基于CKF的半潜平台压载舱液位估算法
2020-09-05洪昌盛周凯贤陈伶翔
洪昌盛,周凯贤,陈伶翔
(招商局重工(江苏)有限公司,江苏 南通 226100)
0 引言
压载系统是半潜式起重拆解平台实现姿态调整的主要系统[1],直接影响其浮态[2],为半潜船的起重、打捞、开采等作业提供支持[3]。半潜船在起吊过程中会产生巨大的倾覆力矩,为了平衡这个力矩,就需要短时间内完成压载水的快速压排载[4],为此,一般会为半潜式起重拆解平台配备快速压载系统。该系统由空压机、压缩空气管路和快速压载舱室等组成。快速压载舱的液位值是船舶压载系统的一个重要参数,液位值直接反应了压载舱的水量,因而液位测量系统是船舶系统中的一个重要组成部分。压载系统根据液位值自动调节压载水的进出,使得船舶运行在一个相对稳定和安全的状态[5]。由于船舶在海上不是静止的,并且任何传感器的测量值都存在噪声,因此液位计测量输出的液位也是动态变化的,并且测量结果容易受到外界干扰[6]。针对这个问题,本文提出基于容积卡尔曼滤波[7-8]的估计算法,对液位计测量值进行滤波,以获得稳定的输出。
1 运动方程和量测方程
1.1 运动方程
本文以舱内液位或气压的真实变换状态建立运动方程:
xk=f(xk-1)+Γwk-1
(1)
式中:xk为k时刻下舱室状态的真实值;f(xk-1)为k-1时刻的真实值对k时刻的预测;wk-1为k-1时刻的系统过程噪声;Γ为系统过程噪声的系数矩阵。
空气压载排载方式中,运动方程中的f(xk-1)的映射关系可以表示为:
(2)

(3)
(4)
(5)
(6)
(7)
(8)
(9)
