一种用于水下检测的仿生机器鱼
2020-09-04何建辉李志军汤明新赵江林曾伟豪
何建辉 李志军 汤明新* 赵江林 曾伟豪
(广东海洋大学机械与动力工程学院,广东 湛江524088)
随着科学的发展,各行各业的工作逐渐开始被机器人所取代,水下作业也一样。仿生机器鱼也是作为水下机器人的一种,其体积相对一般水下机器较小,而且能够自由地运动,耗能低,续航能力强,能够与上位机实现通讯等优点,能够在水下实现探测、水环境检测等功能[1]。对于仿生机器鱼的运动控制,由于水下环境具有复杂以及液体的扰动等原因,实现仿生鱼的自由运动控制也是相对复杂的。根据实验数据分析,在巡游鱼体前身部位始终产生一定的阻力,鱼身的中后部也可以产生少量的推力,但是尾鳍部分始终产生相对较大的推力。[2]仿生鱼的运动激振源如果靠近仿生鱼的尾部,其游动的效果会越好,也满足一般鱼类的游动特性。[3]因此,在鱼的尾部,我们设计为多节舵机组合型结构,通过舵机的联合摆动,实现仿生鱼的正常行走以及转弯。通过与重心调节机构相配合来实现对仿生鱼的上浮下潜。该仿生鱼搭载着WIFI 模块,用户利用手机APP 或者电脑PC 端与该WIFI 模块的局域网相连,就可以完成相应的数据传输以及控制。
1 仿生鱼的主要功能实现分析
本发明主要用于实现水下探测、水环境检测等功能,该功能主要是利用摄像头模块以及一些的水质监测传感器配合实现。接该仿生鱼搭载着WIFI 模块,可以把相应的视频数据或者检测数据传输给用户,同时接收上位机的运动控制指令来完成相应的运动。鱼的相应运动主要是利用鱼尾、鱼鳍与重心调节机构配合来实现。仿生鱼的胸鳍与尾鳍的摆动都是由舵机的转动来提供扭矩来实现,而且舵机是控制仿生机器鱼实现运动的工具,有利于提高其运动控制的稳定性能[4]。
2 仿生鱼的结构组成及主要部件分析
2.1 仿生鱼的总体结构设计
该仿生鱼由鱼头、鱼身、胸鳍、鱼尾、尾鳍组成(如图1 所示),鱼的外壳利用进口树脂3D 打印而成。在鱼头部分搭载着避障传感器、照明灯以及摄像头模块等,其他电子元器件以及供电元件装在密封室。而鱼尾部分则使用了多节舵机组合机构,它与上浮下潜机构、胸鳍相结合,完成仿生鱼的各种类型的运动。而鱼尾部分则使用了柔性材料,使鱼尾在水下游动的过程中,一方面减少摆动的阻力,使其运动具有类似于鱼类一样的连贯性。
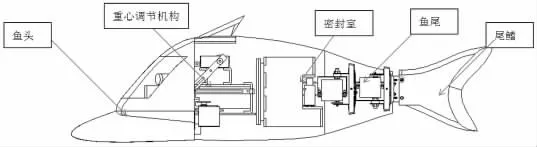
图1
2.2 主要运动部件分析
2.2.1 尾部结构分析
尾部的动力由三个舵机来提供(如图2 所示),通过与三节鱼尾和转动轴和轴承相互配合,给仿生鱼尾的摆动添加了一个自由度。一号舵机给回转轴提供回转动力,使得鱼尾按照设计者的给出的角度进行转动,二三号舵机则使鱼尾提供摆动的动力,相互结合使得仿生鱼在空间上能够实现多方向的自由运动。
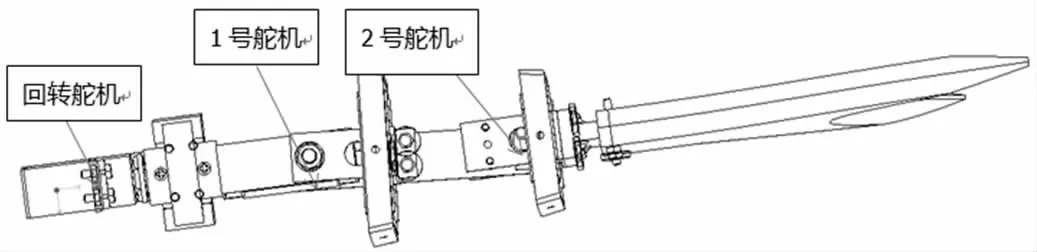

图2
2.2.2 重心调节机构分析
