基于H∞无迹卡尔曼滤波的退役锂离子电池SOC 估计
2020-09-08谢宝江娄伟明罗扬帆王华昕
谢宝江,娄伟明,罗扬帆,王华昕,李 珂
(1.国网浙江省电力有限公司台州供电公司,浙江 台州 318000;2.上海电力大学,上海 200090)
0 引言
锂离子电池由于其较高的比能量、较长的循环寿命和相对较低的制造成本被广泛应用于各种电动汽车[1-3]。当车用动力电池的容量衰减到初始容量的70%左右时,就不满足电动汽车续航里程和安全性能的要求而退役。退役后的电池应用到对电池性能要求不高的储能系统、UPS 等领域仍然有可观的价值[4]。由于退役电池在功率密度、能量密度和容量等方面存在着一定程度的老化现象,因此必须建立准确的电池管理系统来估计电池工作状态[5-6]。电池SOC(荷电状态)表征了电池剩余能量的变化,是能量管理和预测电池运行状态的重要依据。因此,准确估计电池的SOC 对退役电池的梯次利用和提高电池的管理技术具有重要意义[7]。
常见的SOC 估算方法包括安时积分法、开路电压法、神经网络智能算法、扩展卡尔曼滤波算法[8-9]。其中安时积分法原理简单,工程应用较多,但必须提供准确的SOC 初值。开路电压法需要静置足够长的时间,使电池达到稳定状态,这显然不适于动态条件。神经网络智能算法需要大量实验数据集来训练神经网络模型,其实际估算效果不佳。基于电池状态空间方程的卡尔曼滤波方法具有很强的适用性和通用性,克服了需要电池SOC 初值以及大量的实验数据点进行训练的问题。同时,其滤波技术可以显著降低采样噪声的影响。扩展卡尔曼滤波算法忽略了泰勒展开式的高阶项,而锂离子电池的强非线性特性会不可避免地带来较大估计误差,进而致使滤波器发散。近年来,UKF(无迹卡尔曼滤波)算法在电池SOC 估计领域比较活跃,但在实际应用中,存在以下问题:它可以在一定程度上降低噪声的影响,但异常的测量噪声仍然对滤波效果有较大的影响;由于外部因素的影响,在一个或多个采样周期内超出正常范围的采样数据将使SOC 估计算法产生误差,并且收敛速度降低。为了解决这个问题,文献[10]将系统状态噪声和观测噪声进行对称采样处理,将两者同时引入到Sigma 点采集中减小了噪声对估算精度的影响,但对模型精度要求较高。文献[11]将系统状态以其方差的平方根形式传播,降低了常规Sigma 点卡尔曼滤波器算法的复杂性,提高了对状态估计误差的抑制能力,不过未考虑到观测模型和状态方程会跟随系统不断变化。文献[12]将粒子滤波算法引入到UKF中,并通过UKF 算法计算每个粒子的估计值和协方差,解决了系统采样噪声干扰问题,但该算法固有粒子匮乏且计算量较大,在应用中实时响应性能较差。文献[13]用奇异值分解代替标准UKF的Cholesky 分解,避免了协方差矩阵非正定时滤波算法计算终止,从而抑制了系统采样过程中的非线性误差,当系统状态噪声和量测噪声二者所带来影响较大时,上述滤波算法的估计精度难以得到保证。
文章针对以上锂电池在状态估计中存在的一些问题,H∞控制具有强鲁棒性的特点,因此被广泛应用于模型动态不确定和强非线性的系统,文章提出将H∞控制和UKF 算法相结合,以提高对退役电池SOC 的估算性能。该方法利用H∞理论提高对异常值和非高斯噪声的鲁棒性。通过不断更新修正协方差矩阵保证了矩阵的半正定性,提高了滤波器的适应能力,解决传统UKF 不能跟随真实估计状态不断修正噪声方差造成估计不准甚至发散,以及数据驱动方法的不确定性问题,实现退役电池SOC 准确估算。
1 锂离子电池模型
1.1 锂离子等效电路模型
常用的电池模型包括电化学模型、神经网络模型和集总参数等效电路模型。在3 种模型中,等效电路模型因其结构简单、易于参数识别,而且能更好地反映电池动静态特性而被广泛使用。集总参数等效电路模型包括:Rint 模型、一阶RC 模型、高阶RC 模型、PNGV 模型等。本文选择一阶RC 等效电路来建立退役电池的状态空间模型。模型的电路结构如图1 所示,R0是退役电池的欧姆电阻(电阻R0,chg表示放电欧姆电阻,电阻R0,dischg表示充电欧姆电阻);Rs和Cs分别表示电池极化电阻和极化电容;It表示电池的端电流;Uocv表示电池的开路电压,与电池SOC 存在函数关系;Uout表示电池的输出电压。

