湖泊水情遥感研究进展
2020-09-09宋春桥詹鹏飞马荣华
宋春桥,詹鹏飞,2,马荣华
(1:中国科学院南京地理与湖泊研究所流域地理学重点实验室,南京 210008)(2:中国科学院大学,北京 100049)
水是人类生存与社会发展均不可缺少的物质基础. 湖泊作为可直接利用的最重要的地表淡水资源,具有调节河川径流、提供农业和生活水源以及改善区域生态环境等功能,不仅对人类生活、国民经济和区域水资源具有非常重要的作用,在维护生态平衡方面也同样具有重要贡献[1]. 中国内陆城镇一半以上的饮用水由湖泊供给[2]. 另外,从生态服务功能方面来看,与其他生态系统相比,与湖泊伴生的湿地生态系统服务价值最高,是支撑人类生存和发展的重要系统[3],并与湖泊生态系统共同在维持生态平衡、调节区域气候和河川径流、补充地下水、防洪、保护生物多样性、减轻流域洪旱灾害等方面发挥重要作用[4].
此外,湖泊作为自然综合体,由湖盆、湖水、水中所含物质(矿物质、溶解质、有机质以及水生生物等)所组成,与自然界的物质和能量循环密切相关. 湖泊不仅是水资源和多种沉积矿藏贮存的场所[5],同时也参与到各大圈层的相互作用之中,它的形成与消失、扩张与收缩及其引起的生态环境的演化过程都是全球、区域和局部的构造和气候事件共同作用的结果[6]. 因此,湖泊作为全球环境变化的敏感对象,是湖区气候变化、环境变异的指示器,尤其是位于偏远地区的内陆湖泊受到人类干扰较小,可以准确地反映气候、环境系统的变化[7].
21世纪以来,由于气候变化、人类活动等因素的影响,中国多数湖泊发生了不同程度的变化. 例如,气温变暖[8]和地下水的过渡开发[9],导致了中国北方地区湖泊数量减少、面积萎缩;而在降雨量增加、冰川融化的共同作用下,新世纪以来青藏高原地区湖泊快速扩张,同时造成草场淹没、公路损坏等危害[10-12]. 因此,有必要对湖泊变化进行实时、持续监测. 一般来说,湖泊变化以直接的水文观测为主,可以直接测量水位和岸线. 这种传统方法虽然精度较高,但耗时耗力,且时效性有限,难以准确表达区域性湖泊的实时变化. 此外,受到经济和政治因素的影响,近年来全球水文监测站点数量有所减少. 对于一些海拔较高、地理状况复杂且恶劣的地区,甚至无法进行实地测量,也就造成了部分地区历史水文观测资料匮乏. 另一方面,不同地区水文监测站点获取的监测数据格式差异较大,在进行湖泊观测数据整合时存在不便,难以满足当前全球变化研究对区域乃至全球水文监测数据的需要[13]. 在这种情况下,遥感因其空间覆盖广、周期性观测、人力成本低等优势,为监测湖泊变化提供了难得的契机. 尤其是近年来,社会经济发展以及城市化进程的加快,用水矛盾越来越突出,水文学研究需要解决的问题越来越复杂. 遥感技术在水文学中的广泛应用,极大地推动了水文学的研究发展,湖泊水情遥感也就应运而生.
但是,由于陆表水体变化过程的复杂性以及遥感技术自身的局限性,陆地水体的长期动态监测仍然受到一定程度的制约. 例如,在湖泊水情监测方面,受到传感器时空谱分辨率的限制,能够用于精细化全天候动态监测的传感器或者传感器组合不多;又因为不同地区下垫面复杂程度不一,目前还没有统一的普适性水体提取算法. 因此,人们正在积极发展新的技术手段和方法. 除了发展新型卫星传感器,近年来建设的地球大数据云平台,能够方便、快速地获取不同数据集,同时进行高效处理. 遥感技术的不断发展、成熟和完善,将不断提升我们对陆地水体及其变化过程的理解,从而让人们更及时地适应不断变化的地球环境[14].
湖泊水情要素是描述湖泊水文信息的主要物理量,也是能够准确反映某一时间湖泊水文变化规律的最直接的指标[15],包括水域范围、水位、水量等. 湖泊水情遥感是指以电磁波与湖泊水体相互作用的机理为基础,以湖泊水文要素为主要研究对象的一门综合性交叉学科. 本文基于国内外湖泊水情遥感监测技术与方法的发展,总结该领域近年来提出的新方法和新技术. 同时,结合当前遥感技术和数据处理方法的发展,简要论述当前遥感在湖泊动态变化监测中存在的问题和未来的发展方向.
