基于部件级三维参数化电磁模型的SAR目标物理可解释识别方法
2020-09-05文贡坚马聪慧丁柏圆宋海波
文贡坚 马聪慧 丁柏圆 宋海波
①(国防科技大学电子科学学院自动目标识别重点实验室 长沙 410073)②(航天工程大学 北京 101416)③(解放军96901部队25分队 北京 100094)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)具有全天时全天候获取大范围区域数据的能力,在侦查战场信息方面发挥了巨大作用[1]。目前主要由经验丰富的图像分析师来解译这些数据,制约了SAR在实际中优势的发挥,迫切需要发展自动目标识别(Automatic Target Recognition, ATR)技术。
林肯实验室于1992年发布了一种综合的ATR系统—半自动图像情报处理系统(Semi-Automated IMINT (IMage INTelligence) Processing,SAIP)[2]。这是一种典型的基于模板的方法,该方法将目标库的示例数据视为模板,并根据与测试图像最相似的模板完成对测试图像的分类。基于模板的方法易于实现,并且当测试图像接近或类似于模板库中的图像时,该方法可以获得良好的结果。
为了保持可用于分类的目标信息并减少算法的计算复杂度,基于模板的方法通常包括特征提取过程。在这种情况下,模板和观测图像之间的相似性是通过提取的特征进行度量的,如何设计提取合适的特征是整个识别过程的关键。目前基于模板的方法所使用的特征中,一些是从光学图像派生的传统特征,包括幅度图像的峰值、边缘和纹理等。此外,有更多的特征是专门为SAR目标识别设计的。Park等人[3]根据目标的投影长度和像素提取了12种判别特征。Anagnostopoulos等人[4]使用椭圆傅里叶描述子表征目标的形状以用于识别。此外,线性子空间、维数约减和稀疏表示等方法也被引入SAR ATR中[5,6]。Dong等人[7]提出了一种基于单演信号稀疏表示的目标分类方法。散射中心特征,例如属性散射中心,也被证明对SAR ATR有效[8,9]。图像以其在较低维度空间中的投影形式表示,这能捕获目标大部分的重要特征。这类方法的例子包括主成分分析(Principal Component Analysis, PCA)[5]、线性判别分析(Linear Discriminant Analysis,LDA)[5]和非负矩阵分解[6]等。Liu等人[10]基于流形学习理论从二维图像矩阵中提取了样本判别分析特征。Huang等人[11]引入邻域几何中心缩放以构造邻域关系,最终完成特征提取。这些方法旨在通过计算具有常数的转换向量,将每个数据回归到其标记向量。总地来说,在这类方法中,大部分工作集中在如何设计一组合适的特征提取器来表示目标,以及如何利用这些特征向量来训练分类器进行识别。这些人工设计的特征提取器通常与具体数据及特定的应用背景有直接关系,并且会显著影响识别精度。
最近对卷积神经网络(Convolutional Neural Network, CNN)的诸多研究显示了它们在目标分类和识别任务中的巨大优势,并为基于学习的SAR ATR带来了新的繁荣。CNN由两阶段架构构成:特征提取阶段和分类阶段。其所使用的特征不是人工设计的,而是从像素到分类器逐层学习得到的。每一层都从上一层的输出中提取特征,然后将所有层联合起来进行训练。Ding等人[12]利用CNN对训练数据进行特定域的数据增强操作(平移,散斑噪声和姿态合成)以用于SAR目标识别。Chen等人[13]提出了一种全卷积网络(A-ConvNets)来减少自由参数的数量,以避免由于有限的训练图像而导致严重的过度拟合。这些工作表明基于CNN的方法可以有效地学习和保留目标的二维结构信息,从而有助于提高识别性能。
尽管以上基于模板的方法很受欢迎,但是有两个主要因素限制了其在实际情况下的性能。一方面,获得有效的训练数据既昂贵又耗时[14]。另一方面,这些训练样本无法涵盖场景参数、目标姿态和扩展操作条件(EOC,指的是在实际战场场景下的遮挡、掩体、连接、重新配置和多样化的背景)下的所有情况[15,16],这会导致识别性能的下降。
为了克服模板方法在表征目标方面的缺陷,基于模型的方法被提出。该方法通过合适的模型而不是模板来编码目标的先验信息。在DARPA和空军联合提出的具有代表性的动静目标捕获与识别(Moving and Stationary Target Acquisition and Recognition, MSTAR)项目[17]中,目标的散射是基于其CAD模型通过高频计算软件来模拟的。将在线候选目标的CAD模型预测的参考特征与从未知类型目标提取的特征进行匹配。然后,将支持或反驳候选目标的证据作为匹配分数进行累积,以确定该候选目标解释观测图像的程度。最后,将未知目标判别为具有最高匹配分数的候选目标。在这种基于物理模型的表达式中,其是通过基于目标物理模型的电磁计算来模拟目标散射响应的,因而该方法还可以很容易地在线预测不同视角下的特征(例如峰值、灰度、标签和山脊等)。而且在该方法中,目标的散射与目标的物理部分具有直接对应关系,这在目标的预测特征和其几何结构之间保持了良好的对应关系。因此,模型可以被灵活地重新配置并添加多变的EOC背景。这些优势使得基于模型的方法具备在现实情况下解决ATR问题的潜力。因此,基于模型的方法已成为SAR ATR的新趋势。基于物理模型识别由于要将模型预测的散射中心与从观测图像中提取的散射中心进行匹配,因而导致其应用实际的一个的主要困难在于计算上昂贵的穷举搜索步骤,特别是当预测特征集或测试特征集中存在缺失或虚假特征时。此外,当目标出现配置、连接或遮挡的变化时,模型需要重新动态建模,而且还需要大量的电磁计算。这些缺陷使该方法既耗时又效率低下。