图1 退役电池等效电路拓扑结构
根据电路原理,一阶RC 等效电路可表示为:

式中:SOCt代表t 时刻的SOC;η 为库伦效率,与放电速度、温度等有关;QN为电池的额定容量。
SOC 的状态方程可以描述为离散时间形式:

根据退役电池的RC 等效电路模型,选取电池核电状态SOC 和极化电压Us作为系统状态变量。电池的状态空间方程为:

式中:T 为采样时间;k 为离散时间变量。
1.2 参数辨识
常见的参数辨识算法包括最小二乘法[14]、预报误差法、极大似然估计法等。最小二乘法是一种数据优化工具,以残差平方和最小为准则实现函数的最佳匹配。其被广泛应用于各种数值分析场景中。对于诸如退役电池这种强非线性系统,可以采用最小二乘法来识别模型参数。HPPC 是测试电池充放电特性的一种测试环境,同时也作为电池参数识别的数据来源。
当电池有电流加载时,由于欧姆内阻的作用使得电池电压下降。当电池电流卸载后,极化电容放电,使电池电压缓慢抬升。将对电池进行充放电测试的过程分为10 个阶段。利用MATLAB软件对实验数据进行处理,通过最小二乘法识别SOC 各个阶段的电池模型参数。图2 为电池在SOC 值为90%并静置到稳定状态时,对电池进行脉冲放电10 s 和静置40 s 过程的电压响应过程。
电池的欧姆内阻可由电池电流加载瞬间电压的变化计算得到。若U1=3.973 V,U2=3.843 V,I=1.2 A,则得到Rs=0.108 Ω。其中:U1表示电池电量为90%并且在稳定状态时的端电压;U2表示脉冲放电电流加载瞬间电池的端电压;而电流I 是0.2 C 的持续恒定电流。
在电池的极化电容放电期间,其电压输出方程为:


图2 SOC 为0.9 时电流激励和对应的电压响应曲线
将式(6)中的Uocv,ItRs,τs看作待定系数,对方程进行系数替换可得:
式(8)—(10)为电池模型参数识别的计算公式,然后通过非线性最小二乘法拟合每个SOC阶段的电池参数。
模型中电阻电容等参数受到电池电量变化的影响。式(11)—(13)为建立的SOC 和模型参数的函数关系。

使用MATLAB 的cftool 工具箱拟合式(11)—(13)的系数。拟合曲线如图3 所示,函数表达式系数如表1—3 所示。

图3 参数辨识曲线

表1 欧姆内阻R0 与SOC 的函数关系

表2 极化内阻Rs 与SOC 的函数关系

表3 极化电容Cs 与SOC 的函数关系
1.3 模型验证
退役动力电池的等效电路模型验证采用DST(动态压力测试)工况,DST 工况是基于实车运行数据的特定电流电池工作测试方案,可以检验电池的动静态性能,其过程曲线如图4 所示。
文中所搭建的退役电池模型仿真结果与电池实测值的对比如图5 所示。由图5 可知,仿真模型能够很好反映电池的即时响应和滞后响应,符合实际电池具有的动静态特性。

图4 DST 工况过程

图5 电池模型输出电压与实际电压比较
电池仿真模型输出电压的误差曲线如图6 所示。由图6 可知,仿真模型输出端电压和电池实际端电压的绝对误差保持在0.2 V 以内。说明文中搭建的一阶RC 等效电路模型及模型参数识别的结果满足实际需求,这为后续标准UKF 算法的改进提供了有力支持。

