具有乘性噪声和未知观测输入系统的滤波器设计
2020-09-05逄崇雁孙艳茹周明佳
科学技术创新 2020年27期
逄崇雁 孙艳茹 周明佳
(哈尔滨华德学院机器人工程学院,黑龙江 哈尔滨150025)
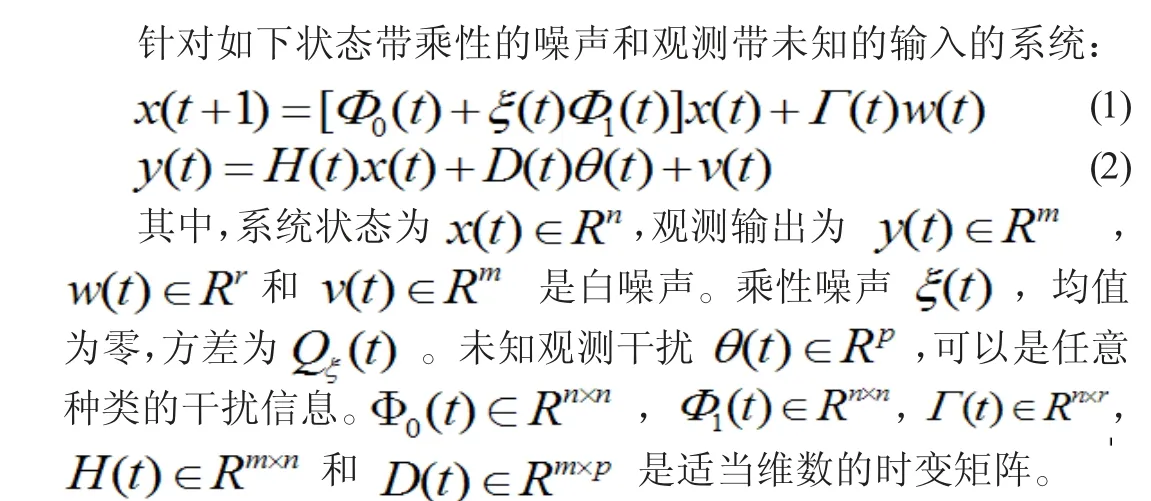
由于石油地震勘探、通信工程和目标检测与跟踪等许多实际应用问题的需要,系统对模型刻画日益严格,对仿真模型的准确性和有效性要求也越来越高。带有乘性的噪声系统的最优估计问题得到了越来越多的关注和研究。对于带乘性的噪声系统的研究大部分都是基于经典的Kalman 滤波理论进行的。而在实际系统中,除了由乘性的噪声引起的不确定性,还存在由未知的输入会给系统带来影响。这些干扰的影响,在进行实际系统的设计、建模、仿真时都需要考虑。对于具有未知的干扰输入的滤波器设计在信号与处理、通信工程、控制系统等众多领域中具有广泛应用,近年来也引起了众多学者的诸多关注。对于具有乘性的噪声干扰或者未知的输入干扰系统的研究,大多数是分开进行的。