在高频域,一个目标的散射响应可以很好地近似为各个散射中心的响应之和[18]。散射中心模型可以对目标的电磁散射响应提供物理上相关且简洁的参数化描述。通常,模型是精度和简洁性之间的平衡。一方面,该模型是一个数值近似值,以适应目标在数据域中的散射响应。另一方面,该模型使得参数在物理上是有意义的。在这种基于参数化散射模型的ATR中,目标是由多个散射中心表示的,而反过来散射中心又可被用作识别目标的特征。该识别问题被视为将模型预测的参数特征与从观测图像中提取的特征进行匹配的问题。散射中心包含目标的位置和幅度信息,这些信息可以被视为一个属性集。那么首先在散射中心提取阶段,从参考图像和观测图像中获得可以充分描述目标散射特性的散射中心。接下来通过匹配阶段来对应散射体,并根据参考图像和观测图像求解两个散射体集之间的变换关系。然后,基于散射体的匹配结果设计匹配得分。最后在识别阶段,根据匹配分数将目标分类为合适的参考目标类别。具体而言,Chiang等人[19]提出了一种贝叶斯方法,其中模型预测的散射体和数据提取的散射体在匹配阶段进行组合,以计算候选假设的后验概率。其中遮挡被视为散射体丢失问题,并且散射体之间的关系被忽略了。在实际情况中,由于杂波和其他非理想因素,总是存在冗余或丢失的散射体,这使得散射体匹配成为一个难题。Zhou等人[20]提出了一种区域到点匹配的方法,该方法易于实现并且对诸如噪声和姿态估计误差之类的非理想因素不敏感。散射体匹配方法中存在两个棘手的问题:首先,很难从SAR数据中提取散射体,并且可能会遗漏或错误地提取某些散射体。其次,当存在丢失或错误的散射体时,很难建立两个散射体组之间的一一对应关系。这两个因素可能会增加计算负担,并降低目标识别的准确性和可靠性。此外,在某些情况下,模型中某一部件的散射可以通过几个散射中心表示。因此,很难在模型和物理目标之间建立直接的对应关系。因此,很难更改参数化模型使其适用于重新配置的情况,更不用说知识层的推理和解译了。
为了克服上述缺点并保持上述模型的优点,针对SAR ATR[20—24]和雷达测量[25,26],3-D散射中心模型[21,22,27—29]被提出来,其中部件级三维参数化电磁模型(Three Dimensional Parametric Electromagnetic Part Mode, 3D-PEPM)[21,22]就是典型定位代表。在此模型中,目标通过一组属性电磁部件(例如高帽,二面体,三面体,平板等)描述。其中散射机制和目标特性都被编码在这些典型的电磁部件中,并且每个部件的参数与目标的物理结构有着清晰的关系。这些稳定且物理上有意义的参数可用于目标理解和推理,这使得3D-PEPM成为一个良好候选特征以用于ATR。而且,其可以以更简单的方式模拟目标姿态和连接方式的变化,以优化EOC情况下的识别效果。因此,3D-PEPM为有望解决实际情况中多变性的部件级目标识别方法提供了一个新的方向[22]。
本文在文献[22]的基础上,更加详细地描述了基于3D-PEPM的SAR ATR框架,尤其是目标识别过程中所采用的具体方法和策略。本文ATR框架主要涉及如下3个子问题:(1) 3D-PEPM到2D测量平面投影;在给定测量测试的条件下,利用3D-PEPM获得相应的模型投影特征。(2) 3D-PEPM和观测数据之间的相似度测量;对观测数据进行特征提取并与3D-PEPM投影特征进行相似度计算。(3) 参数寻优。通过调整模型的参数,对当前观测样本与模型之间的相似度进行最大化寻优,获得观测数据与模型之间的真实相似度。
本文主要贡献是基于部件级3D-PEPM的SAR ATR的理论和实验结果。更加关注方法的可扩展性、鲁棒性和在散射体的物理层面可理解的实验结果。所提基于散射体的框架不是在整个目标层面上获得一个匹配分数,而是针对目标中每个散射体得到一个匹配分数。所有散射体的匹配得分都用于对目标物理结构的理解。整个匹配测量过程使用了从粗到精的策略,粗层面是度量整个目标的相似性,而精层面是度量目标中各个散射体的相似性并汇总各个散射体的匹配分数,以便对整个目标进行理解和识别。这样就可以获得目标详细的信息。基于3D-PEPM的ATR方法具有能提供2D SAR图像中的特征和像素与模型上的物理几何结构的对应信息这样一个显着优势,其有助于从物理层面上理解观测目标。
本文其余章节安排如下:在第2节中,简要介绍了3D-PEPM,并概述了基于3D-PEPM的ATR框架;第3节讨论了3D-PEPM投影问题;在第4节中,度量了3D-PEPM与观测SAR数据之间的相似性并研究了视角调整问题;第5节介绍了使用仿真数据进行的实验;第6节给出总结。
2 基于3D-PEPM的ATR框架
在本节中,首先简要介绍三维参数电磁部件模型(3D-PEPM),然后提出了基于3D-PEPM的ATR框架。
2.1 三维参数化电磁部件模型 (3D-PEPM)
在高频区域,目标的散射场可以看作是几个独立散射体的散射之和[18]。在前向构建的3 DPEPM中,经验丰富的操作人员会根据电磁理论将一个复杂目标分为多个几何部件,复杂目标的散射响应与这些部件的散射响应关系为