图6 模型输出电压误差
2 HUKF 算法估计退役电池SOC
按照标准UKF 算法的原理,根据当前时刻状态和上一时刻的预测值,再结合电池状态方程式(4)和观测方程式(5),得到当前时刻的状态估计值。退役锂离子电池的离散状态空间方程可以描述为:

式中:xk,yk分别表示系统k 时刻的状态向量和观测向量;f 和h 分别为系统的状态函数和观测函数;wk表示过程噪声,由模型参数误差造成,协方差为Qk;vk表示由系统传感器采样不准确引起的测量噪声,协方差为Rk。

UKF 算法主要由4 部分构成:系统变量初始化、Sigma 点采集、时间更新和测量更新。UKF 算法利用无迹变换来处理非线性函数的预测均值和误差协方差,而不是扩展卡尔曼滤波算法的近似等效,同时也不必要对雅可比矩阵进行求导计算,因此提高了估算精度和计算速度。
2.1 标准UKF 算法
2.1.1 初始化
设初始状态变量为x0,状态变量的均值为,初始协方差为P0。则有:

2.1.2 Sigma 点采集
计算Sigma 点采样点x(i)和相应的权值ω:

式中:m 为均值权重;c 为协方差权重;参数λ=α2(n+ki)-n 是用来减小总预测误差的缩放比例系数;一般情况下α 取值较小,为0≤α≤1 用来控制平均值处Sigma 点权重;β=2,用来控制状态估计的误差,提高估算精度。
2.1.3 时间更新

2.1.4 量测更新
非线性变换Sigma 点为:

2.2 HUKF 算法
在工程应用中,UKF 算法容易受到异常采样、初始值不确定以及Cholesky 无法分解非半正定矩阵等因素的影响,导致系统发散。为了克服UKF 算法在计算协方差时遇到的病态矩阵,将H∞理论[15]运用到UKF 中,来描述系统不确定性的影响。该滤波器对于具有有界能量的所有可能干扰实现最小估计误差[16]。所设计滤波器满足如下条件:

式中:x0和P0|0分别是初始状态向量及其协方差矩阵;γ 是限制不确定性的正标量参数。
当且仅当所有时刻K 的估计误差协方差矩阵Pk|k满足式(30)时,存在式(29)中所示的H∞滤波器为:

式中:max{·}为求最大值函数;eig{·}为求矩阵特征值函数。
由以上可知,HUKF 与标准UKF 的原理和结构相似。HUKF 通过引入调整因子γ 来更新修正UKF 中计算协方差时遇到的病态矩阵,从而确保了估计误差协方差矩阵的非负定性。调整因子γ用来平衡H∞鲁棒控制和最小均方误差的性能。当γ 趋于无穷大时,HUKF 近似等效与标准UKF。这也说明标准UKF 的H∞范数可能非常大,导致对模型参数不确定性的稳定性差。HUKF 实现所有可能干扰的最小估计误差。受不确定性影响的H∞滤波器的有界误差性能可以按照文献[17]中所示的算法证明。
2.3 HUKF 算法流程
将电池状态方程式(4)以及观测方程式(5)代入上述标准UKF 算法公式中,可以得到电池SOC、极化电压Us等参数的实时预测值。算法具体步骤如下:
图7 HUKF 算法流程
3 实验与仿真分析
3.1 实验平台
为了验证本文所提出的HUKF 算法的高效性和准确性,搭建如图8 所示的锂电池测试平台。该试验测试平台可以编程控制负载电流大小,包括恒流、恒压、恒功率以及自定义电流工况放电。可与锂电池组在线状态测试设备联合工作,极大方便了实验数据获取和实验曲线的分析。与PC机对接后,可以动态显示电池工作状态的监测曲线,并可以分析和处理数据。该测试平台也带有掉电保护功能和过流、过压报警并自动停止放电。本文以从某电动公交退役的天能锂电池作为测试对象,电池型号为ITR22P22S132,其额定电压为3.7 V,额定容量为2.2 Ah。

