一种军用雷达目标回波仿真系统的设计
2020-09-04单显明
单显明,谢 恺,王 锐
(1.沈阳工学院信息与控制学院,抚顺 113122;2.陆军炮兵防空兵学院兵器工程系,合肥 230031)
炮位侦察校射雷达是现代炮兵雷达的主要类型之一,是保障炮兵全天候、全天时获取战场情报信息不可或缺的重要侦察装备[1]。由于炮位侦察校射雷达是利用捕获飞行中的弹丸数据,来确定敌隐蔽发射中的炮位以及我方炮兵炸点数据。这样在非实弹射击的情况下,因无目标环境就无法进行雷达的侦察与校射作业训练,从而使正常训练课目难以开展,日常训练效果无法满足训练要求,极大地制约了新装备战斗力的生成。
为解决这些问题,研究如何产生逼真的雷达回波信号是十分必要的。国外对该领域研究比较早,例如,美国休斯公司曾专门为AN/TPQ-37炮位侦察校射雷达研制了弹道目标模拟器,欧洲的COBRA雷达也有专用的弹道目标模拟器,模拟弹道目标的角度位置变化,通过数字信号处理,模拟目标的距离位置变化及径向速度的变化,解决无目标保障环境下的雷达训练问题。
现代雷达频带宽、抗干扰和自适应等特点,给雷达信号的产生与模拟带来新的挑战[2]。中国研究人员针对不同型号不同功能的雷达,根据军事训练的实际需要,开发了不同的雷达模拟训练器[3-5]。文献[6]为解决雷达信号处理机研制过程中缺乏作战场景和回波输入的问题, 利用图形处理器(GPU) 处理平台实时产生雷达信号,实现了弹道导弹探测雷达模拟器。近几年,中国没有关于采用空间电波注入方式的炮位侦察校射雷达回波仿真装置内容相关的文献可查,对该领域的研究属空白阶段。
目前雷达模拟器的设计方案主要有3种:①全软件化雷达模拟器仿真[7-8];②实装雷达显示器和雷达信号生成器板相结合的全硬件仿真[9-10];③实装雷达显示器与计算机雷达信号生成系统相结合的半实物仿真[11-12]。
以方案③为基础,结合炮位侦察校射雷达的特点,拟采取空间电波注入的方式,首次实现某型军用雷达日常训练中的弹道回波信号仿真,为雷达训练提供真实的弹道模拟目标。
1 系统硬件组成
系统由遥控终端、中频信号处理、射频收发组件、频率综合器、电子开关和阵列天线组成,其中阵列天线安装在升降支撑结构上。系统组成如图1所示。
系统硬件实物如图2所示,主要包括收发处理机柜和阵列天线两个部分。收发处理机柜包括上、下变频组件、信号处理和遥控单元。收发处理单元的射频插座、控制插座用于接入电子开关阵的信号,遥控信号输入插座与遥控天线电缆连接。

图1 系统组成Fig.1 System composition

图2 系统硬件组成Fig.2 Hardware composition of system
