基于Process Simulation的机器人装配工位的应用研究
2020-09-08于斌张佳俊柳跃雷黄涛陈成
于斌, 张佳俊, 柳跃雷, 黄涛, 陈成
(重庆长安汽车股份有限公司制造中心,重庆401133)
0 引 言
随着智能化与信息化的到来,越来越多的机器人被投入到汽车装配领域,因此在生产线设计阶段就需要对机器人的运动进行仿真分析。
Process Simulation集成了真实机器人的仿真技术,它可以在虚拟的装配环境中对不同类型的机器人进行仿真,因此在设计阶段就可以对机器人的运动路径、布局和生产节拍进行规划[1],从而达到减少实际生产线机器人装配工位的调试时间和成本的目的。
1 仿真数据的准备与打开
打开Process Designer,在个人工作文件夹中新建Studyfloder节点,在该节点创建RobcadStudy节点,并按照工位号和名称重命名。将需要进行验证的东西(资源树、操作树、产品、焊点等),手动拖入RobcadStudy中(如图1),完成仿真前的数据准备[1-3]。
在Process Designer中,选择对应需要进行仿真验证的RobcadStudy文件夹并右击Open with Process Simulate in Standard Mode命令,运行Process Simulate并加载RobcadStudy中的仿真数据,这样就进入了Process Simulation的仿真环境中。

图1 仿真文件夹
2 机器人装配工位仿真
2.1 夹具的定义与安装
当装配工位布局完成并进入Process Simulation中后,首先要对机器人的夹具进行机构的动作定义[4],此时需要将夹具激活。如图2所示,选中拧紧机构,并点击【Modeling】、【Set Modeling Scope】,此时拧紧机构的资源节点变成红色的M,代表数据处于可编辑状态。
接下来,对夹具进行动作的定义,在Kinematics Editor 界面中(如图3),选中黄色的零部件定义为变位机构,绿色的零部件为滑轨底座,将二者连接起来并定义它们之间的运动关系(如图4),在关节属性界面可以定义运动关系、方式、行程、速度、加速度等参数,此时仿真中的夹具与实际生产过程中夹具的动作保持一致,保证了仿真结果的真实性和可靠性[5]。

图2 夹具激活及其状态显示
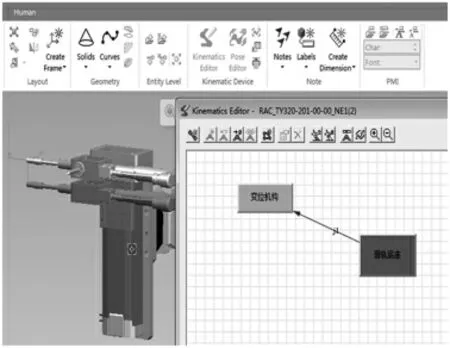
图3 夹具机构定义

图4 夹具机构运动关系
对机器人夹具进行类型的定义,例如Gripper、Gun、Servo Gun等类型,并设置TCP坐标和基础坐标(如图5),此夹具定义为Gripper,将TCP1定义为机器人和夹具运动的TCP坐标。
设置完成后,将夹具安装于机器人上(如图6),选择机器人和与之对应的夹具,选择机器人的安装坐标和机器人夹具的安装坐标,二者相互配合,将夹具安装到机器人上。

图5 夹具类型定义及坐标设置

图6 机器人夹具安装
2.2 机器人路径规划
2.2.1 机器人移动及路径选择
机器人和夹具的移动都是以机器人TCP坐标为基准点,选中机器人,并点击【Robot】、【Robot Jog】,可以进入Robot Jog界面(如图7),可以直接拖动图中的坐标进行机器人的大方向移动,也可以在此界面上的Translate和Rotate上进行机器人位置的微调,通过以上2种方式就可以对机器人的路径进行规划。
如图8所示,机器人路径坐标的选取有两种方式:1)添加当前坐标(Add Current Location)。
此方法适用于将机器人拖动到一个合适的位置并添加当前坐标。2)添加已有位置(Add Location By Pick)。此方法适用于已知机器人具体路径位置的情况。
通过机器人的移动及路径坐标点的选择[6-7],机器人的工作路径就已经初步规划完毕,如图9所示。

图7 机器人移动方式
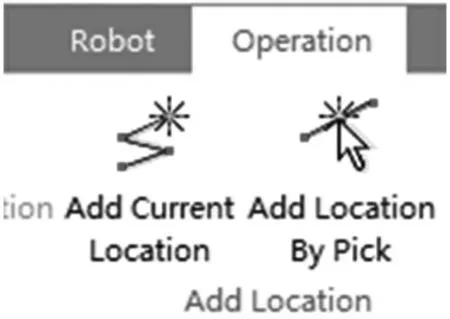
图8 路径坐标选择

图9 机器人路径坐标
路径初步规划完成后,利用干涉检查工具确定机器人、工位设备、工装及零部件之间是否存在干涉。如图10所示,选择要进行干涉检查的项目(工位的防护围栏和机器人夹具),若存在干涉,则需要对机器人路径重新进行规划。
2.2.2 机器人路径优化
当机器人路径规划完成后,首先需要对路径进行可达性分析,判断选择的路径坐标机器人是否可以达到,点击【Robot】、【Reach Test】,将规划好的机器人坐标添加进去(如图11),图中坐标后都为,代表坐标位置机器人都可以达到。
可达性分析结束后,需要对机器人的关节进行分析,因为有些位置机器人虽然可以到达,但是可能此位置不属于机器人的理想工作范围内,长时间移动到此位置对机器人的伤害较大,右击机器人,选择Robot Viewer模块,这个模块可以实时显示机器人6个关节的角度位置并且可以判断机器人移动过程中是否在理想范围内(如图12),从图中可以看出,此位置下机器人的第二轴j2已经超出了理想范围,因此需要重新规划路径。