图8 电池测试系统
3.2 算法验证
以美国制定的UDDS(城市道路循环)工况为试验条件在上述实验平台下对电池做充放电实验。电池测试的环境温度设定为23 ℃,电池SOC初值设定为0.7。采样周期为1 s,电池SOC 的理论参考值通过安时积分法获取。HUKF 和UKF 算法的SOC 估算对比曲线如图9 所示。由图9 可知,在设定SOC 错误初值(为0.5)的情况下,文中提出的HUKF 算法比UKF 算法收敛速度要快。HUKF 算法在100 s 左右能收敛到稳定阶段,而UKF 算法需要70 s 左右。这是因为UKF 权重和采样点的分布导致协方差在几次更新后失去正定性,导致过滤结果无效。当滤波效果最佳时,增益矩阵保持稳定。随着系统模型的变化,增益矩阵很难快速跟上稳态系统的需要,这就会阻止系统快速收敛。HUKF 算法通过不断更新修正协方差矩阵保证了矩阵的半正定性,这使得滤波算法得以继续进行。在算法开始阶段SOC 设定值与实际值存在较大误差时能够快速靠近真实状态,因而具有更快的跟踪速度[18-21]。
图10 是HUKF 和UKF 算法的估计误差比较曲线。由图10 可知,HUKF 算法的跟踪性能明显优于UKF 算法。一方面,HUKF 算法估计的绝对误差维持在0.05 以内,而UKF 算法的绝对误差大于0.05;另一方面,UKF 算法对于非高斯噪声和系统异常值的鲁棒性较差,在收敛阶段曲线波动较大,不能有效预测电池SOC 变化趋势,而HUKF 算法对恶劣环境的适应能力较强。
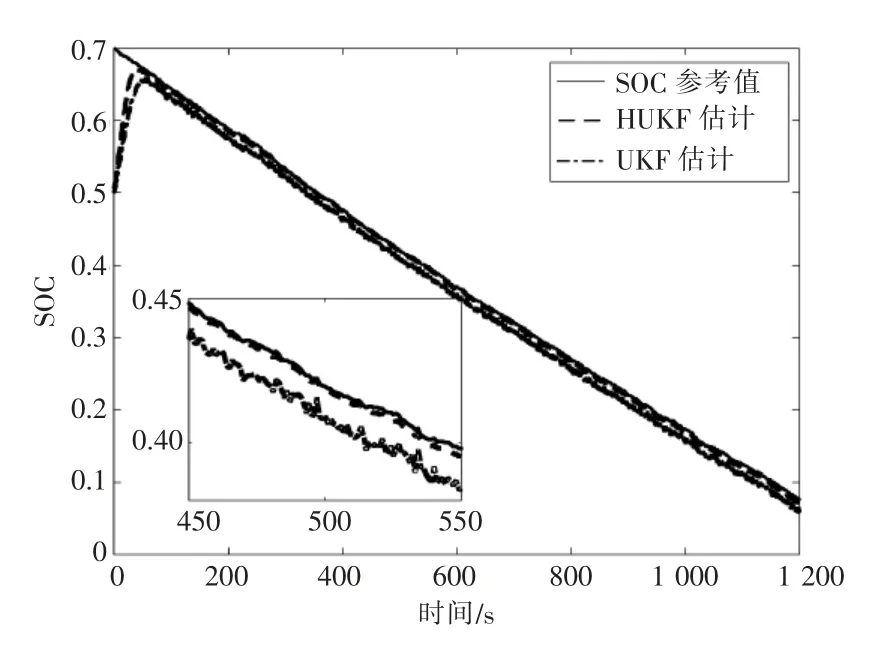
图9 UDDS 工况下HUKF 与UKF 算法SOC 估计的对比曲线

图10 UUDS 工况下SOC 估计误差对比曲线
综上所述,文中提出的HUKF 算法在收敛速度、估算精度和鲁棒性上都比UKF 有一定提高,验证了改进算法的先进性。
4 结语
UKF 算法作为经典的滤波算法,被广泛应用在目标跟踪和飞行控制等领域。H∞控制理论是解决鲁棒性问题的有效工具。文中将2 种理论相结合,应用在退役动力电池的SOC 估计中,克服了系统采样异常值和非高斯噪声的影响,保证了滤波算法得以继续进行,提高了估计算法在系统状态发生突变时的稳定性。实验结果表明,在电流工况变化剧烈情况下,HUKF 算法仍能保持比UKF 高的滤波精度和鲁棒性,同时也有一定的工程应用价值。