1 湖泊水情遥感的概念及由来
从1960s开始,各种水文要素的参数反演及应用研究已经从多方面展开[16-19]. 21世纪以来,各类专著的出版以及研究的开展,标志着水文遥感逐步取得整体性和系统性发展,在理论、方法、技术和数据产品上也得以不断完善[20]. 在这样一个发展背景之下,分布式流域水文模型对空间信息需求的不断增强,以及全球气候变化和人类活动所带来的全球灾害事件,促进了学科交叉融合,水文遥感的加入进一步推动了水文学、生态水文学等学科的发展. 由于水体的流域循环特征,并且随着涉水问题影响面的扩大和水科学研究的不断深入,研究的重点逐渐转向以流域为单元的水文过程研究,以流域为研究对象的水文过程监测研究开始逐渐形成.
事实上,作为全球陆地的组成部分,流域一直是水文遥感的核心研究对象之一. 流域水文过程遥感也就成为一个新的发展方向,它既是水文遥感的应用对象出口,又具有特殊性[20]. 其中,流域水文过程中各个环节的变化都会最终作用于湖泊、河流水量动态平衡过程,对于流域水文遥感的研究现状及存在的主要问题,刘元波等[20]、Tang等[21]综述文献已做了全面深入的阐述. 从广义角度看,湖泊水情遥感包括影响湖泊水量平衡的流域各水文过程及其要素的遥感监测.
流域水文过程涉及面较广,涵盖过程较为复杂(图1). 相对地表径流、蒸散发以及大气降水等水循环过程而言,湖泊面积、水位以及水量变化能够直接指示湖泊水文情势的动态变化,并且更适合利用遥感技术进行监测. 因此,从狭义角度看,湖泊水情遥感是指基于多源、多维度遥感对湖泊的面积、水位(水深)以及水量变化开展的定量/定性监测. 本文重点针对狭义的湖泊水情要素面积、水位以及水量变化的遥感监测技术和方法进行综述.

图1 流域水循环过程及湖泊水情变量遥感监测概念图Fig.1 Conceptual illustration of watershed-scale water cycle and lake water regime monitoring based on remote sensing
2 湖泊水情遥感的卫星传感
2.1 用于湖泊面积提取的常用遥感卫星
湖泊水域面积监测为湖泊水情研究奠定了基础,它的动态变化为研究全球气候变化乃至全球环境变化提供了重要依据. 卫星遥感技术的发展,为大尺度、实时、动态监测湖泊面积变化提供了可能性. 尤其是近年来中高分辨率遥感卫星的发展更是为大尺度的湖泊面积精细化监测提供了多种数据源. 目前常用的数据源有SPOT HRV-CCD、EOS MODIS、Landsat MSS/TM/ETM+/OLI、CBERS CCD、Sentinel OLCI等光学遥感影像,以及ERS-1、ERS-2、Envisat、Sentinel-1等微波雷达影像.
光学遥感影像包含大量易于提取的光谱信息,且由于数据可用性较高以及合适的时空分辨率,光学传感器已在水体变化监测领域得到了广泛应用[22]. 自1972年发射第一颗地球资源技术卫星Landsat-1以来,基于卫星的光学传感器已经证明了其监测地球表面大规模陆地覆被变化的潜力[23]. 作为重要的土地覆盖变化现象,地表水文学一直是地球观测的重要课题. 早在1984年,就有了关于遥感技术在印度水文学和水资源管理中应用的描述[24];之后,又有了许多利用卫星遥感数据得出河流淹没面积、水位和流量的研究[25];随着技术的发展,又有学者对测量地表水的遥感方法进行了更为详尽的总结和分析[26].
在地表水的遥感监测研究中,光学传感器的空间分辨率是要考虑的主要因素之一. 粗分辨率遥感器精度较低,但通常具有高时间分辨率和广阔的覆盖范围. 例如搭载在NOAA卫星上的AVHRR传感器,最初用于海洋和大气层的监测研究,但后来发现在探测大规模洪水事件时十分有效[27]. Terra和Aqua卫星上的MODIS传感器空间分辨率较粗,但重复周期短、覆盖范围广. 自2000年卫星发射以来,已经积累了多年的数据记录,非常适合对地表水体进行时空分析. 因此,MODIS时间序列数据已被广泛应用于监测湖泊水体的变化[28-30]和洪泛区淹没研究[31-32].