阵列天线通过支撑机构安装在天线升降机构中,共有48个天线单元,每个线阵16个天线单元,天线单元分为上列馈、中列馈和下列馈。每个列馈高1.6 m,天线阵列总长4.8 m,由天线单元阵、微波开关和反射面组成。
2 系统工作原理
军用雷达工作在S波段,受保密限制,无法公布雷达的具体工作频率。由于雷达搜索波束仰角为2°,跟踪波束范围为2°~8°,所以仿真系统与雷达之间的距离为120 m,输出辐射功率为-50~10 dBm,采用1.5 m高基座及合适的高地,确保雷达波束能覆盖仿真系统的辐射单元。模拟弹道目标的仰角为2°~4°,目标距离为15~30 km,目标的多普勒频率为0~25 kHz,
系统工作原理如图3所示。工作时,首先根据雷达工作频率,设置仿真系统的接收及发射频率,然后执行系统标定,将雷达望远镜对准天线的第一个单元,得到第一个单元相对雷达的方位、仰角和距离,之后计算各天线单元的斜距和仰角,存储各单元的方位、仰角、斜距。

图3 系统工作原理Fig.3 Working principle of system
接收天线接收雷达的射频信号,经接收前端处理后进行下变频,变为信号处理用的中频信号,中频信号处理机将目标回波信号的延迟信息和多普勒信息叠加在接收的雷达中频信号上,再经上变频电路将中频信号变为雷达辐射的射频信号,由目标轨迹对应的仰角位置的天线单元将信号辐射出去。
信号处理控制收发开关工作在收状态或发状态。启动时,射频组件的收发开关工作在收状态,检测到雷达信号后,控制射频组件的收发开关工作在发状态。信号处理单元对接收的中频信号进行相位计算即可得到目标的多普勒频率。
3 软件总体设计
3.1 软件总体组成
软件总体组成如图4所示,主要包括主控软件和射频信号实时控制软件。主控软件为上位机软件,运行在个人电脑(PC)及其兼容机上,采用串行口RS485远距离连接模拟器,用于设置模拟器状态、弹道模拟器各项参数及操作,通过遥控终端发送至信号处理单元。弹道数据产生模块主要依据给定射角、初速度、弹丸参数及模拟器参数等,而不考虑方位上的信息,产生俯仰上在模拟器范围内的弹道数据,输出某一时刻弹道的速度、距离、喇叭位置供模拟器调用。
下位机为射频信号实时控制软件,主要完成远程通信、设置射频收发模块频率和衰减值、目标信号处理模块距离和速度值、功率测量模块工作模式和自校准功能、显示模块工作状态值和读取功率测量模块的幅度测量值和工作状态值等功能,各模块间采用串口通信,射频信号实时控制软件采用嵌入式单片机,嵌入式C语言编程,Keil开发环境。

图4 软件总体组成Fig.4 Overall composition of software