其中, EModel(f,θ,φ;S)表 示目标在雷达频率 f、视角(即仰角 θ和方位角 φ)下的散射响应。S =[S1,S2,··,Sn]是 散射体集,其中 Si包 括第i散射体的参数。 EiModel代表第i散射体的散射响应。
在本文中,前向参数化3D-PEPM嵌入了目标更多的属性先验信息。每个散射体的散射响应可以表示为

其中,属性集 Si=[Ai,xi,yi,zi,αi,li]包 含了第i散射体丰富的物理属性。 Ai表示散射体的振幅。xi,yi,zi是散射体在3D目标坐标系中的空间位置。PiModel是散射形状函数,在不同的散射机理上有所不同。 αi表 示频率依赖因子,li是散射体的长度。
3D-PEPM具有以下特征:
(1) 它使用参数化方法来表征目标在频率、仰角和方位角下的3D电磁散射。当这些参数被设定后,可以有效地获得目标在不同视角和频率下的散射场。
(2) 目标表示为多个散射部件的组合。通过描述每个部件的散射特性,3D-PEPM可以表征整个目标的散射响应。由于这些散射体的散射与目标的物理结构密切相关,因此进行部件级的推理和识别是可行的。而且可以重新布置散射体以模拟对目标不同的操作条件,这意味着3D-PEPM具有应对目标变化的潜力。
(3) 每个散射体的散射响应对应于目标某一几何结构,该结构涉及目标某些相关的物理属性。那么每个散射体的属性信息可以清晰地显示出目标的组成,并有助于人类对目标的理解。
2.2 3D-PEPM驱动的ATR框架
基于3D-PEPM的ATR框架的流程图如图1所示,主要涉及3个子问题:(1) 模型投影;(2)相似度计算;(3) 视角调整。
(1) 模型投影。给定传感器的数据采集测量参数以及包括频率、极化、近似仰角和方位角的成像几何,投影将产生仿真散射数据。在这一部分中,在模型散射数据生成过程中考虑了所有测量参数的情况。因此,当没有噪声或其他干扰时,3D-PEPM产生的数据与观测数据相同。由于3D-PEPM由散射体组成,因此通过对3D-PEPM的投影可以获得任意视角下单个散射体的投影信息和整个目标的投影信息。
(2) 相似度计算。通过相似度计算可以知道3D-PEPM与观测数据之间的散射体对应关系。将3D-PEPM投影到2D图像平面后,基于散射体的特性可检查各个部件是否存在并评估该部件的相似度,那样可以对目标有一个全面的了解。此外根据该模型可以直接建立数据提取的散射体和模型预测的散射体之间的对应关系,并获得每个散射体对对应的相似度,这便给出了观测图像中的目标如何与3D-PEPM相似的清晰解释。另外,由于3D-PEPM是基于目标中每个散射体的物理实体构造的,因此散射体匹配结果将更深入地揭示散射体在目标物理结构中的散射情况,从而在散射体层面解释观测数据。而且该基于散射体部件的方法具有噪声鲁棒性并且适用于部分遮挡的情况。
(3) 视角调整。由于雷达与目标的视角(包括仰角和方位角)只能近似估计,视角的最优估计是通过迭代不断优化整个过程并调整视角,在3D-PEPM和SAR数据之间产生最佳的相似度测量值时得到的。
3 3D-PEPM向二维图像平面投影
基于3D-PEPM的ATR方法的基本思想是通过散射体识别目标。每个散射体的属性分别通过3DPEPM进行预测并从测得的SAR数据中提取出来。3D-PEPM描述了在3D空间中视角变化时目标电磁散射响应的变化,而SAR数据是在2D图像平面中测量的。为了使这两项具有可比性,我们引入传感器的测量参数将3D-PEPM投影到2D测量平面,从而在2D图像域中生成每个散射体的散射数据和特征(例如位置和散射特性)。空间位置描述了散射部件的几何信息,而散射体形状描述了散射体的属性。在这一部分中,误差校正试图使模型产生的数据与测量数据相同,以弱化测量过程中引起的非理想因素。
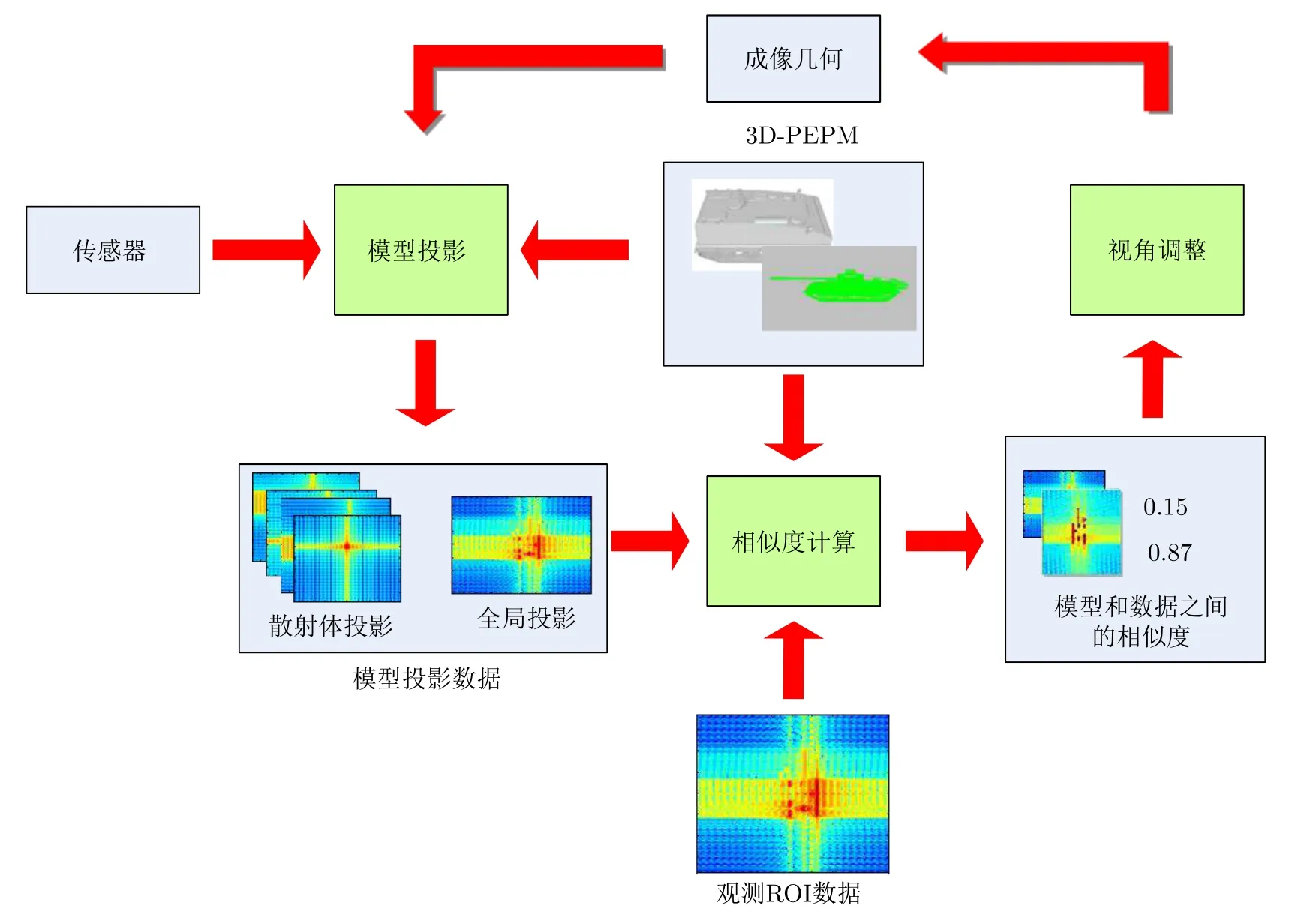
图 1 基于3D-PEPM ATR框架的流程图Fig. 1 The flow chart based on 3D-PEPM ATR framework
3.1 3D-PEPM的投影
图2 显示了在聚束模式下侧视SAR的成像几何。为了简化讨论过程,假定目标坐标系和测量坐标系一致。假设雷达沿着飞行路径移动并在视线(Line Of Sight, LOS)方向上测量目标,那么覆盖飞行路径和LOS的平面被叫做成像平面或测量平面。如SAR成像几何所示方位角为 φ , 仰角为θ 。
目标坐标系中的一个3D点 S3D=(x,y,z)T可以通过旋转矩阵 R投影到2D成像平面中。其中旋转矩阵 R为