式(3)~ 式(9)中:N为排水管数量;r为排水管半径,r=0.495 m;Δt为时间计算步长,Δt=1 s;QAir为每秒空气流量,等于空气压缩机流量(4.661 m3/s)与空气密度(1.204 kg/m3)的乘积;TAir为空气温度,TAir=293 K;RAir为空气系数,RAir=287.05 J/(kg·K);Ppri为舱内初始压力,Ppri=101 272 Pa;PAtom为标准大气压;ρ为海水密度。
1.2 量测方程
以传感器的测量数据建立量测方程:
zk=Hxk-1+vk-1
(10)
式中:zk为k时刻下液位或气压的测量值;H为量测值与真实值之间的映射关系;vk-1为量测噪声值。
2 容积卡尔曼滤波算法
容积卡尔曼滤波的核心思想是利用三阶容积积分原理计算函数f(x)的加权高斯积分,具体步骤[7-8]包括时间更新和量测更新。
2.1 时间更新
(11)
(12)
(13)
(14)
(15)
(16)
2.2 量测更新
(17)
(18)
Zi,k|k-1=HXi,k|k-1
(19)
(20)
(21)
(22)
Wk=Pxz,k|k-1(Pzz,k|k-1)-1
(23)
(24)
(25)

3 仿真实验
3.1 仿真条件
本文的研究对象为招商重工(江苏)有限公司建造的CM-163半潜式起重拆解平台。其总体示意图见图1,立柱压载舱布置见图2。
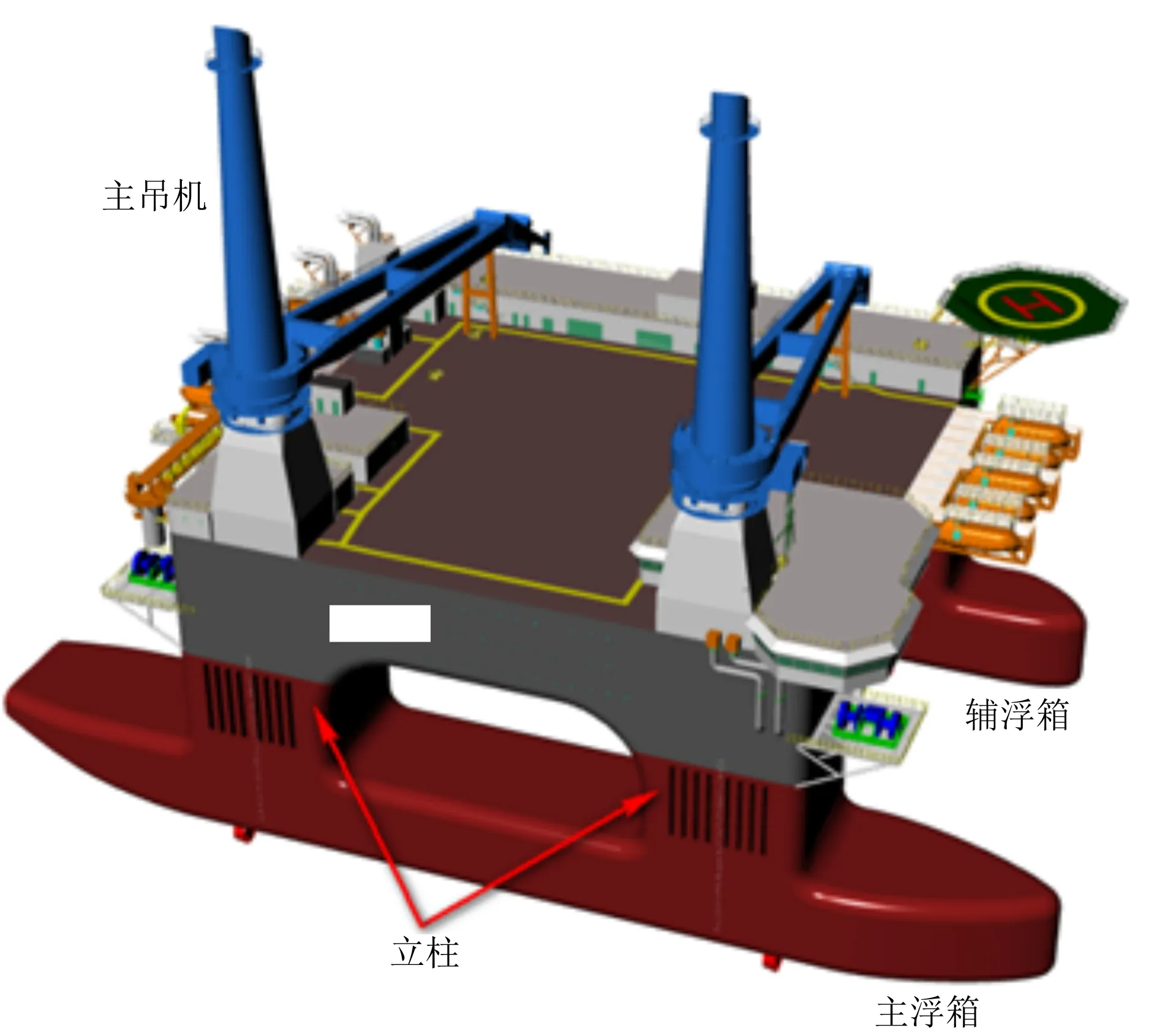
图1 CM-163半潜式起重拆解平台总体示意图

图2 立柱压载舱布置图
针对平台0~4 000 kN起吊时的立柱压载舱排载过程的参数变化情况,设计了2个仿真算例。仿真条件为:
算例1:0~4 000 kN起吊时 CSBT_MP_1舱室,舱室总容积为2 252.3 m3;排出水体积占总舱室容积的11%;舱内温度为293 K;外界水位距离舱底12 m;排水管数量为2,半径为0.495 m;空气压缩机流量为16 780 m3/h;舱内初始气压为101 272 Pa;初始液位高度为6.3 m;舱内初始水量为994.81 t。
