基于ADAMS非圆行星齿轮机构应用于机床行业展望
2020-09-10李兆维
李兆维


摘要:利用Solidworks软件,建立了精确的非圆行星齿轮机构三维模型,并使用ADAMS软件对非圆行星齿轮机构进行运动学仿真分析。在此基础上充分掌握非圆行星齿轮机构特点,并据此对非圆行星齿轮机构在数控机床行业的应用前景做以展望。
Abstract: An accurate 3D model of Non-circular Planetary Gear Mechanism is established by SolidWorks software, and ADAMS software is used to carry out kinematic simulation analysis of Non-circular Planetary gear mechanism. A prospect of the application of Non-circular Planetary gear mechanism in CNC machine tool industry is made, which is based on fully grasp the characteristics of Non-circular Planetary gear mechanism.
关键词:自锁;机械无级变速;过载保护
Key words: self-lock;mechanical stepless transmission;overload protection
0 引言
无极调速被广泛应用于数控机床主传动系统,这能够使数控机床主轴在运转过程中自动换速,获得针对不同切削特性工件的合理切削速度。目前,数控机床大多采用交流伺服电机串联机械变速机构,用以实现不同种类数控机床对转速、功率、扭矩等特性的要求 [1]。本文介绍的非圆行星齿轮机构为机械式无级变速装置,可实现自锁,无级变速及过载保护功能,非圆齿轮的特点是结合了凸轮和齿轮的优势,相比其他传动机构的优点是能获得非匀速比,能够以变化的传动比来传递较大的动力[2],另外其过载保护功能可以使其在受到冲击载荷等情况下避免价值量较高的刀具及零件受损,具备较高经济效益。
1 非圆行星齿轮机构的原理
该机构的传动方式属于软启动和软传动的无级变速,主动齿轮动作后,作为动力输入的中心非圆齿轮在动作过程中旋转到节圆较长半轴时其半径与输出端的齿轮节圆相等,机构处于自锁状态实现等比例传动。当数控机床加工过程中由于刀具磨损、工件材质不均等原因导致传动机构输出端所受扭矩加大时,行星圆柱齿轮受负载影响,使其内部弹簧受力,圆柱齿轮和非圆齿轮在同一轴线的弹簧螺旋连接,受力后的圆柱齿轮向相反方向转动,非圆齿轮也跟着向相反方向转动,按行星减速器(WW)机构减速。当负载扭矩超过限定的工作扭矩时,行星架向相反方向转动,中心轴则停止转动,从而实现了过载保护的功能。(图1)
2 基于Adams非圆行星齿轮机构的运动学仿真