相对于上述中低空间分辨率卫星遥感数据源,作为中高分辨率光学卫星,Landsat是历史上最成功的卫星系列之一,自1972年第一代卫星发射,该系列卫星已经连续提供了近50年的对地观测数据. 传感器由最早的MSS升级到目前最新的OLI,空间分辨率也从80 m提高到30 m,此级别的分辨率非常适合精细监测大尺度地表水的长期变化[33-35]. SPOT是另一个中高分辨率卫星系列,装载了分辨率约为10 m的传感器,这比Landsat影像的分辨率更高. 无法免费获取数据在一定程度上限制了它的应用,但仍然有相当多的研究已经使用了SPOT影像[36-37]. 同类型的Sentinel-2由两颗卫星组成,搭载的MSI传感器能够提供空间分辨率为10~60 m的高质量多光谱影像. 其他中高分辨率的传感器,例如HJ-1A/B[38]等,也已被证明可以有效地探测地表水体.
提高传感器的空间分辨率一直是遥感研究的主要目标,并且在过去十年中取得了重大进展. 许多新传感器,例如IKONOS、Worldview、ZY-3、Quickbird和GF-1/2能够提供米级甚至亚米级空间分辨率的影像. 在此分辨率级别上,可以成功检测到小型水体. 但是,高空间分辨率传感器同样存在一些局限:一是它们的场景覆盖小,不适合绘制大区域地表水;另一个是图像上存在阴影,特别是在城市地区或山区[39],这会严重影响水体的识别. 此外,高分数据获取方式一般都是收费的,这使得它在科学研究中的应用受到了限制. 因此,考虑要监测的水体规模,选择具有适当分辨率的遥感数据至关重要.
此外,由于光学遥感传感器容易受到夜晚和云雨天气的影响,高质量的遥感影像获取较难,在一定程度上限制了水体信息的获取. 相对而言,微波传感器具有穿透云层和某些植被的能力,并且不受太阳辐射的影响,可以在任何天气条件下昼夜工作. 随着微波遥感技术的发展,合成孔径雷达(Synthetic Aperture Radar,SAR)数据的使用也越来越频繁[40]. Schumann和Moller[41]对洪水监测的可用微波遥感进行了详细综述,发现SAR是最适合监测洪水泛滥的微波传感器.
在实际研究中,为了充分发挥不同数据源的优势和特点,需要根据研究目标区域的特点和研究尺度等因素进行筛选,这样可以在提高时间和空间分辨的同时对比分析结果,提高识别精度. 图2和表1列出了包括以上综述的广泛用于湖泊水域范围监测的卫星/传感器发展历程和关键参数.

图2 水域范围提取常用光学遥感卫星/传感器的发展Fig.2 Development of optical satellites/sensors for water extraction

表1 水域范围提取常用光学遥感卫星及相关信息
2.2 湖泊水位监测遥感
卫星测高的概念最早是在1969年召开的固体地球和海洋物理大会上由美国著名大地测量学家Kaula W.M.提出的. 自从1973年第一颗星载主动微波遥感航天器Skylab发射以来,卫星测高技术得到不断发展,之后各种不同的雷达/激光高度计被先后搭载在Geosat、ERS-1、TOPEX/Poseiden、ERS-2、GFO、Jason-1、Jason-2、Envisat、ICESat、Cryosat-2、SARAL、Jason-3、Sentinel-3、ICESat-2等测高卫星上. 世界上主要测高卫星及其基本参数如图3和表2所示.
早在1982年,Brooks[42]就已经借助Seasat测高卫星获得湖泊水位观测数据并用到绘图工作中. Birkett等[43-44]先后利用Geosat、T/P等测高数据对全球不同湖泊水位变化进行监测,并对其精度做出评估. 随着ERS-1和ERS-2卫星相继发射,Ducet等[45]将T/P和ERS-1、ERS-2数据结合起来,绘制了高分辨率的全球大洋环流图. 随着科技水平的提高,可用的测高卫星逐步增多,作为T/P卫星的后继卫星,Jason-1、Jason-2以及Jason-3分别于2001、2008和2016年成功发射,延续对全球海洋表面进行监测的任务. 已有研究对三者进行组合从而构成长时序水位变化分析,并对系统偏差做出评估并校正[46]. 欧洲航天局(ESA)在2002年发射了Envisat卫星,相对上一代卫星ERS-1和ERS-2,Envisat卫星搭载了新一代雷达高度计(Radar Altimeter-2,RA-2),测高精度也提高到了厘米级[47]. ESA在2010年发射的雷达测高卫星CryoSat-2搭载了先进的Ku波段SIRAL高度计,能够准确测量南北极的海冰厚度以及冰盖的变化. 上述这几颗卫星的分辨率都相对较低,只适用于面积较大的湖泊. 2016年发射的Sentinel-3A和2018年发射的Sentinel-3B上的高度计设计为在Ku频段上以SAR模式运行. SAR模式将提高高度计接收水体反射信号的能力,对于小型水体而言,这尤其重要. Gao等[48]评估了Sentinel-3内陆水体水位产品的精度,证明了其在监测中小型水体时受到的陆面干扰很小.
