一种空地一体化实景三维建模方法
2020-09-03耿利川王忠丰史建东秦永志
耿利川,王忠丰,史建东,秦永志
(1.许昌学院,河南 许昌 461000;2.92493部队,辽宁 葫芦岛 125000;3.61206部队,北京 100042)
随着无人机、微型化倾斜摄影吊舱、三维重建等技术的成熟,无人机倾斜摄影技术因其低成本、高精度、高效率的特点,在应急测绘、城乡规划、不动产登记、三维城市建设以及环境应急等领域得到推广应用[1-3]。目前多数用户将关注于如何快速获取倾斜影像和快速生产实景三维模型,对实景三维模型的质量问题少有研究,导致目前实景三维模型质量参差不齐。随着实景三维模型在更多领域的普及应用,对三维模型的质量及精度要求更为严格,高精度、更逼真的实景三维模型成为众多应用领域的迫切需求。无人机倾斜摄影测量由于在数据采集过程中,近地面物体受树木、屋檐等遮挡物影响,导致对目标地物采集的几何信息和纹理信息不完整,使得实景三维模型出现模糊、拉花、破洞等现象,影响三维模型的质量和精度[4]。本文将无人机倾斜摄影测量和近景摄影测量优势相结合,对空地影像数据一体化采集的方法及三维重建中的关键技术进行了研究,提出一种切实可行的解决方法。
1 研究背景与技术路线
1.1 倾斜摄影测量
倾斜摄影测量通过飞行平台特别是无人机搭载多台影像传感器,从一个正射、四个倾斜五个不同的角度采集影像,能够快速、高效获取大范围建筑物顶面及侧面部分丰富的高分辨率纹理信息[5]。结合无人机集成的记录姿态位置信息的POS系统,通过三维模型生产软件,可快速高效地生成大范围的实景三维模型。相比传统的有人机摄影测量,大大提高了影像采集工作的效率,降低了人工成本,解决了有人机摄影测量存在的效率及成本问题。无人机倾斜摄影测量系统作为传统航空摄影测量的有力补充,不仅提升测绘应急保障服务能力,而且在构建数字中国、监测地理国情等方面也发挥着积极作用[6]。
1.2 近景摄影测量
近景摄影测量是摄影测量与遥感学科的一个分支,它通过摄影手段以确定地形以外目标的外形和运动形态[7]。传统的近景摄影测量所使用的相机分为量测摄像机和非量测摄像机,量测摄像机的光学畸变小,附有畸变插值,且可记录内方位元素和外方位元素。非量测相机多为普通照相机,成像质量一般。近年来,数字近景摄影测量快速发展,使用单反数码相机作为地面影像获取平台,可通过计算机自动完成空三测量解析原始影像的内方位元素及快速建立精密模型。近景摄影测量的优点在于能获取被测物体大量物理信息和几何信息[8]。
1.3 技术路线
根据模型精度要求规划制定飞行计划,通过无人机搭载倾斜摄影传感器获取空中倾斜影像,利用数字单反相机搭载定位差分模块,在地面近距离按照一定规则环绕拍摄目标地物,获取地面近景影像。将获取的影像数据进行整理及检查,进行预处理。将空中倾斜影像与地面近景影像联合进行平差计算,使空地影像位于同一空间参考坐标系下,解算影像曝光瞬间的外方位元素,获得融合之后的密集点云数据。根据空地一体化空三结果进行不规则三角网构建以及纹理贴图等工作,最终生成精细化的实景三维模型。本文技术路线如图1所示。

图1 技术路线
2 空地融合三维建模实验
2.1 实验区介绍
本文以许昌市许都公园许昌博物馆和许昌大剧院作为研究对象,两大建筑几何结构复杂,存在大屋檐等明显特征,是传统倾斜摄影测量较难建模的类型。实验区影像图如图2所示。