图10 干涉检查

图11 可达性分析

图12 Robot Viewer界面
2.3 机器人工位节拍
在机器人路径规划完成后,根据实际情况需要对机器人的控制器进行选型。控制选择完成后需要对其运动方式进行设置,机器人有LIN、PTP和CIRC等3种运动方式,分别为线性、关节和弧线运动(如图13)。
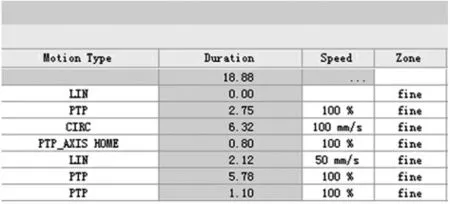
图13 机器人参数设置
当机器人的控制器和运动方式设置完成后,仿真过程与实际生产基本一致,因此仿真计算节拍有很强的参考价值,可以针对性地对机器人装配工位的生产节拍进行统计,对各机器人的工作量进行评估和平衡,最大限度地提高节拍和机器人使用率[8]。
3 机器人装配工位规划方案
通过对Process Simulation的应用研究,机器人装配工位已经形成了一套完整的数字化规划方案(如图14),将工艺规划阶段、仿真验证阶段与产品设计连接起来,对以后工程的实施有着重要的指导作用。
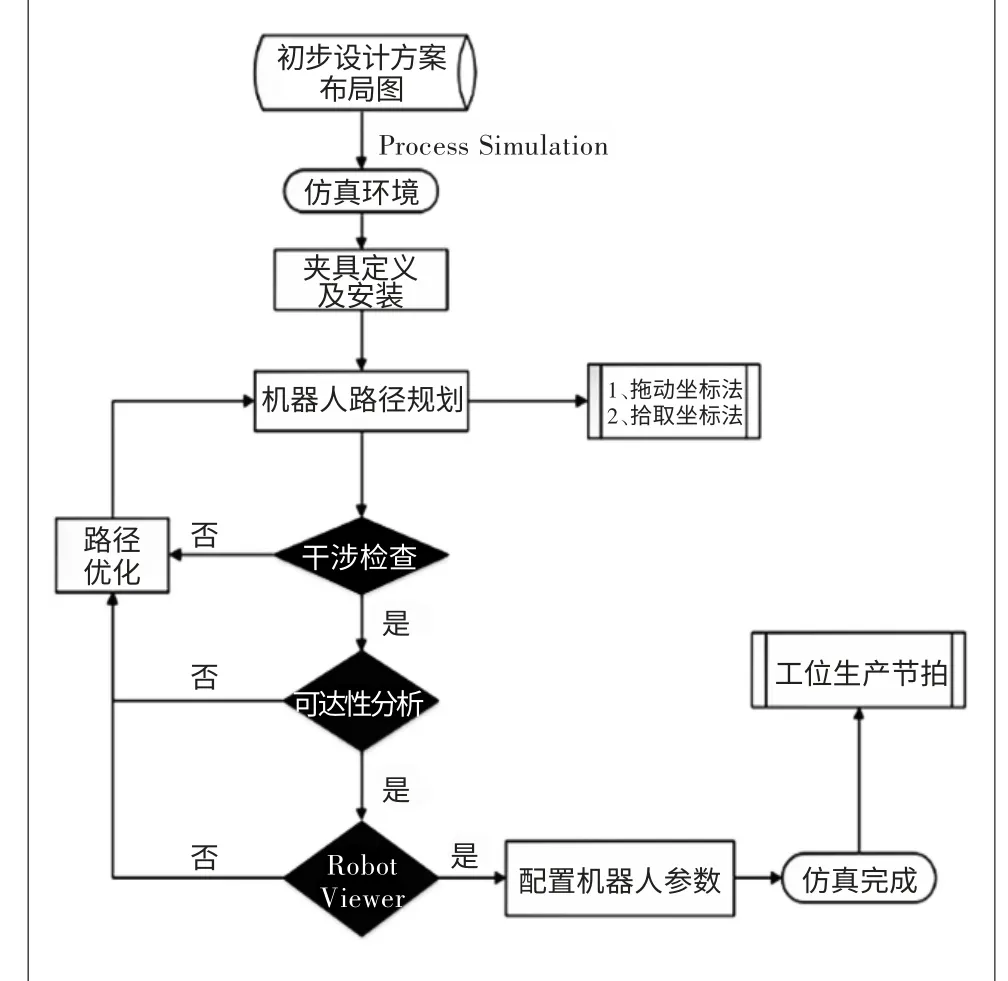
图14 数字化规划方案
4 结 语
通过Process Simulation对机器人装配工位的仿真,有效地验证了设计方案的可行性,避免了成本浪费。
在生产线规划过程中,利用精确的仿真技术,实现了对机器人装配工位的规划、设计,充分考虑了规划设计中的工艺可行性,预见了项目存在的风险,缩短了机器人的实际调试周期。