除了这些雷达高度计,美国国家航空航天局(NASA)在2003年发射了激光测高卫星ICESat,搭载了地球科学激光测高系统GLAS(Geoscience Laser Altimeter System),其星下点足迹(footprint)可以达到70 m,比起早期的卫星测高数据,精度得到了很大的提高,广泛用于内陆湖泊水位变化的研究. 例如,Zhang等[49]、Phan等[50]、Song等[11]利用ICESat数据监测了青藏高原湖泊在2003-2009年期间的水位和水量变化速率. 作为ICESat卫星的后继卫星,2018年发射的ICESat-2继续执行对全球冰盖、冰川、海冰等的监测任务. 相比而言,ICESat-2能够覆盖数量更多的湖泊,测高精度也有所提高. Zhang等[51]结合前序卫星ICESat对其进行了比较,验证了其精度的可靠性.
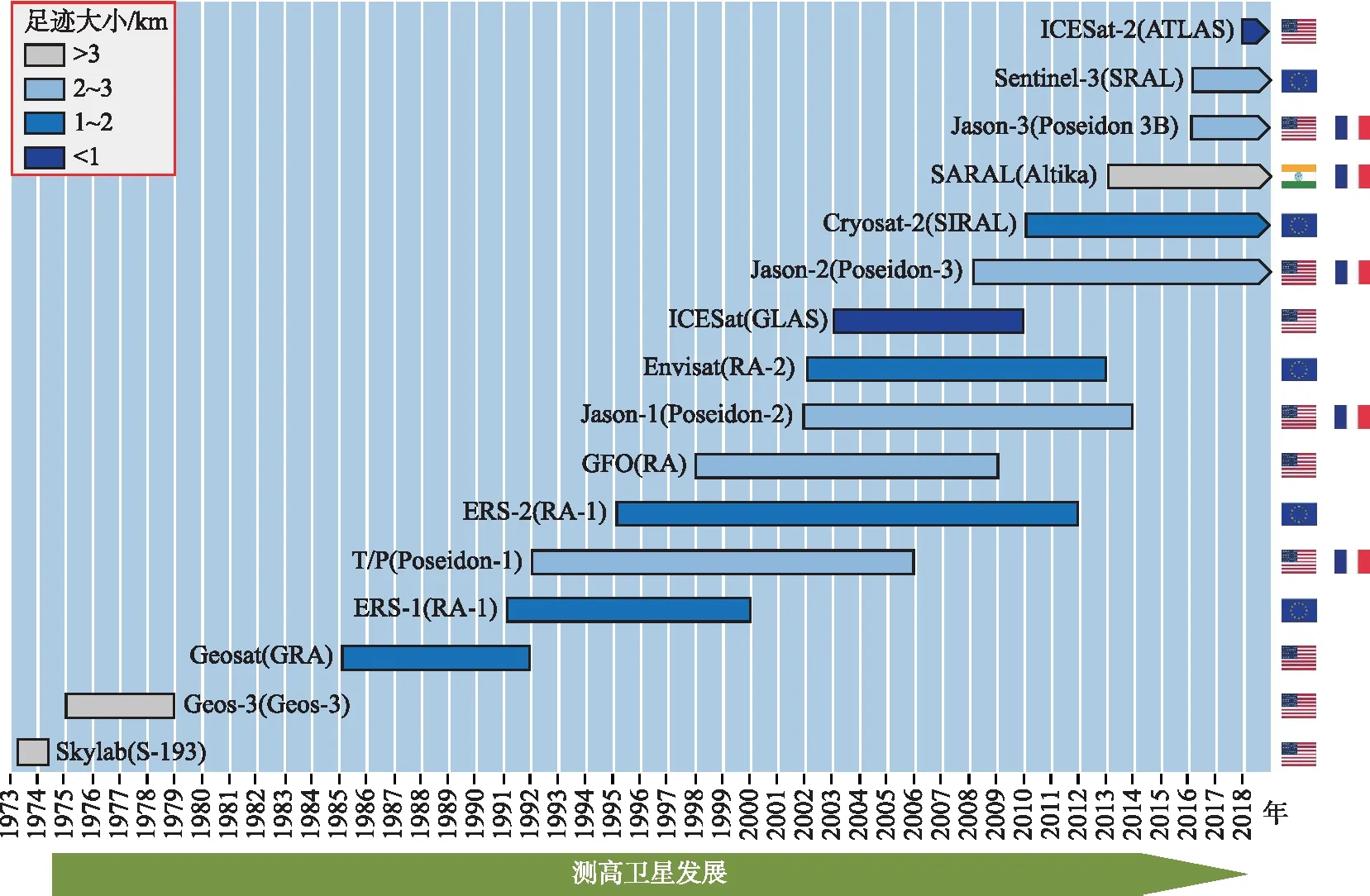
图3 水位提取测高卫星/传感器的发展Fig.3 Development of altimetry satellites/sensors for water level extraction
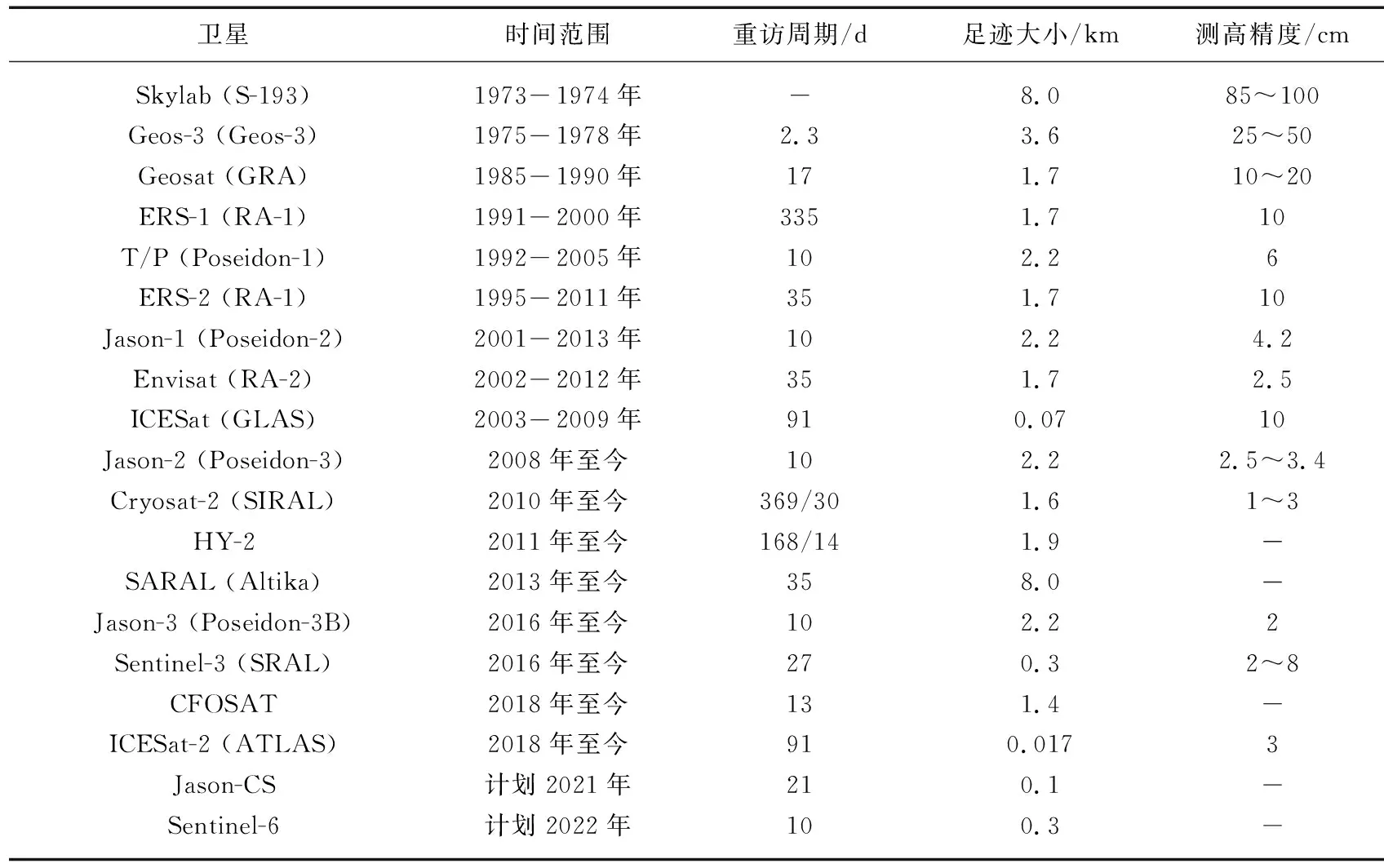
表2 测高卫星及相关信息
3 湖泊水情要素遥感
3.1 湖泊水域范围遥感
传统的水体提取方法一般依靠人工判读、目视检测,这不仅费时、费力,还会引入目视解译人员的经验知识从而存在不可控的主观误差,并不适用于面积较大、周边地理状况复杂的水体. 随着计算机科学技术的发展,借助计算机识别技术实现水体信息自动化提取的研究已经陆续开展. 现阶段,计算机自动化识别方法主要包括:单波段阈值法、多波段运算法(谱间关系法、比值法、水体指数法等)、色度判别法、决策树分类以及机器学习算法等.
