以静制动 突破运动的圆
2020-09-10许生友
许生友
在平面直角坐標系中,常常会遇到与圆有关的动态题目,解决这类问题需要把圆的有关性质与点的坐标相结合,综合利用直线与坐标轴的交点、圆的性质以及三角形、四边形等有关知识,“以静制动”达到解题目的. 现分类介绍如下.
一、确定最大值
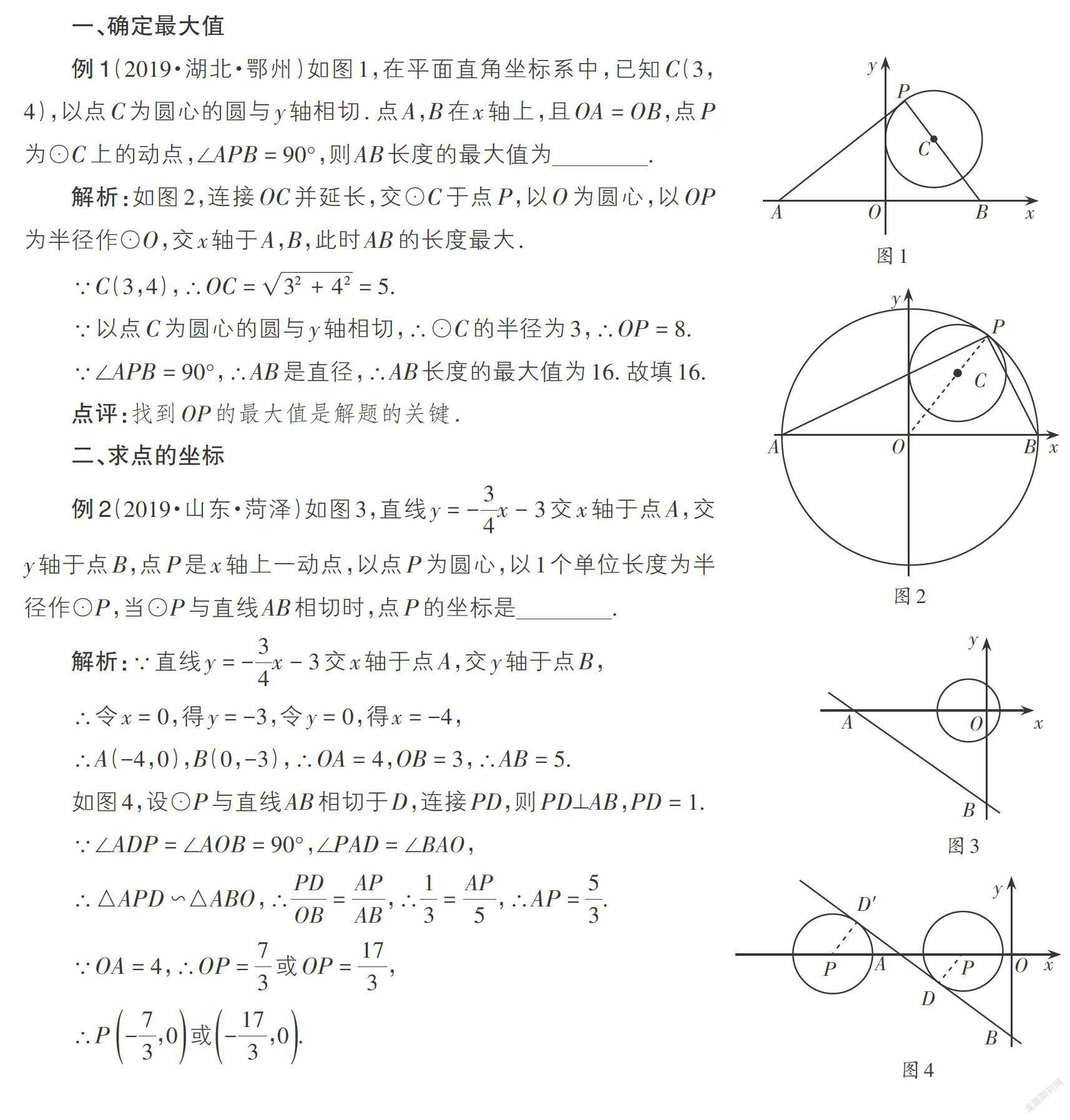
例1(2019·湖北·鄂州)如图1,在平面直角坐标系中,已知C(3,4),以点C为圆心的圆与y轴相切. 点A,B在x轴上,且OA = OB,点P为⊙C上的动点,∠APB = 90°,则AB长度的最大值为 .