图2 实验区卫星影像
2.2 实验区影像数据采集
本文实验倾斜摄影影像采用大疆精灵4 PRO无人机进行飞行采集。由于该无人机系统为单镜头,为获取5个角度影像,规划了5个角度航线,4个45°倾斜视角和一个垂直视角。为了保证测区边缘地区精度符合要求,根据实际生产经验,航向重叠率设为80%,旁向重叠率设为70%。为了获取实验区完整纹理信息,航向和旁向范围外扩一个航高距离。实验共计拍摄1 016张倾斜影像。
地面近景影像采用单反相机索尼RX1RII拍摄,由于该相机拍摄影像不含位置信息,本实验将其集成了中海达后差分系统,在地面围绕建筑物拍摄一周,为保证足够的重叠率,建筑物各立面拍摄采用定点拍摄三个角度照片的方式采集影像,建筑物转角处每隔10°拍摄一张,保证各立面影像衔接适当。为了保证相同的分辨率,按照同样的距离拍摄目标。本实验地面拍摄1 349张影像。
由于建筑物过高,航拍影像与地面近景影像拍摄距离以及分辨率有很大差异,通常空三处理中只采用了一种数据源所拍摄的照片,两者的点云数据有极大的概率不能融合,本文在中间过渡高度设计了一条环绕航线,通过在该高度环绕拍摄一组像片,提高空地影像间的纵向重叠度,通过空三以及控制点辅助联合平差等处理流程,生产出空间参考系统统一、高密度融合点云数据。
2.3 精细化建模
本文采用ContextCapture实景三维建模软件进行空三、建模处理。该软件基于图形运算单元GPU的快速三维场景运算软件,可运算生成基于真实影像的超高密度点云,它能无需人工干预地从简单连续影像中生成逼真的三维场景模型[9]。模型的生产通过空地融合的密集点云构建出更精细的三角网模型,根据影像精确的空间位置信息,计算出各三角网格对应的影像关系,通过纹理映射选择高分辨率的影像进行贴图,从而得到实景三维模型。图3为空地融合后的空三加密成果。图4为建成的实际三维模型。

图3 空地融合后空三加密成果

图4 实景三维模型
2.4 精度分析
2.4.1 模型精度分析
本文利用6个控制点在实景三维模型中的坐标与RTK实测坐标之差进行对比分析,误差如表1所示,由于个别控制点处于模型边缘地带,模型质量不高,造成平面误差较大,但三维模型的平面坐标均方根误差均在5 cm之内,高程均方根误差在10 cm之内,根据《CH T 3007.1-2011 数字航空摄影测量测图规范》,该结果符合平原地区1:500地形图的测图误差小于0.1 m的标准。

表1 控制点坐标误差
2.4.2 模型质量分析
通过对试验区空地融合前后的点云及模型进行对比分析,密集点云数据和实景三维模型几何结构,经过空地融合质量均得到极大提升,建筑物的细部结构得到更好构建。
对比许昌博物馆的局部模型可见,在空地融合建模前,屋檐之下的点云密度极其稀疏,如图5(a)所示。构建的三角网结构分散,如图6(a)所示。

图5 空三加密点云数据对比

图6 三角网模型对比
经过纹理贴图之后,模型出现严重拉花、模糊甚至大面积破洞等现象,如图7(a)所示。经过空地融合之后,受遮挡的区域点云密度明显提升,构建的TIN模型结构更加密集细致,所生产的模型大大减轻了之前的拉花、破洞等现象,如图5(b)、图6(b)、图7(b)所示。局部细节对比,如图8所示。

图7 三维模型对比
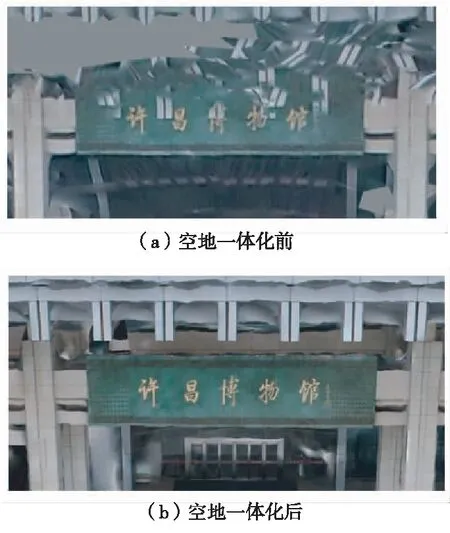
图8 模型局部细节对比
通过对空地融合前后模型的对比分析,发现在经过本文方法空地融合之后,实景三维模型的整体纹理丰富、色彩清晰。从模型的局部细节来看,几何结构更加清晰精细,墙面上的细节轮廓表现得更加突出。
3 结 论
本文以许昌市许都广场为研究对象,设计出了一种空地结合的实景三维建模方法,通过实验验证,得到该区域的精细化实景三维模型。与传统倾斜摄影方式相比,该方法获取的模型精细化程度更高,能够满足模型精度要求更高的应用需求。由于本文方法需要进行空地一体化影像采集,其中地面采集部分工作量较大,针对大范围精细建模的需求,如何提高时间效率还需进一步研究。