单波段阈值法原理简单,操作简便. 单波段阈值法通常涉及从多光谱图像中选择一个波段提取开放水体信息,然后确定该波段以区分水和陆地的阈值,这主要依据水体在近红外波段和短波红外波段具有强吸收的特点. 该方法是最早用于水体提取的,早在1957年,就有人将单波段阈值法用到了海洋研究中[52]. 之后直到1992年,基于单波段阈值法发现并改进了用于区分较小水体的红外单波段阈值法[53]. 然而,阈值的主观选择可能导致开放水域的过度估计或估计不足,并且提取的水信息通常与阴影噪声混合. 相对而言,多波段方法使用两个或多个多光谱波段进行组合运算,从而突出了图像中的水体信息. 早在1998年,就有针对山区水体的多波段方法被提出并成功剔除了阴影的影响[54]. 虽然多波段组合运算相对单波段阈值法有效削弱了非水体信息的干扰,但波段选取和阈值确定的工作比较繁琐,且不能移除非水体的混合信息. 除了单波段及多波段阈值方法之外,水体指数法也是较为常用的一种水体提取方法. 水体指数法采用了归一化比值运算,因此能够自动消除地形起伏的影响,并通过突出水体、抑制其他地物信息来进行有效区分. 例如在1996年提出的归一化水体指数(Normalized Difference Water Index,NDWI)能够突出影像中的水体信息并减弱植被和土壤信息,从而做到水体的快速识别[55]. 之后基于NDWI,提出用中红外波段代替近红外波段,发展改进型归一化水体指数(Modified Normalized Difference Water Index,MNDWI),解决了提取水体的面积包含有城镇建筑用地而偏大的问题[56],还解决了阴影难以消除的难题. 在部分研究中,还可以通过调整阈值大小[57]以及组合多种水体指数[58],从而达到更好的提取效果. 另外,在不同计算过程中分阶段地融合不同层次知识并建立迭代算法,能够实现水体的自动化、高精度提取[59]. 除此之外,人工智能神经网络能够对海量、复杂的数据集进行快速、准确地处理,可以很好地将遥感影像的多光谱信息和纹理特征结合起来,从而实现图像的精确分类[60-61]. 数学形态学方法[62]、混合像元分解法[63]等在用于水体信息提取时,也取得了较好的识别效果.
由于SAR的成像机制较为复杂,许多学者为提高水体识别的准确性,分别从不同角度分析并提出了有效的数据处理方法[64]. 基于SAR数据的水体信息提取方法也从传统的方法发展为多波段、多极化方式和多个入射角的SAR图像综合分类法. 近年来,基于计算机科学的遥感图像识别技术发展迅速,结合光学影像数据和SAR数据的研究也开始增多,充分利用了光学影像光谱信息丰富、SAR数据不受天气影响的特点,从而实现了更加精确的水体信息提取[65]. 不同水体提取方法优缺点比较见表3.

表3 主要水体提取方法

续表3
3.2 湖泊水位遥感
湖泊水位变化是评价湖泊水量平衡的重要指标. 一般来说,湖泊水位变化以直接的气象和水文观测为主,能直接测量水位和湖岸. 但这种方法并不适用于地处偏远、自然条件恶劣地区的湖泊. 卫星测高技术因其空间覆盖面广、全天时全天候重复工作、经济与人力成本相对较低等优势,为监测湖泊水位变化提供了难得的契机. 卫星测高最早用于海面测量,但后续研究发现,大型湖泊表面和海洋表面具有类似的反射特性,湖泊测高水位垂直精度较高,与海洋表面测高精度近似[72]. 由于卫星测高可以从宇宙空间大范围全天候多次重复、准确地提供海洋、冰面、陆地冰川、湖泊、河流等表面高度的观测值,具有其他监测手段无法比拟的优势[73],并且卫星测高数据处理技术更加成熟,测高精度也在不断提高,使得对于湖泊水位的研究开始增加.