在成像平面中,将第3个坐标设置为零,则3D散射中心 S3D产 生的2D位置参数 s2D=(x2i,y2i)T可以表示为

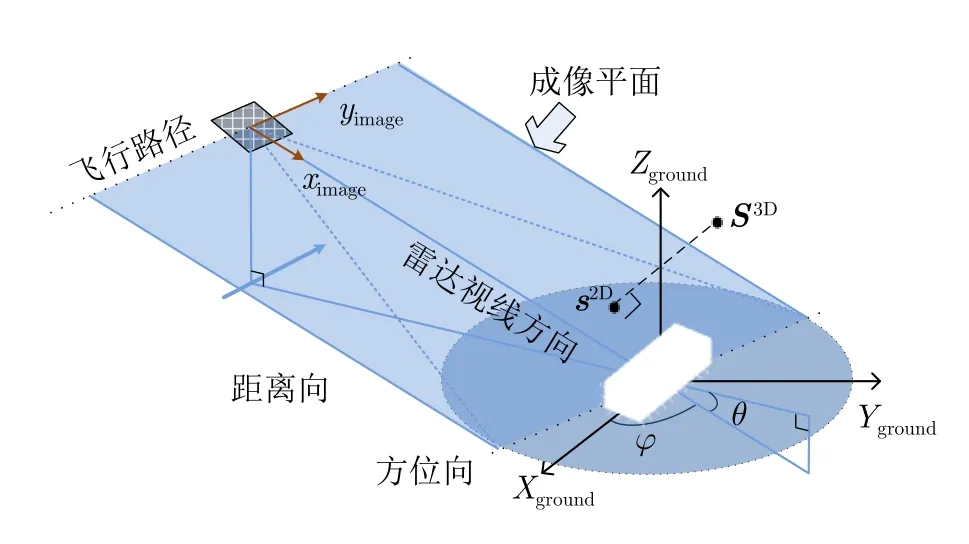
图 2 SAR成像几何Fig. 2 SAR imaging geometry
其中,矩阵 H表示3D到2D的投影矩阵。
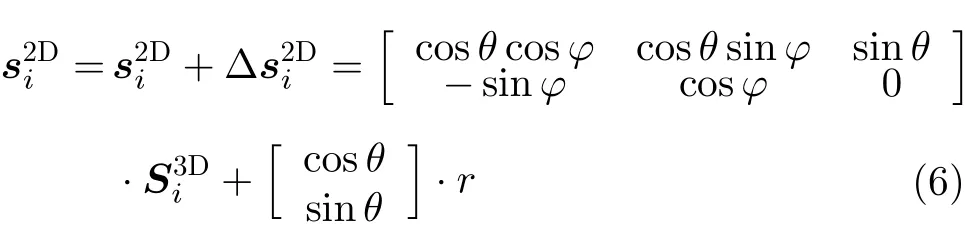
对于具有一定几何长度的散射结构而言,在不同视线下,散射中心的位置会产生偏移,故在投影中还需考虑其变化。对于半径为 r的圆柱面散射部件而言,不同视线下,散射中心会发生位置偏移