解析:如图2,连接OC并延长,交⊙C于点P,以O为圆心,以OP为半径作⊙O,交x轴于A,B,此时AB的长度最大.
∵C(3,4),∴OC = [32+42] = 5.
∵以点C为圆心的圆与y轴相切,∴⊙C的半径为3,∴OP = 8.
∵∠APB = 90°,∴AB是直径,∴AB长度的最大值为16. 故填16.
点评:找到OP的最大值是解题的关键.
二、求点的坐标
例2(2019·山东·菏泽)如图3,直线y = [-34]x - 3交x轴于点A,交y轴于点B,点P是x轴上一动点,以点P为圆心,以1个单位长度为半径作⊙P,当⊙P与直线AB相切时,点P的坐标是 .
解析:∵直线y = [-34]x - 3交x轴于点A,交y轴于点B,
∴令x = 0,得y = -3,令y = 0,得x = -4,
∴A(-4,0),B(0,-3),∴OA = 4,OB = 3,∴AB = 5.
如图4,设⊙P与直线AB相切于D,连接PD,则PD⊥AB,PD = 1.
∵∠ADP = ∠AOB = 90°,∠PAD = ∠BAO,
∴△APD ∽△ABO,∴[PDOB=APAB],∴[13=AP5],∴AP = [53].
∵OA = 4,∴OP = [73]或OP = [173],
∴P [-73 0]或[-173 0].
故填[-73 0]或[-173 0].
点评:本题在求AP的长度时,要注意点P的位置可能在点A的右侧,也可能在点A的左侧,故点P的坐标有两种可能.
三、推理证明
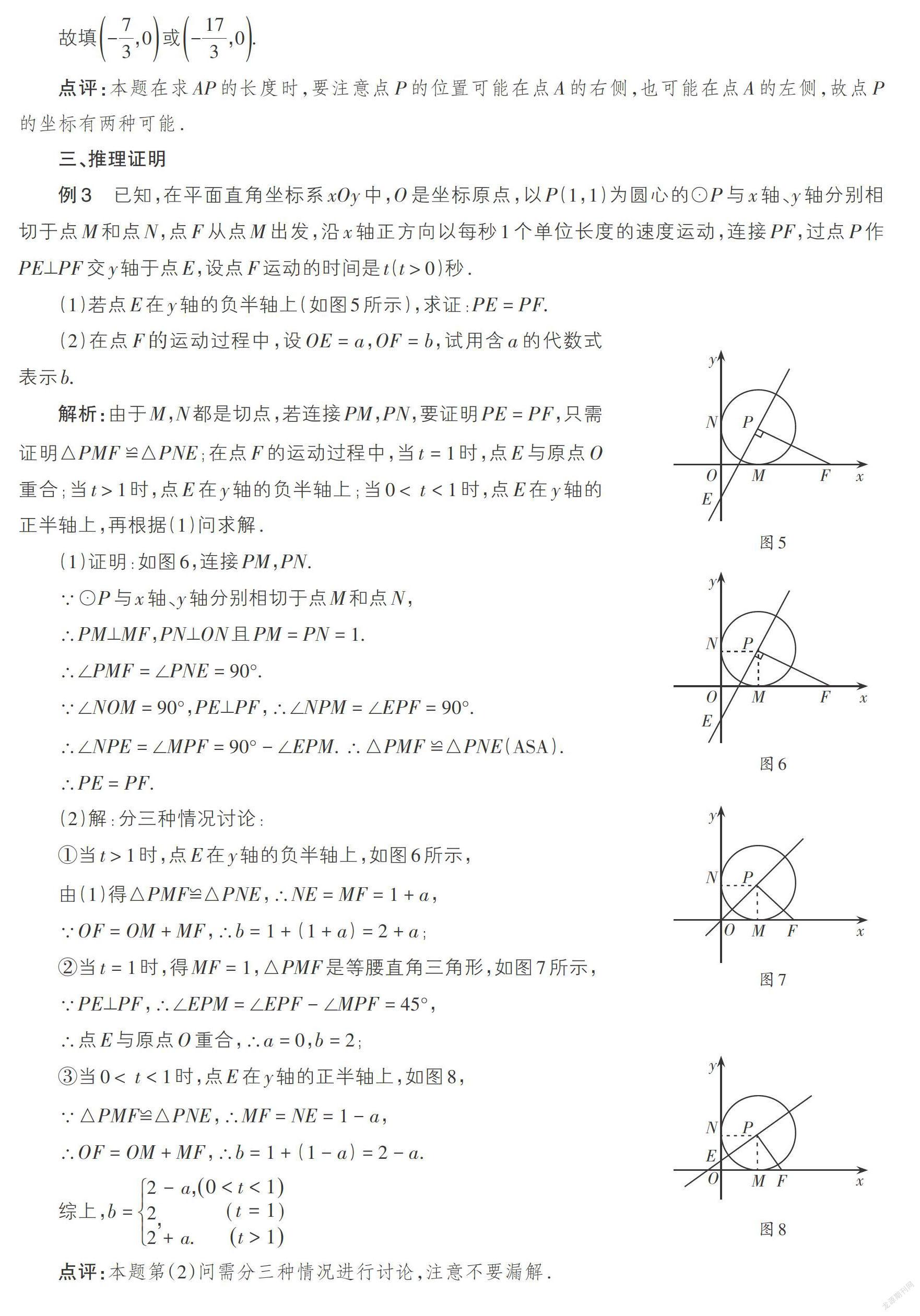
例3 已知,在平面直角坐标系xOy中,O是坐标原点,以P(1,1)为圆心的⊙P与x轴、y轴分别相切于点M和点N,点F从点M出发,沿x轴正方向以每秒1个单位长度的速度运动,连接PF,过点P作PE⊥PF交y轴于点E,设点F运动的时间是t(t>0)秒.