在深入了解了机构工作原理和非圆齿轮结构特点的基础上,应用SolidWorks软件建立了非圆行星齿轮机构三维模型(简化了行星非圆齿轮内部部分零件以及柔性体)。对该机构施加不同载荷时,利用Adams软件对其进行建模和仿真,得到了其在自锁、正常工作以及过载保护情况下的几种不同状态[3]。
2.1 自锁
该模型传动形式是2K-H行星传动,属于外啮合(WW)方式,在行星轮架作为从动端的情况下,其传动比达到一定数值时会发生自锁。当给输入端齿轮转速为300 r/min,在不施加外部负载的情况下,由图2中不难发现,该机构运动不到2秒后,非圆齿轮、输出齿轮和行星轮架转速相同,此时机构处于自锁状态。(图中横坐标为时间,纵坐标为角速度,表示非圆齿轮;表示行星架;表示输出齿轮;以下各图同)
2.2 外载自锁
对机构施加外载STEP(time,0,0,0.2,10000)+STEP(time,0.2,0,20,0),在图3中可以发现非圆行星齿轮机构的自适应性,该机构在运动接近5s后非圆齿轮转动某一角度,在固定传动比下处于自锁状态。
2.3 無级变速
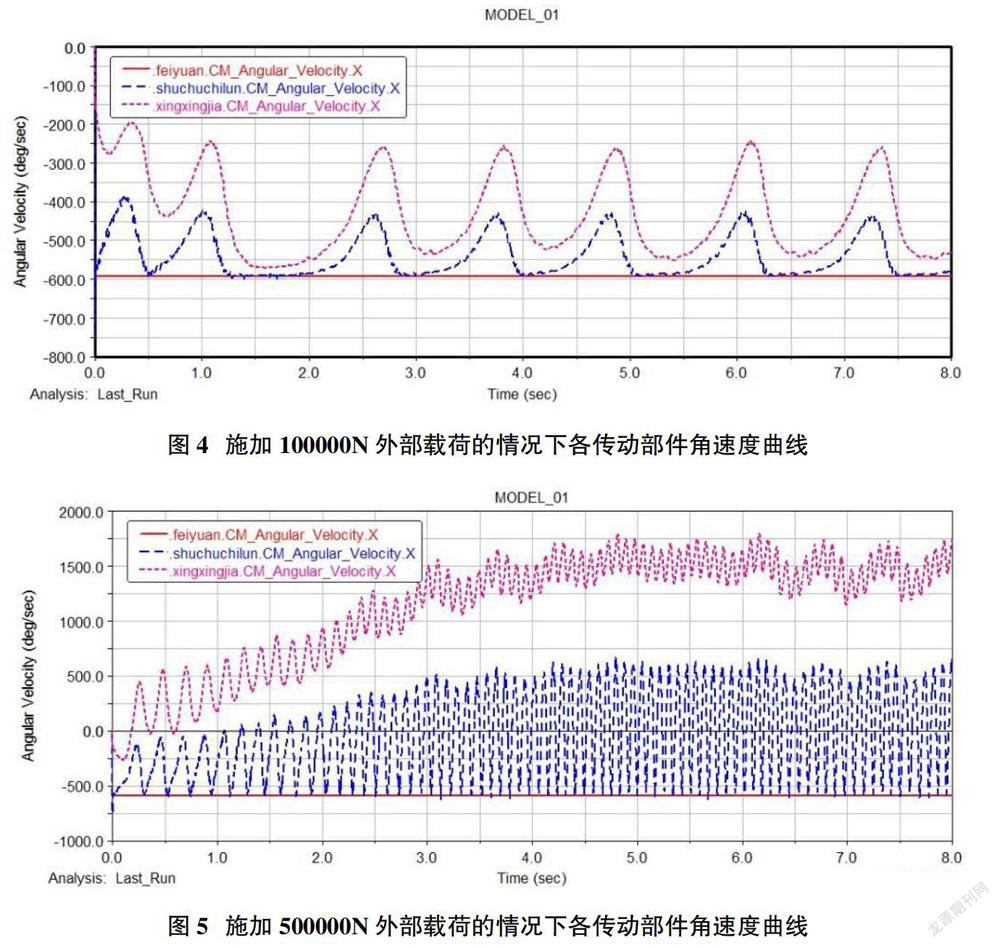
对该传动机构施加外部载荷STEP(time,0,0,0.2,1000000)+STEP(time,0.2,0,20,0),在图4中可见,输出齿轮和行星轮架角速度变化滞后于非圆齿轮,但向同一方向运转。由于非圆齿轮是通过传动比变化来实现无极变速,所以输出齿轮和行星轮架的角速度呈现周期性变化。但是在该机构的实际应用中,由于实际设计情况不同存在诸如弹簧、螺旋轴、螺母等挠度大小不一的挠性体,导致输出齿轮和行星轮架的角速度基本是某一固定值,并且其数值比非圆齿轮角速度小。
2.4 过载保护
对该传动机构施加外部载荷STEP(time,0,0,0.2,500000)+STEP(time,0.2,0,20,0),在图5中可见,输出齿轮的角速度在零附近振荡,即在平衡位置接近处于静止状态,行星轮架的角速度为正,其运动方向与非圆齿轮相反。当外部载荷大于该机构所设定的额定载荷时,输出齿轮停止转动,从而实现了刀具及相关传动部件的过载保护。
3 结论
非圆行星齿轮机构相比于传统变速器结构更紧凑并且大大提升了承载能力,利用ADAMS软件对机构进行建模和仿真,得到了其在自锁、正常工作以及过载保护情况下的几种不同状态,验证其理论功能适用于数控机床传动系统。目前,非圆行星齿轮机构已用于深海石油开采作业等领域,其无级变速和过载保护等优点可在机床主运动及进给运动传动系统中予以应用,进一步提升数控机床性能,丰富数控机床运行状态选择,减少意外发生,大幅提高数控机床精度保持性和使用寿命。
参考文献:
[1]文怀兴,夏田.数控机床系统设计[M].工业装备与信息工程出版中心,2005.
[2]J Bernard. Optimization of Mechanism Timing Using Noncircular Gearing [J]. Mechanical Design and Synthesis. 1992.
[3]刘永平,杨存,孙旋.基于ADAMS的非圆齿轮运动学仿真分析[J].机械传动,2014.
