基于机器视觉的齿轮端面缺陷检测方法
2020-09-10白斯豪




摘要:为了更好的识别齿轮端面在加工过程中所出现的表面缺陷,本文提出了一种基于机器视觉的齿轮端面缺陷检测方法,该方法将会通过对齿轮端面图像的预处理及识别过程,对端面上缺陷的存在性及缺陷类型进行快速且准确的识别。同时,为了实现检测方法所需的图像多分类任务,本文对一般的支持向量机分类算法进行了改进,同时,利用多线程编程方法加速了对缺陷图像的分类过程。最后,本文还通过控制单元实现了对不同类型缺陷的识别反馈。经图像分类测试,本文所述的缺陷检测方法对本文所涉及的工件表面缺陷图像的识别准确率可达100%。
关键词:机器视觉;支持向量机;缺陷检测;多线程编程
0 引言
随着国家生产力水平的提高,工厂对各种工件生产的质量要求也有了大幅提升。齿轮作为一种重要的传动件,其生产质量将直接影响机械整体的运行情况。但在齿轮的生产过程中,时常由于各种因素使其端面出现划痕、氧化、斑块等缺陷,从而导致该工件质量不达标。在过去,为了控制齿轮出厂质量,工厂需雇佣专门的质检员对工件进行人工质检。但人眼的识别能力有限,不同的人对工件表面缺陷的敏感程度也不相同,尤其在长时间的连续劳作情况下,人工质检的方法会使检测效率大打折扣,因此,人工质检方法已经不能满足当下的工厂发展需求。基于机器视觉的检测技术是目前世界范围内的热门研究方向之一,该种技术可以利用计算机对工件表面图像进行处理及识别,从而替代过去的人工质检,实现对工件表面的自动化检测过程。
1 图像预处理过程
由于CCD相机直接采集的图像多数会受拍摄环境、相机性能限制等因素的影响,难以直接进行特征提取及分类,因此要对图像进行一定预处理过程,消除图像干扰,加强图像特征,便于后期提取及识别缺陷的图像特征。本文所述检测方法所用的预处理过程,包含图像增强、图像滤波、图像阈值分割等处理过程。
1.1 图像增强
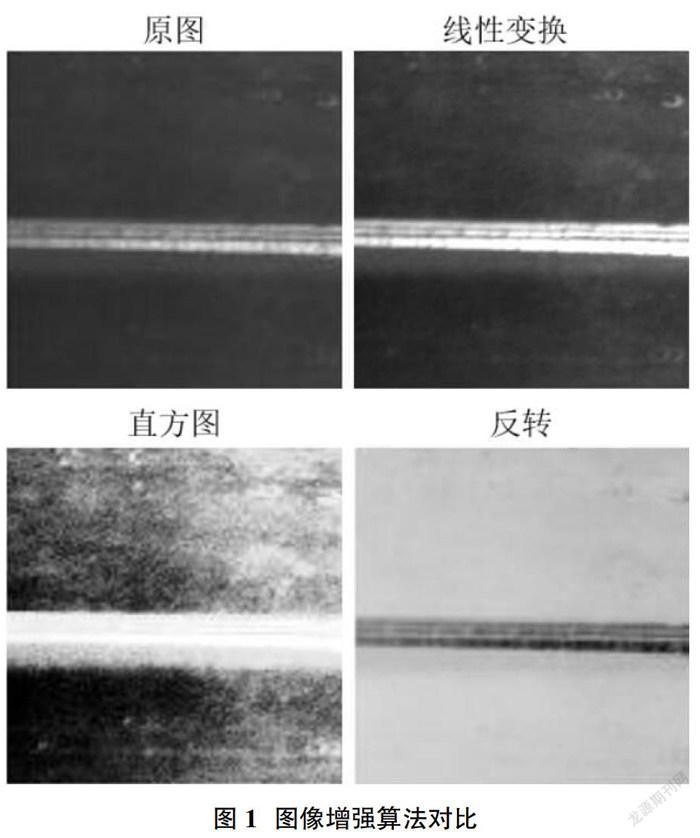
图像增强算法可以从一定程度上提高图片质量,增强图像对比度,从而使图像中的目标区域相对图像背景更加凸显的同时,又可以弱化一些非目标区域图像信息。因此,经灰度增强后的图像较原图会具有更加直观的视觉特征,也更适于分析研究。目前,可实现图像灰度增强的算法较多,各种方法由于其原理和转换方式的不同,所处理的图像效果也会有显著区别。本文采用了几种常用图像灰度增强算法进行了对比,其对应处理结果如图1所示。
观察图1可知,通过线性变换和反转算法的两种灰度增强处理效果较好,但反转图像并没有显著增强图像对比度;经直方图均衡化处理后的金属表面缺陷区域图像对比度有所增强,但图像背景中的纹理对比度也被一起提高,这样的处理效果反而使缺陷区域图像与背景图像更加难以区分。因此,在不改变原图背景与目标灰度特性的条件下,通过对多种算法处理效果的对比,本文采用效果最优的线性变换算法对图像进行增强处理。
1.2 图像滤波
经过图像增强处理后,将进入图像滤波过程,该过程需要尽可能的消除图像中由于环境或硬件设备等原因所产生的图像噪声,从而进一步提升图像质量。为了得到更好的降噪效果,本文针对图像椒盐噪声,分别利用几种滤波算法对图像进行降噪效果对比,其对应处理效果如图2所示。