则,圆柱面散射部件的等效散射中心坐标为
对于长度为 L的散射部件,在大侧视角度范围下表现为两个端点处的散射点,只有在小角度下(譬如:—5°~5°)可见,理论上的投影变化关系为

为了较好地描述散射体的形状属性,其代表性的特征应足够丰富以区别不同的散射体,并具有鲁棒性。从理论上讲,所有这些参数Si=[Ai,xi,yi,zi,αi,li]可以用于更好地描述散射体。但是 α对噪声和杂波敏感。因此在本文方法中,引入图像块的能量来描述散射体的外观,每个散射体的能量可以通过式(8)方式获得

其中, f e2i为 在设定的成像条件下第i个散射部件的电磁散射回波能量,‖ · ‖2是l2范数。
因此,通过将3D-PEPM投影到2D平面上,可以获得每个散射体的位置 (x2i,y2i)及其散射属性fe2i。 投影后得到的特征用 SR={s1R,s2R,··,snR}和
3.2 误差校正
通常通过3D-PEPM投影得到的2D图像和通过实际飞行传感器观测得到的图像之间可能会有差异。这些差异可能是由多种因素引起的:SAR传感器的特性(包括工作模式、发射信号、天线方向图调制)、平台的运动(包括速度、加速度、轨迹、侧倾、俯仰和偏航)、成像和后处理算法、大气衰减、地形、测量误差等。其中一些因素可以预先确定或在事后测量,而其他因素则是不确定的。本节将尝试校正这些差异,提高投影图像和观测图像之间的相似度,并降低两个图像中散射体的位置错误率。为此目的,针对不同情况提出了两种方法,它们可以单独使用或一起使用。
(1) 可量化的误差纠正。一般情况下是可以定量测量由SAR传感器和平台这两种因素引起的误差。通过各种仪器(信号记录仪、信号分析仪、飞行记录仪)可以建立误差的精确数学模型。在这种情况下,可以根据实际SAR传感器的工作参数和工作模式,模拟从发射线性调频信号到照射表征复杂目标的3D-PEPM以及最后接收的回波信号整个物理过程。那么仿真系统中的误差数学模型可以用于获得带有误差的3D-PEPM投影,则可以通过误差数学模型的校正减小投影图像和实际观测图像之间的差异。例如,通过仿真可以降低由SAR传感器侧倾引起的图像失真。
(2) 不可量化的误差纠正。对由成像和后处理算法、大气衰减、地形、测量误差等引起的误差,通常无法通过数学模型对其进行建模。而且一些成像和后处理算法是没有公开的。因此,无法通过系统仿真方法缩小由这些因素引起的误差。在这种情况下,基于统计几何校准和相对辐射校准,可以利用与观测数据同时获取的标准外部校准数据减少这一误差。图3显示了几何校准器和辐射校准器阵列的例子。
在所观测的图像中,与地面真实目标相比,几何变形(目标的几何形状、大小、方向和其他特征)是位移、缩放、旋转、扭曲、弯曲和其他变形的综合结果。通过根据带有控制点的外部校准数据对该变形进行几何校准。在这种校准方法中,预先在SAR扫描区域内将反射器摆放在合适的位置和角度上。在测量之后,在实际观测的图像中找到这些反射器的对应位置。接下来,将地面真实情况下的控制点与图像坐标系中的像素相对应。然后可以计算出变形矩阵中的各个参数。最后,根据该变形矩阵对图像进行校准。因此根据变换函数,对于校准后的新图像中的每个像素,可以估计出其在原始图像上的位置。