图5 遥控终端软件界面Fig.5 Remote control terminal software interface
3.2 主控软件
主控软件模块界面如图5所示。打开软件模块时会向遥控终端发送握手信号,收、发指示灯显示软件通信状态,若指示灯为绿色并交替闪烁则表示握手成功。
通过界面可设置频率、速度、距离、输入衰减、输出衰减、幅度检测工作模式、自检脉冲参数、轨迹点参数(速度、距离、喇叭位置)、轨迹运动、轨迹停止、喇叭阵列工作模式、接收脉冲展宽及等待参数等功能。
操作界面右侧为运动目标数据输入区域,在模拟器工作时读取目标运动轨迹文件,运动目标数据显示在这个区域。点击右方“读文件”,选择校射数据文件,校射数据文件在图5右边表格中显示。表格第1列为目标对应于某一时刻的速度,第2列为目标距离,第3列为打开的喇叭位置。校射数据目标相对雷达的速度为正值,距离逐渐变大,喇叭位置从48至1变化。如选择侦察数据,则目标相对雷达的速度为负值,距离逐渐变小,喇叭位置从1至48变化。
模拟器正常工作,系统软件界面有通讯指示灯指示收发状态,当指示灯不停闪烁时,表明正在传输数据,等待正常闪烁时(2~3 s间隔闪烁),即可进行其他的操作。模拟器自动检测接收信号的电平并显示在参考值的显示框内。
3.3 射频信号实时控制软件
射频信号实时控制软件组成如图6所示,包括串口通信模块、功率测量模块、显示模块、目标信号处理模块和射频收发模块等部分。射频信号实时控制软件运行流程如图7所示。
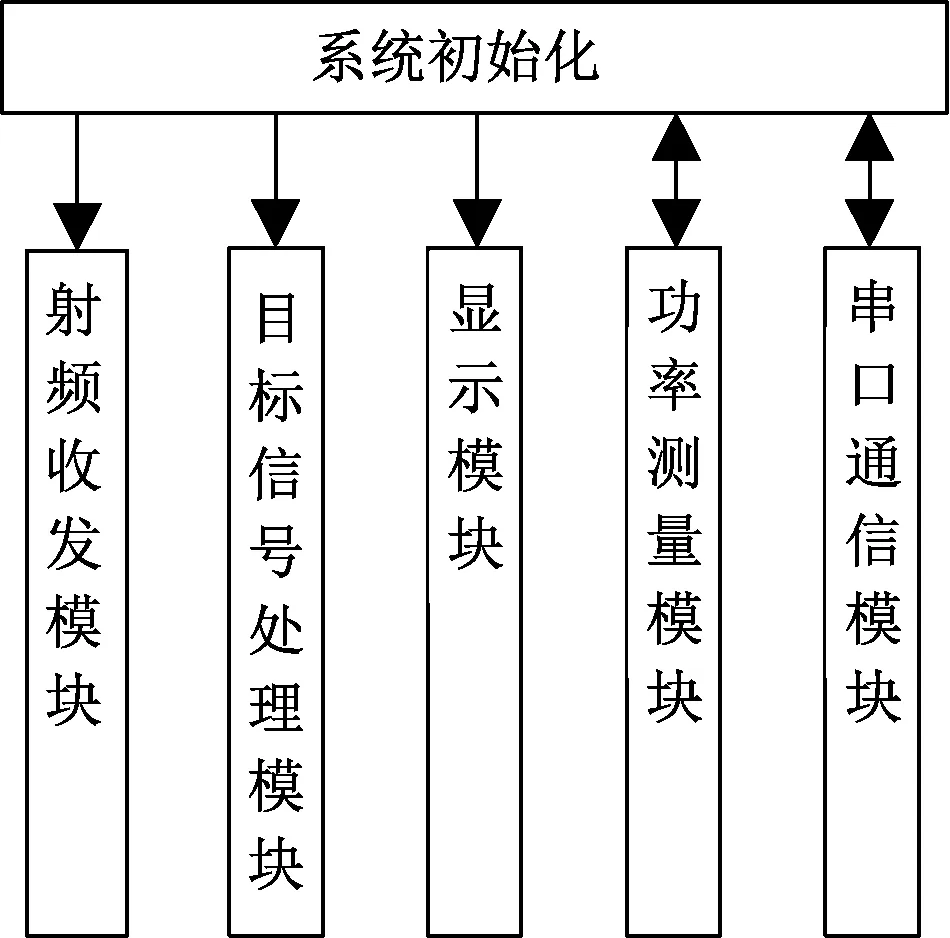
图6 控制模块组成Fig.6 Control module composition
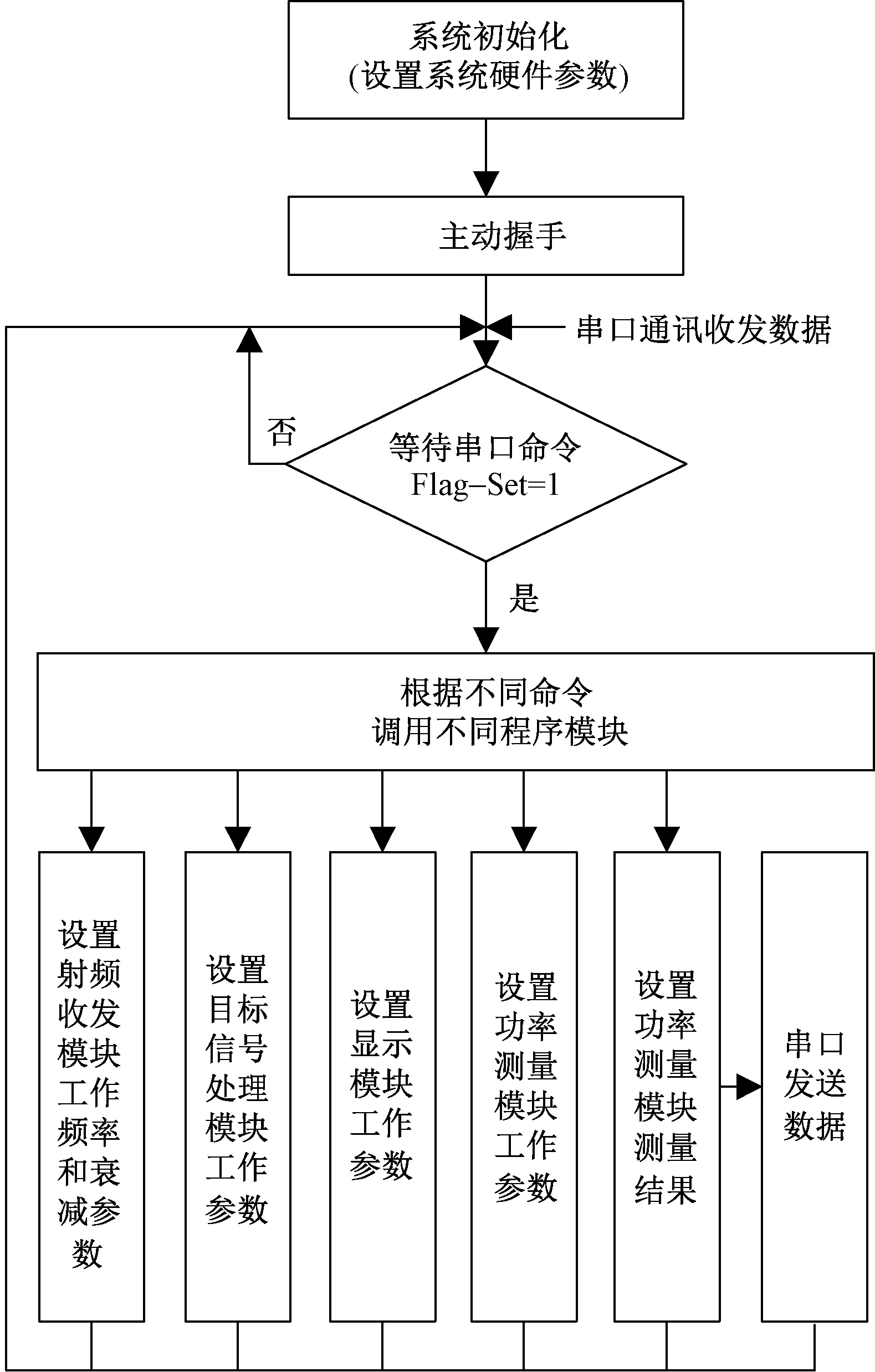
图7 控制模块软件运行流程Fig.7 Operation process of control module software
4 系统验证
系统采用两种方式验证。
第一种方式为检验固定单元、固定距离的回波信号,对所有单元分别进行了实验。距离为15~30 km,多普勒频率最大值为25 kHz,固定距离为15、20 km的弹道回波在雷达实装B型显示器显示画面如图8所示。

图8 固定距离的弹道目标Fig.8 Ballistic target with a fixed distance
第二种方式为检验弹道目标数据。当雷达为侦察方式时,模拟弹道目标的回波信号,共生成20条弹道数据,以下仅列出前3条雷达搜索、跟踪、外推的部分结果数据,其中:X为横坐标;Y为纵坐标;H为高程;T为波束编号。
雷达搜索数据:
X=5 076 262.500,Y=345 416.281,H=210.00,波束编号Tn=0,2,32,118。