该重心调节机构利用了曲柄滑块机构(如图3 所示),利用舵机的转动输出提供转动的扭矩,使得摆杆进行转动,在平行导轨的作用下,使中间的重块在仿生鱼的内部实现来回移动,从而改变重心的位置,该重物用黄铜制作,其它位置的固定架用不锈钢来定制,在一定程度上,在保证该结构的稳定性之外,防止其在水下出现腐蚀速度过快的现象。该结构与尾部结构的运动相互配合,实现鱼的上浮下潜。
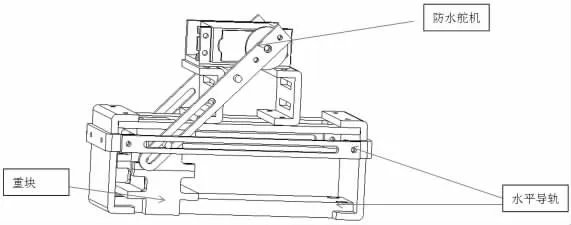
图3
3 控制端的设计
3.1 仿生鱼控制检测系统的组成
该仿生鱼的控制系统主要实现以下功能,其中包括定位、水下探测、水环境检测、自动避障等功能。控制系统以stm32f407单片机为核心,实现运动控制,对传感器收集的数据进行分析并传输以及数据筛选等功能。在正常运行中,利用姿态传感器,实时检测仿生鱼的状态信息,一方面可以检测仿生鱼是否出现翻转等现象,其次可以检测仿生鱼目前的运动是否与控制要求的运动相一致。避障传感器利用红外传感器,该避障功能可以防止仿生鱼在自动巡航的过程中与障碍物相撞。该舵机控制板主要用来控制胸鳍和尾鳍舵机的联合运动,实现鱼的正常运动。
3.2 运动控制的实现
对于鱼的运动控制,本论文则利用仿生鱼搭载的WIFI 模块利用WIFI 通信来接收上位机发送的运动控制指令,经过CPU 算法处理,把这些数据指令发送给舵机控制板,从而实现对胸鳍以及尾鳍部分舵机的组合运动。同时,该仿生鱼在自动续航的过程中,利用姿态传感器以及红外传感器来实现对运动方式的转变以及运动方向的更换,同时保证仿生鱼的姿态平衡,并实现水下避障等功能。
3.3 水环境检测的实现
该仿生鱼在鱼头部分安装了摄像头以及探测灯,而本论文使用了WIFI 摄像头模块,摄像头收集的实时视频可以通过WFI 模块经过WIFI 通信直接传输给上位机,在一定程度上减少STM32 的运行任务量,从而提高CPU 的处理速度。对于水环境的检测,我们利用了浑浊度传感器、温度传感器、含氧量传感器以及PH 传感器等来检测水环境污染标准的一些参数值,这些传感器收集的数据在STM32 中经过数据处理,经过WIFI 模块把这些数据直接传输给上位机(如图6 所示),让用户直接观看。
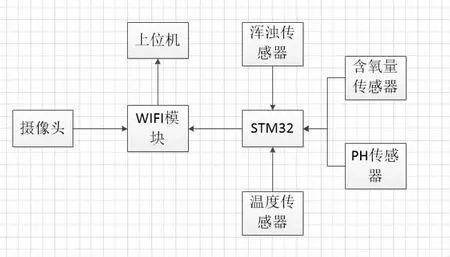
图4
4 结论
4.1 本论文研究了一种能实现水环境检测以及监测的仿生鱼,面对水下作业存在的问题提供了一定的解决方案,从而减少水下作业的劳动成本,而且本发明对于水产养殖业的发展也也有重要的意义。[5]
4.2 该仿生鱼结构在实现运动方面设计了多节舵机组合型的鱼尾,通过与中心调节机构与胸鳍的结合,从而保证鱼的正常运动,达到了与正常鱼的运动方式相一致的设计,也同时丰富了仿生学相应的研究内容。
4.3 在运动控制方面,在人工控制的前提下,添加了姿态传感器以及避障传感器,保证仿生鱼在水下运动的稳定性,同时防止与障碍物相碰,在一定程度上,提高了该产品的耐用性。