图 3 几何和辐射校正阵列Fig. 3 Geometric and radiometric correction array
辐射误差是目标电磁反射功率的真实值与其测量值之间的差。辐射校准是在给定位置区域上布置各种具有已知反向散射系数的角反射器的基础上进行的。通过提取观测图像中与反射器对应的像素幅值,可以采用拟合的方法获得辐射校准曲线。最后,对整幅图像进行相对辐射校准。
4 3D-PEPM和SAR数据的相似度测量和视角优化调整
3D-PEPM和SAR数据之间的相似度测量是基于3D-PEPM的ATR的重要组成部分之一。本节中首先描述了测量的体系结构,然后讨论了量化观测数据与3D-PEPM匹配分数的几种测量方法。
图4给出了基于3D-PEPM的SAR ATR框架中3D-PEPM与数据之间相似度测量过程。我们将3D-PEPM的散射先验信息引入到测量过程中,进而提出了一种新的3D-PEPM与SAR数据之间的相似度测量方法。首先,利用由3D-PEPM预测的每个散射体的位置和散射响应的信息,指导从2D SAR数据中提取散射体。其次,通过假设检验方法一一计算所有散射体对的相似度。然后将这些相似度合成为整体相似度或匹配分数。另外,整个过程增加了方位角搜索策略以用于调整视角并得到最佳相似度。这样就获得了3D-PEPM和2D SAR数据之间的相似度。
4.1 2D SAR数据的参数估计
根据属性散射中心模型,可以将二维SAR数据表示为
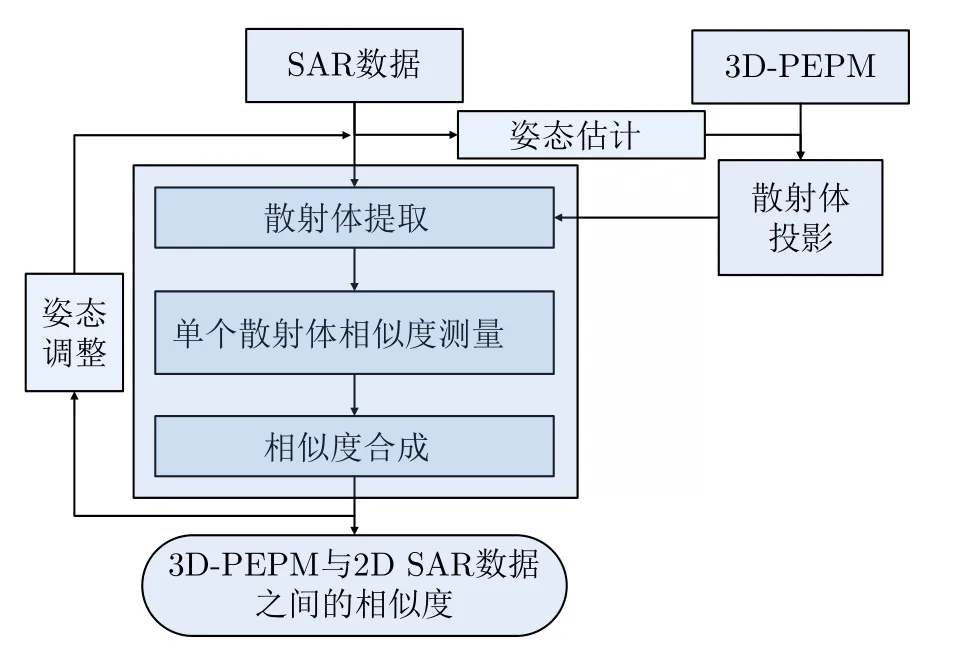
图 4 相似度测量框架Fig. 4 Similarity measurement framework

其中, E (f,φ;S)代 表模型项, S =[S1,S2,··,Sp]表示 p个散射体; N (f,φ)表示噪声项,其被建模为高斯白过程。
散射体参数估计的表达式为[8]

本文使用近似最大似然(Approximate Maximum Likelihood, AML)算法从观测图像中提取散射体。AML算法的详细描述可以参考文献[8]。然后,从观测图像中得到的第i散射体的估计参数集为Si=[Ae,xe,ye,Le,αe]T。
4.2 相似度测量
在3D-PEPM与SAR数据之间的散射体相似度测量过程中,一些准则应该被考虑:
(1) 每个散射体的位置和属性参数都应用于相似度的测量,因为与其余参数相比,这些参数具有更高的可靠性。
(2) 相似度测量方法应足够鲁棒,以应对3DPEPM与观测数据之间可能存在的不一致问题。
(3) 散射体与目标物理部分之间的对应关系应该用于基于知识的目标识别。
基于上述准则,本文提出了几种相似度测量方法。接下来将逐一介绍这些方法。
(1) 基于散射体区域特征的相似度测量。每个散射体的散射响应在频域和图像域均不相同。在这一部分中,我们将通过图像域中的散射响应来评估每个散射体对的相似度。为了较好的利用和描述散射响应,我们定义了散射主能量区域和第2能量区域为
在图像中,主能量区域 Rm覆盖了大部分散射能量,而第2能量区域 Rs描述了较弱的散射。假设这两个区域的散射共同表征了一个散射体的散射。在实验中,设定 η1=90% 和η2=90%。
此外,根据这些区域定义了一个散射对的相似度为
其中, fe 是 测量图像的能量, fRs是测量图像中区域 Rs的 能量,σe是控制参数。
(2) 基于假设检验的相似度测量。假设检验是统计数据分析中的重要工具[30,31],可用于判断样本是否来自特定的概率分布。对具有给定属性的目标称之为零假设 H0, 相反的是另一种假设 H1。假设目标服从均值为 μ0且 方差为 σ0的正态分布,对其有n个观测样本且均值为 x¯ , 检验统计量计算为|z|=这里 C是由显着性水平 αS(0 ≤ αS≤ 1)确定的阈值。
这一方法将单个散射体对的相似性评估转换为假设检验问题。这里零假设设置为“SAR图像中存在模型预测的散射体”。然后为每个参数建立统计模型并计算检验统计量以确定假设检验的结果。概率 p设置为单个散射对的相似度f (si)。考虑到参数αi对 噪声和杂波敏感,我们仅使用 Ai,xi,yi,li参数并且它们的高斯分布参数如表1所示。
对于目标的整个图像,散射体根据模型中的能量从最强到最弱排序。之后,依次对每个散射体对执行假设检验。当通过假设检验确认某个散射体对的相似度时,将其散射响应从图像中移除以避免其干扰其他散射体。

表 1 参数的统计模型Tab. 1 Statistical model of parameters
4.3 相似度合成
应当基于所有散射体的相似度来合成整个目标的相似性。可以使用不同的方法来实现此目的。这里我们提出以下3种简单而有效的策略:D-S证据规则,求和规则和SVM训练规则。
(1) D-S证据规则。D-S证据理论是一种可将不同来源的信息进行组合并做出更可靠决策的经典方法[32,33]。因此,其可以用来组合来自不同散射体的相似度,其中每个散射体的相似度均作为证据。每个散射体的相似度 f (si)都是D-S融合中的基本概率分配值。在给定视角下,3D-PEPM和SAR数据之间的组合相似度为
(2) 求和规则和SVM训练规则。另一个直观的想法是将各个散射点的相似度相结合,通过对它们进行求和来产生全局相似度