T=0.163 629,A=-0.001 099,E=0.017 672,R=15 025.380 859,D1=0.005 370,T1=1.578 211,RV=1.634 416;
T=0.327 253A=-0.000 956,E=0.018 496,R=14 990.226 563,D1=0.005 306,T1=1.578 084,RV=1.634 416;
T=0.524 464,A=-0.001 090,E=0.019 725,R=14 953.957 031,D1=0.005 306,T1=1.578 126,RV=1.634 416。
雷达跟踪数据:
X=5 076 245.000,Y=345 426.344,H=210.00,
波束编号Tn=2,3,80。
T=0.163 521,A=-0.002 366,E=0.017 559,R=15 021.681 641,D1=0.005 327,T1=1.578 041,RV=1.634 416;
T=0.327 145,A=-0.001 843,E=0.018 870,R=14 986.070 313,D1=0.005 284,T1=1.578 169,RV=1.634 416;
T=0.524 464,A=-0.001 616,E=0.020 061,R=14 950.177 734,D1=0.005 348,T1=1.578 169,RV=1.634 416。
雷达外推数据:
X=5 076 320.000,Y=345 460.781,H=210.00,波束编号Tn=4,8,33,16。
T=0.165 131,A=0.003 211,E=0.017 995,R=15 011.336 914,D1=0.005 263,T1=1.578 169,RV=1.634 416;
T=0.328 762,A=0.002 490,E=0.019 686,R=14 984.359 375,D1=0.005 284,T1=1.578 211,RV=1.634 416;
T=0.524 464,A=0.001 064,E=0.020 881,R=14 947.599 609,D1=0.005 348,T1=1.578 254,RV=1.634 416。
通过各项实验表明,系统能够生成真实的雷达侦察或校射弹道回波信号,回波距离精度为1.5 m,满足各项指标要求,保障了雷达侦察或校射作业的需求。
5 结论
军用雷达目标回波仿真系统采用阵列天线模拟弹道目标的空间位置变化,用应答方式产生目标的回波信号,首次实现了某型军用雷达弹道目标的真实模拟,解决了雷达日常训练无实弹射击保障的训练难题。