由图2可知,采用平均值代替某一点灰度值的均值滤波算法虽能降低噪声,但该算法对噪声点的抑制不彻底,同时噪声点周围区域的像素被均匀化后,会使部分圖像细节丢失;高斯滤波算法对噪声点的抑制同样不够彻底,同样无法满足良好的滤波效果;中值滤波算法处理后的图像中,噪点过滤效果较为彻底,同时,该算法对图像细节的保留程度也较好,因此,本文将采用中值滤波算法实现图像滤波过程。
1.3 图像阈值分割
图像阈值分割过程的基本思路是通过设定一个或多个阈值,将图像中各个像素点的灰度值与所对应阈值比较,并根据比较结果实现对图像中的像素点的二值化。即大于该阈值的所有像素点对应灰度值都置为255;小于该阈值的所有像素点对应灰度值都置为0。
常用的阈值分割算法主要有最大类空间方差法、模糊集法、直方图双峰阈值法、最大熵法等。本文利用其中的最大类空间方差法和最大熵法,分别对图像进行了阈值分割处理,效果对比如图3所示。
从图3可知,在对金属表面划痕图像的阈值分割过程中,两种阈值分割算法的处理结果均可将缺陷从背景中分割出来,但最大熵算法所对应图像的右上角区域出现了许多白色噪声像素,同时,该算法分割出的划痕边界轮廓存在很多细小噪点,使得划痕轮廓清晰度明显下降;最大类空间方差算法对应图像的划痕缺陷区域和背景分割较为清晰,且缺陷边界轮廓分割完好,引入噪声像素量较少,因此,本文将选择最大类空间方差算法实现图像阈值分割过程。
2 控制单元设计
为了更好的将图像识别结果反馈出来,本文所述缺陷检测方法还利用单片机开发板设计了专门的控制单元。本文所述控制单元实物如图4所示。
控制单元工作原理如图5所示。当计算机对图像的识别结果为无缺陷图像时,电机将正常工作;当计算机对图像的识别结果为有缺陷图像时,将会通过串口向单片机发送识别信号。当单片机接收到信号后,根据识别信号不同,单片机将会熄灭LED灯组中对应的小灯,提示缺陷类型。同时,单片机也会将继电器状态改变,使电机电源切断,以此模拟工厂流水线的停止,进一步的提示工人及时采取措施。
3 总结
本文提出了一种基于机器视觉的齿轮端面缺陷检测方法。其中,主要对图像的预处理过程及图像特征提取及识别过程进行了详细介绍。同时,本文通过对普通二分类支持向量机分类算法的改进,使支持向量机算法实现了多分类任务,并通过分类测试可知,该分类算法对三种齿轮端面缺陷图像的识别正确率均达到了100%。此外,本文还对缺陷类型分类过程进行了多线程编程,以此来保证分类算法的分类效率。最后,本文通过控制单元的设计,将计算机识别过程的缺陷识别结果通过LED灯组的开关表现出来,同时,当有缺陷图像出现时,控制单元亦可控制电机停机,以此模拟工厂流水线的停止,提示工人采取措施。
参考文献:
[1]罗三定,胡坤,陈远兵,聂振宇.工件表面缺陷检测投影分析与算法研究[J].计算机工程与应用,2015,51(06):50-153.
[2]杨永敏,樊继壮,赵杰.强反射表面缺陷图像预处理[J].光学精密工程,2010,18(10):2288-2296.
[3]周鹏,徐科,刘顺华.基于剪切波和小波特征融合的金属表面缺陷识别方法[J].机械工程学报,2015,51(6):98-103.
基金项目:西安工程大学研究生创新基金(No.chx2019087)。
作者简介:白斯豪(1993-),男,陕西西安人,硕士,学生,研究方向为机器视觉、自动化控制。