算例2:0~4 000 kN起吊时CSBT_MP_2舱室,舱室总容积为2 249 m3,排出水体积占总舱室容积的6%;舱内温度为293 K,外界水位距离舱底12 m;排水管数量为2,半径为0.495 m;空气压缩机流量为16 780 m3/h;舱内初始气压为101 272 Pa,初始液位高度为8.7 m;舱内初始水量为1 394.38 t。
在上述条件下,使用液位传感器监测舱内液位状态。对传感器的测量值进行CKF滤波,将得到的滤波结果与原始测量结果进行比较。蒙特卡罗仿真次数为200次。
3.2 仿真结果与分析
仿真算例的结果见图3~图4和表1,其中:k时刻下传感器的测量值误差Ek,M和CKF滤波值误差Ek,CKF分别为:
Ek,M=|zk-xk|
(26)
(27)

表1 水位误差平均值 单位:10-3 m
由图3~图4和表1可以看出,基于容积卡尔曼滤波的液位估算法的滤波值的误差明显小于测量值误差,经过滤波后的误差约为直接测量误差的12.6%~13.1%。由于不同工况下对应的舱室排载水量的要求不一样,故采样次数有所不同。采样次数越多,则可以完成更多次数的滤波,有利于提高液位估计精度。
4 结语
液位测量系统是压载系统的重要组成部分,对液位进行精确估计至关重要,然而液位估计易受到外界干扰。本文提出了基于容积卡尔曼滤波的液位估算法,通过容积卡尔曼滤波减小测量误差,使液位计输出结果更为稳定。得到更精确、更可靠的液位数据有助于提高压载系统的工作性能,降低半潜式起重拆解平台姿态调整过程中由于液位值不精确带来的浮态影响问题,具有一定的工程应用价值。
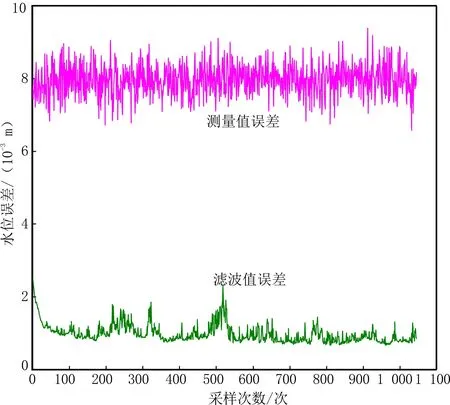
图3 算例1的水位误差图
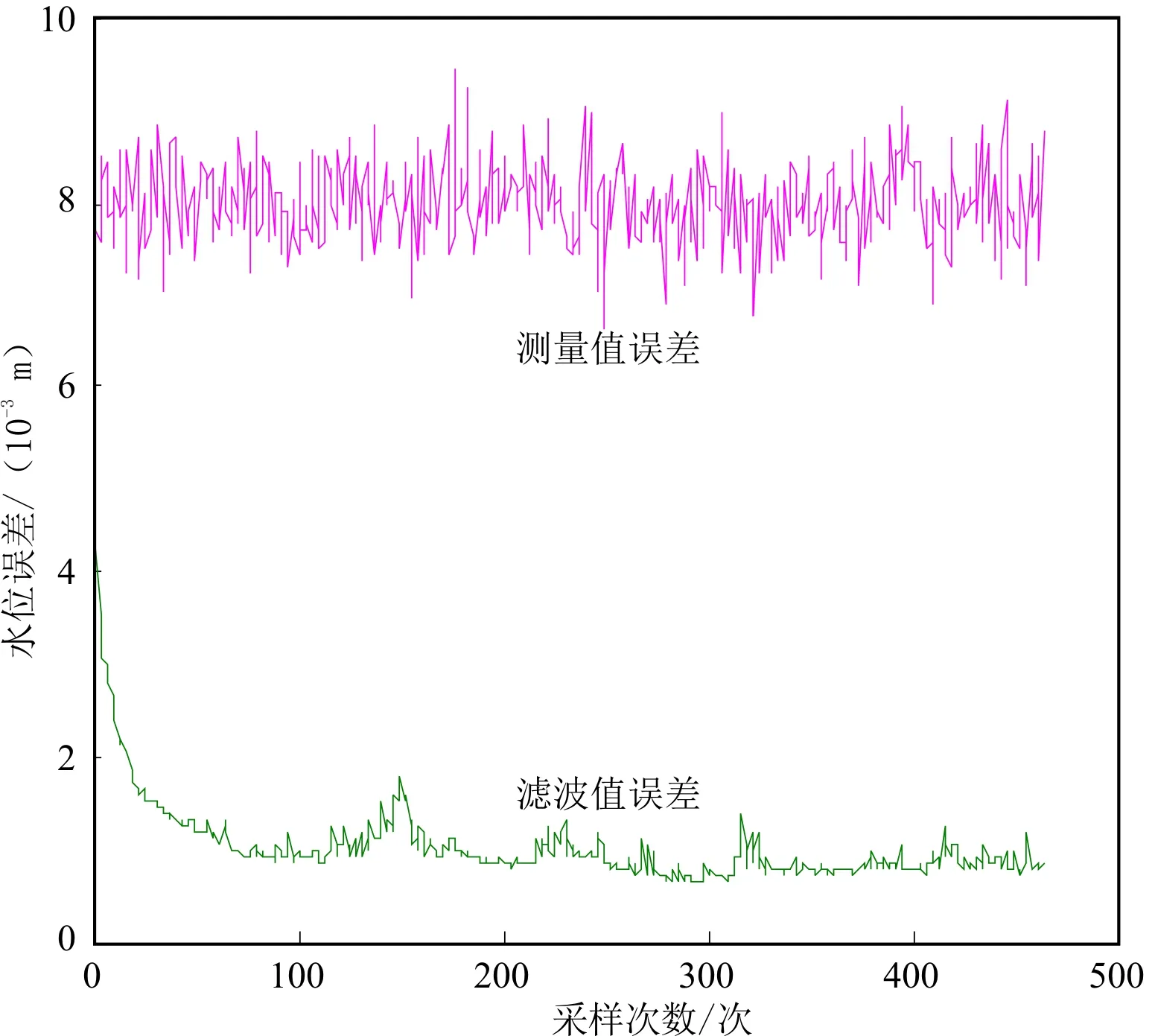
图4 算例2的水位误差