(1)若点E在y轴的负半轴上(如图5所示),求证:PE = PF.
(2)在点F的运动过程中,设OE = a,OF = b,试用含a的代数式表示b.
解析:由于M,N都是切点,若连接PM,PN,要证明PE = PF,只需证明△PMF ≌△PNE;在点F的运动过程中,当t = 1时,点E与原点O重合;当t>1时,点E在y轴的负半轴上;当0< t < 1时,点E在y轴的正半轴上,再根据(1)问求解.
(1)证明:如图6,连接PM,PN.
∵⊙P与x轴、y轴分别相切于点M和点N,
∴PM⊥MF,PN⊥ON且PM = PN = 1.
∴∠PMF = ∠PNE = 90°.
∵∠NOM = 90°,PE⊥PF,∴∠NPM = ∠EPF = 90°.
∴∠NPE = ∠MPF = 90° - ∠EPM. ∴△PMF ≌△PNE(ASA).
∴PE = PF.
(2)解:分三种情况讨论:
①当t>1时,点E在y轴的负半轴上,如图6所示,
由(1)得△PMF≌△PNE,∴NE = MF = 1 + a,
∵OF = OM + MF,∴b = 1 + (1 + a) = 2 + a;
②当t = 1时,得MF = 1,△PMF是等腰直角三角形,如图7所示,
∵PE⊥PF,∴∠EPM = ∠EPF - ∠MPF = 45°,
∴点E与原点O重合,∴a = 0,b = 2;
③当0< t < 1时,点E在y轴的正半轴上,如图8,
∵△PMF≌△PNE,∴MF = NE = 1 - a,
∴OF = OM + MF,∴b = 1 + (1 - a) = 2 - a.
综上,b = [2-a 2 2+a.]
点评:本题第(2)问需分三种情况进行讨论,注意不要漏解.