本文在不需要未知的输入的先验信息情况下,在状态的噪声和观测的噪声是相关噪声时,对状态具有乘性的噪声,同时观测带有未知的输入的系统,基于线性无偏最小方差准则,给出与未知观测输入解耦的,Kalman 形式的递推滤波器。
1 问题阐述
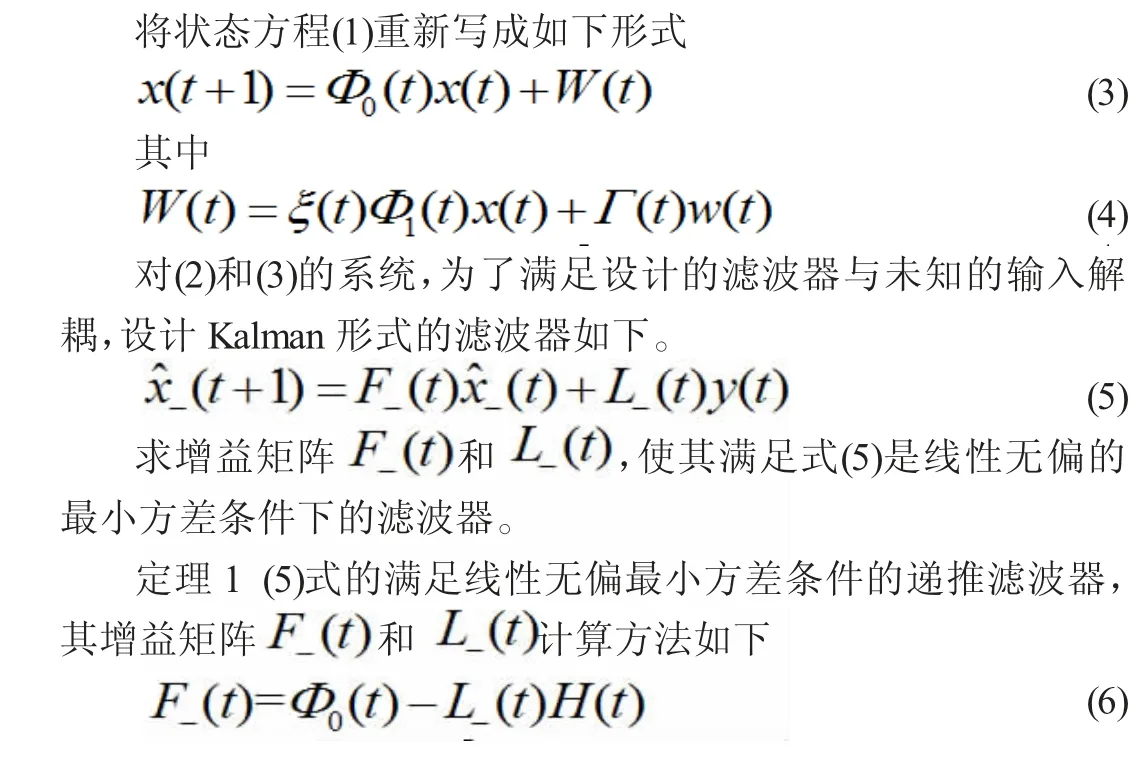
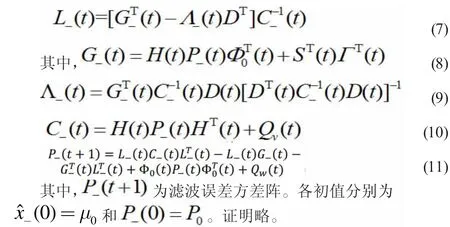
2 滤波器设计
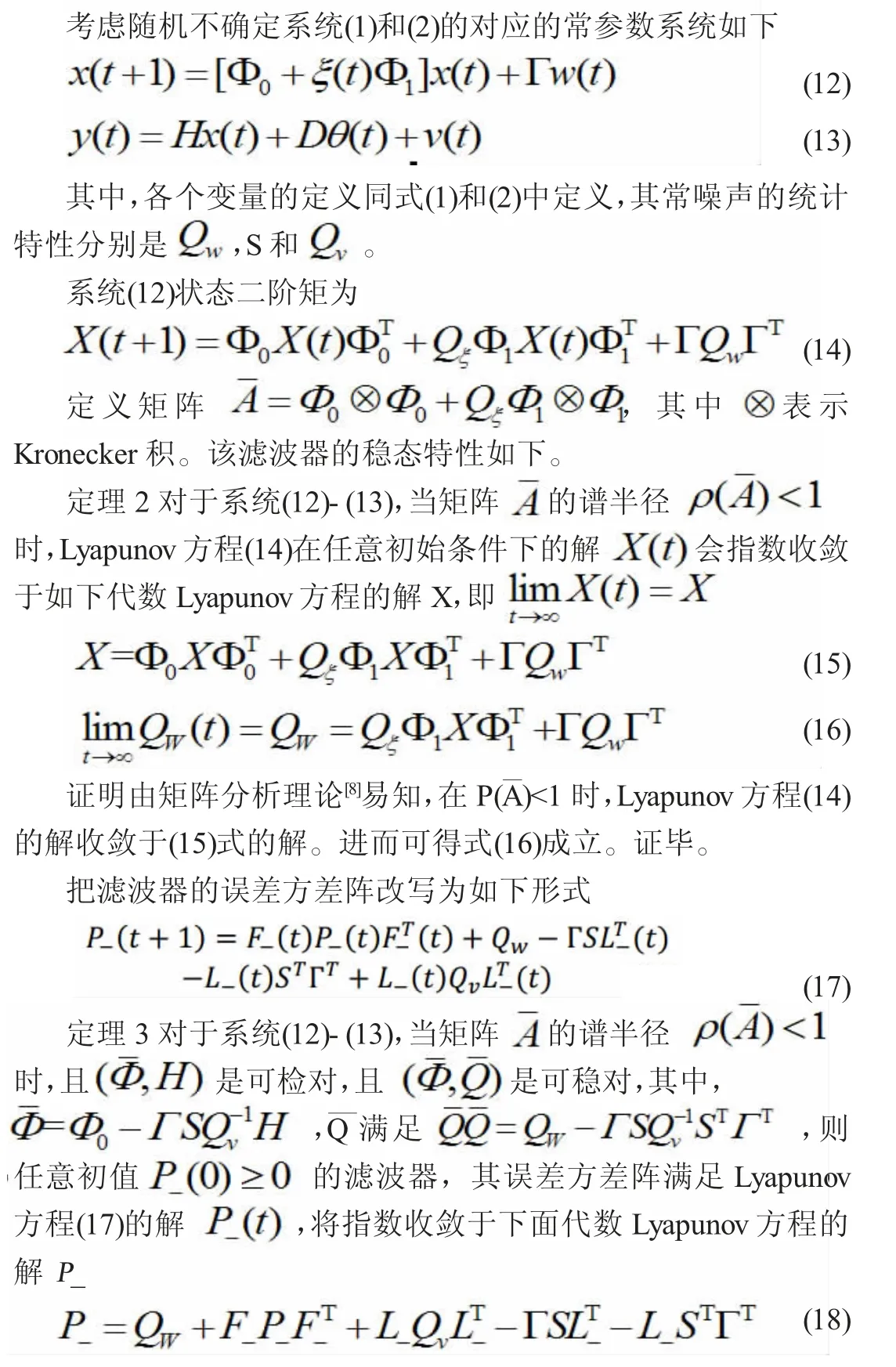
3 稳态特性分析

仿真结果如下:图1 为滤波器。其中,实线表示真实值,虚线表示估值。由图可得到,文中的滤波器,跟踪性能良好。

图1 先验滤波器跟踪图
本文对状态具有乘性的噪声和观测具有未知的输入的系统,基于线性无偏最小方差的准则,得到与未知观测输入解耦的具有Kalman 滤波器形式的滤波器,研究了滤波器的稳态特性并给出该滤波器存在稳态的一个充分条件。仿真研究验证了该算法具有良好的跟踪效果。