自1990s中期以来,卫星雷达测高就被用于监测诸如湖泊和河流等内陆地表水的水位变化[26,74-75]. 在地面参照系内测量地表水位,其重复性从10到35天不等,具体取决于卫星的轨道周期. 尽管数据获取与天气条件无关,但是湖岸地形可能会影响卫星高度计的信号,从而导致湖泊水位误差较大. 最初发射的测高卫星搭载的都是雷达传感器,星下点足迹都在2 km左右,受湖岸地形的影响较大,更适用于监测大型湖泊的水位动态变化. 针对雷达测高卫星轨道间距远、星下点足迹大的不足,NASA在2003年发射了激光测高卫星ICESat(the Ice, Clouds, and Land Elevation Satellite),搭载了地球科学激光测高系统(Geoscience Laser Altimeter System,GLAS),空间分辨率较高,其星下点足迹可以达到70 m,垂直精度可以达到3 cm,能够对面积较小的湖泊进行水位变化监测. 作为ICESat卫星的后继卫星,2018年发射的ICESat-2继续执行对全球冰盖、冰川、海冰等的监测任务,能够覆盖数量更多的湖泊,测高精度也有所提高.
但单个测高卫星存在覆盖湖泊数量少、服役年限短的不足,因此,在许多情况下,需要融合多种测高卫星数据,从而发挥各种卫星数据的优势,获取数量更多、更完整的湖泊水位多年变化信息. 例如刘英等[76]基于Hydroweb(Hydrology website)湖泊水位长时序变化数据,对青藏高原63个典型湖泊的多年水位变化进行了分析. 除了使用卫星测高监测湖泊水位之外,现有研究中,也有学者通过GIS建模的方法获取湖泊不同位置的水深. 例如,Hollister等[77]利用最大深度测量值和湖泊岸线,通过简单的线性变换可以估计任意点处的湖泊深度. 还有一些学者通过结合光学卫星影像和地形数据计算得到影像获取时间的湖泊平均水位[78-79]. 该方法的精度主要受到地形数据精度、遥感影像分辨率以及湖泊周围地势的影响.
3.3 湖泊水量平衡遥感建模
传统湖泊水量估算方法一般需要借助水文站实地测量获取的地表径流、湖面蒸散发等参数,但偏远地区的湖泊资料获取较难实现[80]. 随着遥感技术的发展,许多研究通过结合卫星测高数据和卫星影像数据获取的湖泊水位和面积,估算出湖泊的水量变化,为解决这一困难提供了可靠的办法.
根据卫星测高数据和遥感影像数据的选择,通常有3种方法可以提取湖泊水量. 第1种方法利用测高水位数据或者湖泊面积数据与实测湖泊水量数据建立数学模型,就可以通过遥感数据计算得到没有观测时期的湖泊水量. 尽管这是一种简单明了的方法,但它仅适用于可直接或间接获取实际水量信息的湖泊. 第2种方法是利用同时段的测高数据和影像数据,结合水量估算公式,从而估算湖泊的水量变化[81-82]. 但是这种方法的局限性在于,只有在测高水位和湖泊面积数据监测时间一致的情况才能用于估算湖泊水量变化. 第3种方法则是建立测高水位和湖泊面积统计模型,进而通过一类遥感数据(卫星测高水位数据或者遥感影像数据)得到湖泊长时序的水量变化. 例如,在Crétaux等[83]的研究中,通过多源遥感数据获取的湖泊面积扩展了CNES测高数据的时段,从而获取目标湖泊/水库的水量变化.
除了利用测高卫星得到的水位变化,同样可以结合光学影像得到湖泊面积变化和DEM数据,计算水量变化. 受湖盆地形影响,某一湖泊面积与相应的水面高程(水位)对应,并在不同形态的湖盆中具有不同的关系. 通过这种关系可以计算湖泊面积变化与水量变化之间的关系[84].
此外,由美国宇航中心和德国航天中心联合研发的GRACE(Gravity Recovery And Climate Experiment)重力卫星,不会受到复杂地形的限制,能够进行连续多次的重复观测. 十余年来,国内外学者针对GRACE重力卫星的数据处理方法、产品精度以及在各个科研领域的应用等方面开展了诸多的研究工作[85-87]. 作为GRACE的后继卫星,2018年5月发射的GRACE-FO能够延续之前的对地观测. 研究发现由于空间分辨率较粗,GRACE卫星仅适合大尺度范围的陆地水量变化监测. 尽管基于GRACE数据的陆地水量研究中存在一定的误差,但在用于验证其他方法获取的水量估算结果的研究中取得了不错的效果[11,88].
4 湖泊水情遥感监测数据集成处理
地球大数据时代的主要特点在于数据获取速度快、更新周期短、时效性强[89],且数据量呈现出指数级增长的态势,这对数据存储、处理和分析的要求都很高,一般的本地计算机或服务器已经不能满足海量数据的计算需求. 自21世纪以来,基于云平台的海量数据并行计算得到快速发展,例如,由Google与卡内基美隆大学、美国地质调查局共同开发的免费地理计算云平台-谷歌地球引擎(Google Earth Engine, GEE). GEE平台建立在谷歌数据中心的一系列数据支持之上,有着强大的数据存储、处理、分析和可视化能力. 此外,该平台还整合了各类遥感影像数据、地球物理数据、气候/天气数据和人口统计数据等. GEE高效快速的计算能力以及镶嵌其中的各种地理空间数据和分类算法为全球或区域尺度的科学研究创造了极大的便利.