其中, ki是 散射体i的权重系数。该计算公式可以是不加权平均(即 ki=1/N),也可以根据各个散射体的重要性为权重系数分配不同的值。
权重值也可以以使用最大利润率SVM框架从验证样本中获得的分数为依据学习得到。给定具有部件匹配得分的正验证样本 SP和 负验证样本 SN,我们希望通过最小化如下结构化的预测目标函数学习得到权重k i[34]

在训练过程中,限定权重 ki> 0.001。权衡参数 W通过5重交叉验证得到。这个问题可以通过标准的优化软件包来解决。学习得到的结果 ki可以看作是部件对于判断目标存在的权重贡献。
至此得到了一个视角下的3D-PEPM和SAR数据之间的相似度。在实验中使用了D-S证据规则并获得了令人满意的结果。
4.4 视角优化搜索
观测仰角 θ可以根据雷达平台的飞行高度及雷达与目标之间的距离近似估算,可以认为是已知值。而从观测图像估计的方位角可能与其真实值有一些差异,分别用 a zi0和 Δ azi表示估计的方位角和估计误差。本文在一个方位角范围[azi0-Δazi,azi0+Δazi]内计算目标的相似度。在每个方位角azik(azik∈[azi0-Δazi,azi0+Δazi]),计算得到一个相似度 mk。 选择产生最高相似度 mp的方位角azip作为最佳视角,并将3D-PEPM与2D SAR数据之间的相似度设定为 mp。
从目标识别的角度来看,可以将相似度用作3D-PEPM和2D SAR数据之间的匹配分数。当相似度高于预设阈值 fH时,将模型视为候选类型,即它可能是观测数据中的未知目标的类别。相反,如果相似度低于预设阈值 fL,我们认为观测数据中的目标与模型无关。当观测图像与一个模型匹配而与其他模型显着不同时,将观测样本指定为模型对应的类别是合理的。
5 实验
5.1 实验设置
(1) 3D-PEPM 。3D-PEPM是基于如图5所示的目标CAD模型以前向的方式构造的。目标由具有理想散射特性的简单散射体(三面角、二面角、顶帽和平面)组成,如图6所示。通过比较模型生成的散射数据和基于电磁仿真软件计算得到的CAD模型的散射数据,可以验证3D-PEPM的有效性。这两个模型对应的数据集的RCS对比如图7所示。不同视角下基于3D-PEPM生成的SAR图像如图8所示。

图 5 简易坦克的CAD模型Fig. 5 CAD model of the simple tank
(2) 观测SAR数据。EM仿真软件利用目标的CAD模型产生的仿真散射数据被设置为观测数据,其被用来说明本文算法的整个处理过程并验证算法的可行性。本实验使用了3种CAD模型。与3D-PEPM具有相同目标类型的坦克模型用于检测算法的正确识别率,与3D-PEPM不同目标类型的装甲车模型和slicy目标模型[2]用于检测算法的虚警率。仿真所使用的雷达信号是一个步进频率脉冲信号,其中心频率为f0=9 GHz,频点数为M=101且频率间隔为10 MHz。合成孔径的方位角角度范围为5°,角度个数为N=101,则角度间隔为0.05°。给定中心方位角 φ 和 仰角 θ,可以生成一个SAR图像数据。在实验中, θ在[20°~28°]范围内以2°等间隔取值,φ在[5°~160°]范围内以5°等间隔取值,那么每种模型都有 5 ×32=160幅观测图像。图9显示了这些数据集中在相同视角下3个模型的图像。

图 6 简易坦克中的散射体Fig. 6 Scatterers in the simple tank
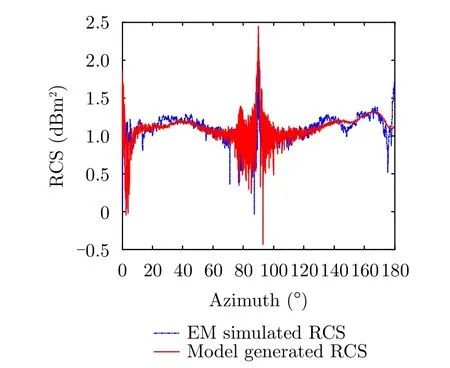
图 7 模型和EM仿真软件产生的目标RCS对比Fig. 7 Comparison of target RCS generated by 3D-PEPM and EM simulation software
图 8 不同视角下基于3D-PEPM生成的图像Fig. 8 Images generated from different perspectives based on 3D-PEPM
5.2 实验结果
本节测试了不同情况下基于3D-PEPM的ATR方法的性能。通过假设检验方法计算单个散射体的相似度,并使用D-S证据方法来合成整个目标的相似度。
(1) 理想情况下的相似度测量。图10(a)显示了θ= 3 0°和 φ=90°在坦克目标的仿真图像。表1列出了假设检验中各参数的统计模型。实验中将显着性水平和检验阈值分别设置为0.05和1.96。给定的姿态下,共有10个可见的散射体。表2对比了从3D-PEPM投影得到的散射体参数与从对应观测数据估计得到的散射体参数,同时也列出了它们的相似度。由表2可知,3D-PEPM中的散射体可以以很高的概率在观测数据中找到其对应部分。在特定视角下,模型中大多数的散射体的相似度超过了0.5,并且根据式(13)计算得到的融合相似度为0.752。
图 9 相同视角下3个模型的观测图像Fig. 9 Observation images of three models in the same perspective
3D-PEPM中的散射体与目标中的实际物理部分相关。如图10所示,基于模型得到的图像中的像素与坦克目标的表面是有关的。图11给出了一个更加直观的例子,模型图像中编号为1的散射体对应于目标中编号为11的二面角;模型图像中编号为5的散射体对应于目标中编号为5的圆柱体。这样,可以建立物理模型与观测SAR数据之间的联系,有助于理解和推理被观测的目标。
通过基于模型的目标识别方法的处理流程,与三维电磁散射模型匹配得到的相似度结果如图12所示。从该结果可以看出3类数据在相似度上有着较大的差异。其中,坦克目标的相似度较高,而装甲车目标和SLICY目标的相似度一直保持在较低的水平,这也与实际情况是相符的。最终确定目标的类别时,当匹配度大于给定的阈值,可认为该测试目标与模型所表示的目标类别是相同的。否则,测试目标与模型的目标类别不一致。在设定阈值fT=0.35的条件下,160幅坦克测试数据中的156幅数据被正确识别为模型目标类别,同时160幅装甲车数据中的153幅数据和所有的SLICY数据被正确识别为不属于模型所表示的目标类别。
图 10 模型图像和3D-PEPM物理相关的散射体Fig. 10 Model image and 3D-PEPM physically related scatterers

