3可以看出,当液压缸1不动作时,液压油通过节流口C进入到液压缸2中,一定程度上改变了原液压系统液压缸不动作时液压油直接排入油缸造成浪费的现状。但是在两个液压缸同时停止动作时,液压油同样会通过节流口C、L流回油箱,造成整个液压系统的功率损失。除此之外,由于液压缸在同一回路同时驱动两个液压缸,控制较为复杂。
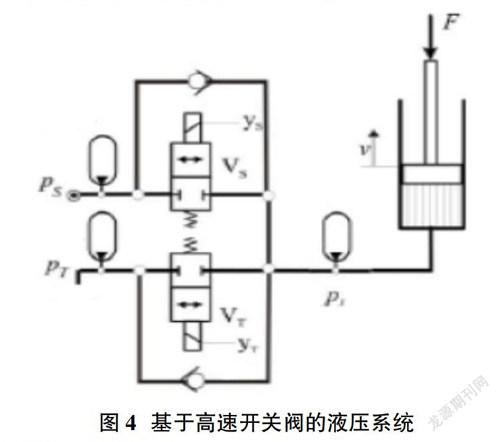
2.2 基于高速数字开关阀的PWM调速系统
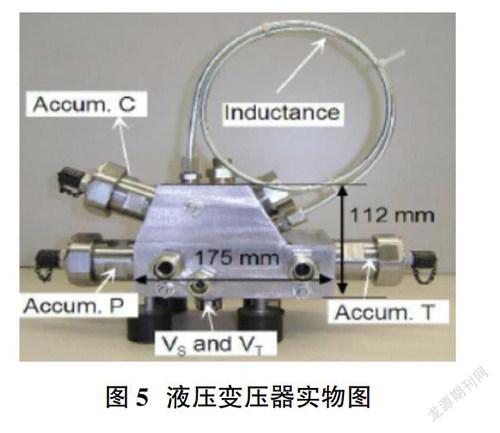
意大利理工学院的Shuang Peng和Emanuele Guglielmino针对HyQ液压系统效率不高的问题,提出了一种基于高速数字开关阀的PWM调速系统,如图4所示。该系统利用高速开关阀代替普通伺服阀,通过对腿部液压缸的精准控制,降低了系统的流量需求,提高了系统的能量利用效率。虽然采用PWM调速系统虽然可以提高能量利用效率,但是其控制难度较大、元器件成本较高,不利控制机器人生产成本。同时,他们还提出了利用液压变压器(图5)控制油压的方法,提高液压系统功率匹配程度,试图从根本上解决液压系统功率与执行机构需求不匹配的问题。该方法具有较好的效果,但是液压变压器及其惯性元件体积、质量较大,而机器人负重能力有限,难以适应液压足式机器人野外负重的要求。
2.3 变面积液压缸
国防科技大学薛勇[3]参考BigDog多液压缸驱动同一关节的设计提出了一种变面积液压缸。该液压缸机构设计与BigDog双液压缸设计理念极为相似,但是集成程度更高、机构更复杂,通过仿真实验,发现该方法可以提高系统功率与执行器需求的匹配程度。但是该方法采用多组液压缸集成的方式,需要很高的元器件加工、装配精度并且可维护性不强。
2.4 双级供能液压系统
除变面积液压缸设计外,薛勇团队还提出了双级供能液压系统,如图6所示。该系统的亮点在于系统中同时包含一个小流量高压泵(定量泵)和一个大流量低压泵(变量泵),可以向腿部关节供给不同功率的液压油,提高了系统功率与执行器需求的匹配程度。
在工作过程中,小流量高压泵向各小型蓄能器供能,保证小型蓄能器能够随时推动执行液压缸进行工作。在机器人运动过程中,由小型蓄能器向支撑关节短时供给高压油,由大流量低压泵向摆动关节供油,保证了机器人的各项运动指标。同时在高压回路添加蓄能器的做法,提高了整个液压系统的抗冲击能力,实现了部分能量的存储和回收,提高了系统的能量利用效率。
但是,薛勇团队通过分析发现,在机器人腿部摆动过程中不同时刻腿部关节所需力矩依旧存在非常大的差距,而仅采用单一大流量低压泵供油的方式很难实现在腿部摆动过程中的功率的精确匹配。因此,在该两级供能液压系统的基础上,薛勇团队又增加了新型液压压力调节器(Fluid Power Converter,简称FPC调节器),该调节器在压力调节过程中能够降低系统能量损耗。带有FPC调节器的两级供能液压系统中,低压大流量泵所产生的油液压力能够根据执行器需求变化实时调节,提高了腿部摆动过程中液压系统功率与执行器需求的匹配状态,从而提高了系统的能量利用效率。
3 总结
液压足式机器人在国外自上世纪80年代开始研制,至今已有几十年的技术积累,相较于初始阶段的液压机器人在重量、体积等各个方面都有了非常大的进步。但是机器人液压系统存在的很多问题也随着研究的深入逐渐成为阻碍机器人发展和使用的关键。虽然很多研究机构针对其液压系统存在的问题提出了各种各样的解决方案,但是没有根本性的解决问题。
相较于国外研究机构,国内研究团队对于液压系统的基础理论研究还存在一定的差距。由于存在研究起步晚、研究理论不完善等问题,国内机器人始终未能走出实验室进入实用阶段。无论是在机器人结构、液压系统设计还是在电器元件制造、选型等方面都存在很大的差距。
在未来,液压系统形式上的创新将会是提高机器人运动能力的关键。虽然现在针对机器人液压系统进行了多种形式的创新,但是没有达到预期的效果,因此,还需要继续针对机器人液压系统进行改进,解决现有液压系统功率匹配程度差、发热严重、续航能力不足等问题。
参考文献:
[1]榮学文.SCalf液压驱动四足机器人的机构设计与运动分析[D].济南:山东大学,2013.
[2]高峰,雷静桃,徐国艳.四足步行机的对角小跑步态及能耗仿真分析[J].北京航空航天大学学报,2007,33(6):719-722.
[3]盛沙.小型四足平台的机构设计与行走控制研究[D].北京:北京理工大学,2014.
[4]宗晓艳.基于虚拟样机的液压四足机器人能耗分析研究[D].北京:北京理工大学,2016.
[5]吴际远.四足步行机动平台动力单元控制系统研究[D].北京:装甲兵工程学院,2014.
[6]丁良宏,王润孝,冯华山.浅析BigDog液压四足机器人[J].中国机械工程,2012(5):501-512.
作者简介:李华莹(1981-),男,辽宁抚顺人,讲师,博士,主要研究方向为装甲装备机电液故障诊断;晁智强(通讯作者)(1967-),男,吉林辉南人,教授,博士,主要研究方向为装甲装备机电液故障诊断。