近年来,高性能云计算平台已被广泛应用于社会与科学研究. 基于GEE平台,Pekel等[35]结合1984-2015年全球300多万景Landsat影像,生成了30 m空间分辨率的全球地表水体分布年度和月度数据集,最近又将数据集更新到2019年. 如果通过一台本地计算机完成此项计算任务的运算时间超过1200年,而基于GEE平台,完成此项工作仅耗时45天,可见云计算平台在提高数据处理效率上的能力十分强大.
5 研究现状及展望
卫星遥感作为一种先进的湖泊变化监测技术手段,可以实时监测当前的动态变化,掌握现有情况;也可以对历史观测资料进行分析,探究变化规律;同时还可以结合水文、水动力模型,对未来变化趋势进行预测[90]. 尤其是近年来中高分辨率遥感卫星的发展更是为多尺度的湖泊变化监测提供了多种数据源,针对全球湖泊水情监测的研究开始从多方面开展,这些研究极大地促进了对于全球湖泊在过去近半个世纪变化规律的掌握和理解,取得了显著的研究进展.
随着水文遥感的不断发展,各种水体监测产品不断出现,提供了海量的空间数据,为进行湖泊水情实时动态监测以及变化规律分析奠定了重要的数据基础. 但是水文遥感作为一门新的学科,也面临着诸多问题,包括遥感反演算法普适性、多源遥感数据之间的差异性、长时序遥感趋势反演的可靠性等. 例如,通过对湖泊水情遥感研究进展进行回顾与综合,能够发现湖泊水域范围提取从早期单一、非连续数据向多源、多传感器遥感数据的综合使用转变,提取方法也由最初费时费力的目视判读发展为现在计算速度快、识别精度高的计算机自动化识别. 但这些提取方法仍会受到混合像元、阴影以及光谱特征相似地物的影响,针对这些问题,用于提取的指数模型和算法也在逐步优化和发展. 国内外学者通过结合多种方法进行综合研究,以减少阴影的影响,并针对混合像元问题发展了多种混合像元分解模型,但目前并没有效果最佳的普适算法. 综上所述,湖泊面积变化研究一般集中在两个方面:一是水体信息提取普适方法研究,二是湖泊变化的趋势以及成因分析. 因此不断探索湖泊信息提取的新方法以及如何定量分析湖泊动态变化是十分重要的研究主题.
另外,湖泊水位提取发展类似,过去许多研究大多利用1~2种测高数据进行部分卫星轨道经过的湖泊的分析,受限于测高卫星轨道间距大、服役年限短,这就导致很难覆盖到大范围多数湖泊,并且能够得到的水位数据也仅限于卫星服役年限而无法构建长时序的湖泊历史水位资料. 但随着测高技术的发展,数据处理算法的成熟,可用的测高数据越来越多且精度得到提高,开发多源测高数据集成算法并优化成为今后湖泊水位提取的重点. 因此如何采用综合集成的方法和大数据、系列数据的优势,提高湖泊水文要素提取的精度和效率是未来研究的方向.
在当前湖泊水情遥感研究的基础上,要推动湖泊水情遥感更进一步,未来的研究及发展重点可以归纳为以下两点:
1)基于多源遥感云计算平台的湖泊水情数据批处理:在地球大数据时代,高性能云计算平台的发展为海量遥感数据存储、计算及可视化展示提供了技术支持与平台支撑. 近年来国内云计算平台也得到了快速发展,如阿里云等. 然而,目前国内云计算平台在地球科学领域的应用还较少. 因此,未来应该多考虑基于国内外云计算平台开展全球或区域尺度的地表水体连续变化研究.
2)集成站点与遥感观测发展湖泊关键要素全国乃至全球尺度产品:利用众源卫星光学与雷达遥感影像,发展耦合分步迭代与机器学习思想的水体自动化分类算法,实现大尺度长时序湖泊水域范围提取技术;引入合适的滤波算法,同化站点观测、多源雷达与激光测高卫星数据重建长时序湖泊水位,在此基础上研发“天(卫星)-空(无人机航测)-地(台站)-水(无人船载测深)”湖泊水情监测技术方案,实现湖泊水位与水量变化的历史长时序重建与近实时监测. 并将上述技术体系移植到GEE等遥感云平台,研发全国或全球尺度湖泊水情的业务化产品.