表 2 模型投影和从数据估计得到的散射体参数的对比Tab. 2 Comparison between model projection and scatterer parameters estimated from data
图 11 模型图像和3D-PEPM物理相关的散射体Fig. 11 Model image and 3D-PEPM physically related scatterers
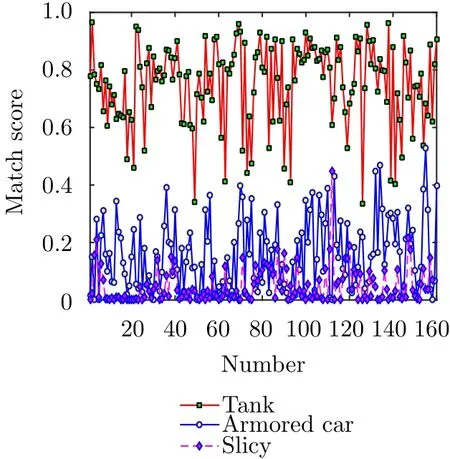
图 12 相同视角下3个模型的观测图像Fig. 12 Observation images of three models in the same perspective
(2) 存在噪声情况下的相似度测量。这一部分检验了存在噪声情况下本文算法的相似度测量性能。通过将高斯白噪声添加到原始仿真图像中,可以获得含噪声的图像。将信噪比(SNR)水平设置为{40, 30, 20, 10, 5, 0, —10, —15, —20} dB,其中信噪比的定义为
其中, r( w,h)代 表SAR图像的频域数据, σ2为噪声方差。图13显示了slicy目标在某些噪声下的图像。图14给出了在不同噪声水平下的相似度。从图14中可以看出当SNR超过—10 dB时,相似度保持在较高水平,这验证了所提出的相似度测量方法对噪声的有效性和鲁棒性。
(3) 存在遮挡情况下的相似度测量。本节通过实验检验了存在遮挡情况下本文算法的相似度测量性能。通过丢弃在 θ = 30°和 φ=90°下观测图像中的一些散射体,模拟得到了被遮挡的SAR图像。如图15所示的相似度测量结果,当少于两个散射体(总共9个散射体)被遮挡时(剩余散射体的能量为41.40%),相似度仍能维持在很高的水平。但是,当丢弃3个或更多散射体时(剩余能量少于23.53%),相似度急剧下降。从图15结果说明,即使遮挡了总图像能量的58.60%,所提相似度测量方法仍能很好地发挥作用。
6 结束语
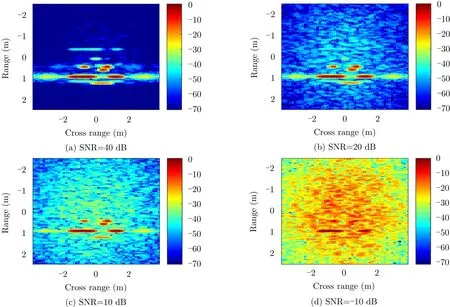
图 13 Slicy目标在不同信噪比下的仿真图像Fig. 13 The simulated images of the slicy target under different SNR
本文提出了一种基于3D-PEPM的SAR目标物理可解释的识别方法。在此方法中,目标被视为多个散射体的组合,并且其先验信息被编码在3D-PEPM中。目标识别任务是通过测量3D-PEPM和2D SAR数据之间的相似度完成的。在3D-PEPM模型的指导下,这种相似度的测量更具针对性并且有较强的抵抗噪声干扰的能力。而且在散射体层面的相似度测量方法中,即使在观测图像中未发现一些散射体,也可以可靠地完成相似度的测量。另外,基于相似度测量的结果,可以通过散射体对之间的对应关系获得目标组成部分的信息,这有助于对目标进行理解和推理。论文采用了简易坦克的仿真数据验证了该方法的有效性和鲁棒性。由于数据保密问题,我们在实际SAR载荷获取的实际目标数据上的方法有效性验证结果并未展示。
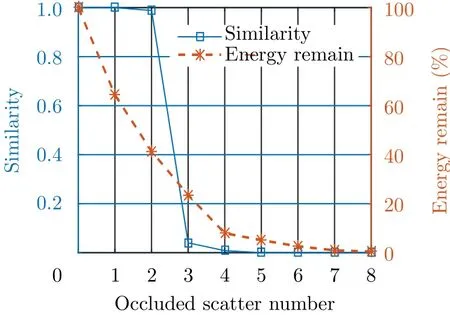
图 15 散射体遮挡下的相似度测量性能Fig. 15 Performance of similarity measurement under scatterer occlusion
