城市轨道交通信号系统发展展望
2020-09-02邓红元
邓红元

摘 要:伴随着自主化城市轨道交通信号系统(以下简称“城轨信号系统”)技术的蓬勃发展与不断扩张的市场需求,城轨信号系统的发展到了临界点。如何在传承既有技术的基础上,探索下一代信号系统的发展,是行业中热议的焦点。文章从闭塞制式和系统架构 2 个角度出发,通过深入总结现状并结合相关专业前沿技术,探究城轨信号系统下一步的演进方向,提出系统智能化发展建议,以实现城轨信号系统“增效、降本、提智”的目标。
关键词:城市轨道交通;信号系统;闭塞制式;系统架构;CBTC;展望
中图分类号:U285.5
1 背景
信号系统是保障行车安全、提升运输效率的关键系统。目前,绝大多数城市的轨道交通系统均采用基于通信的列车自动控制系统(CBTC),该系统基于“挡墙”原理,根据前车的瞬间位置防护后续列车的安全,并实现列车自动运行、进路自动选排等自动化功能。
随着城市轨道交通列车控制系统自主化技术的不断成熟应用,中国铁路通信信号股份有限公司等自主化厂家,利用重庆市轨道交通互联互通CBTC系统示范应用项目,在中国城市轨道交通协会的指导下发布了《城市轨道交通 基于通信的列车运行控制系统(CBTC)互联互通系统规范》系列团体标准,逐渐统一了信号系统的需求、架构、功能分配及接口,促进城市轨道交通线路的建设从传统的单线独立建设、独立运营,向着网络化建设、网络化运营过渡。部分新建线路也在CBTC系统基础上引入了更多自动化、智能化的功能需求,使城轨信号系统向着全自动运行(FAO)方向发展。
纵观信号系统的发展脉络,其均以提高安全性、降低建设和维护成本、增加运输效率和提升自动化水平为出发点。目前CBTC系统的发展已经较为成熟,下一代信号系统能否在保障安全的基础上,进一步提升运输效率、降低建设和维护成本,并利用信息化技术使城轨信号系统更加智能化,实现“增效、降本、提智”的目标,值得深入探讨。
2 闭塞制式现状及演进
闭塞是保证前行列车和追踪列车之间保持一定距离运行的技术方法,而闭塞制式确定了安全防护机制和行车间隔。信号系统的发展长期以来都離不开闭塞制式这一主题。
2.1 闭塞制式现状
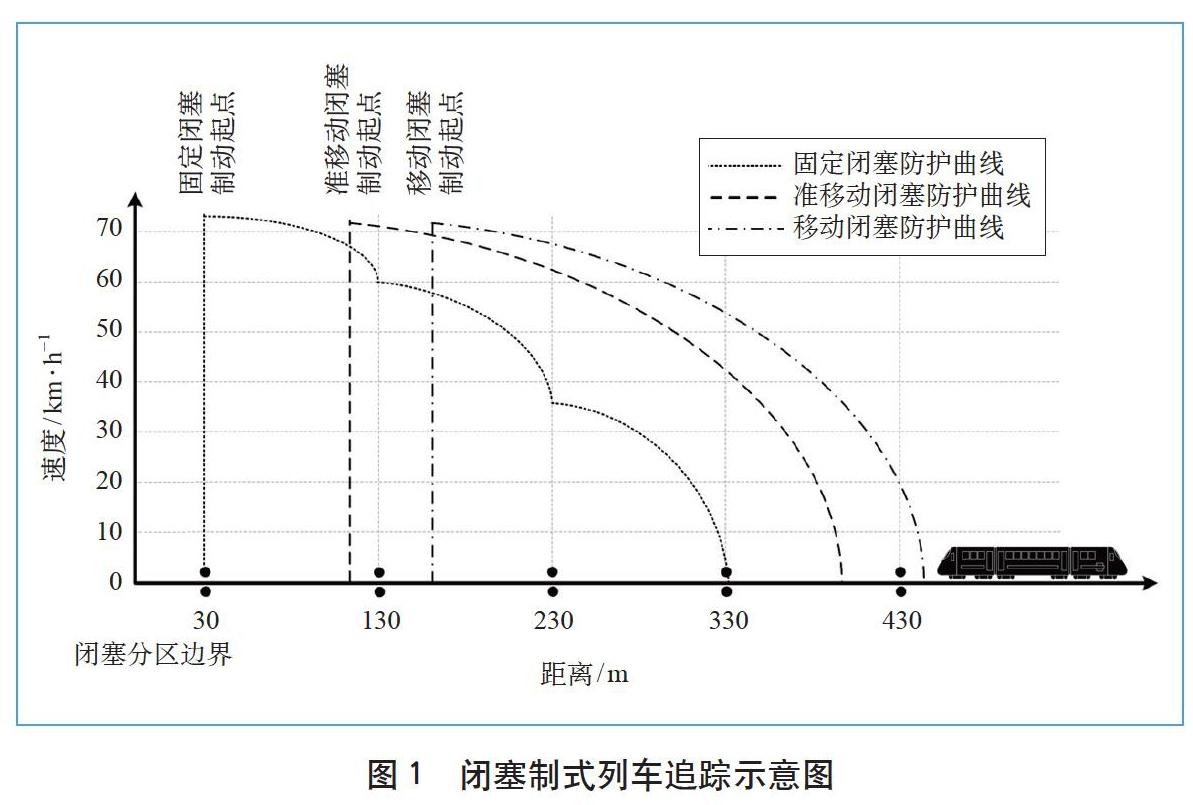
目前,CBTC系统采用的移动闭塞制式突破了固定闭塞分区的限制,通过车-地实时通信,动态地更新列车运行前方的危险点。从固定闭塞到准移动闭塞,再到移动闭塞,列车之间的追踪间隔逐渐缩小,如图1所示。
20世纪90年代中期以前,我国城市轨道交通主要采用固定闭塞系统,通常按照出口速度控制方式防护列车运行安全,其制动起点为当前车辆占用的闭塞分区终点,制动终点为前方列车占用闭塞分区后方的第一个区段入口,形成阶梯式分级速度控制曲线。
20世纪90年代中后期,准移动闭塞在国内的应用逐渐兴起。准移动闭塞制式较固定闭塞制式,列车增加了定位功能,车-地之间传输的信息更加丰富,因此,其制动起点根据当前列车的实际位置动态确定,制动终点为前方车辆占用闭塞分区后方的区段入口,并留有一定的余量,形成目标-距离速度控制曲线,最小行车间隔有了显著提升。
进入21世纪后,移动闭塞系统得到了大规模的应用,相较准移动闭塞,车-地间通信更加丰富,列车定位更加准确,其制动终点为前方车辆的尾部,并留有一定的余量,进一步缩短了最小行车间隔。
2.2 闭塞制式演进
移动闭塞是城市轨道交通当前最为成熟的闭塞制式,在移动闭塞制式的基础上,若能够进一步突破速度防护曲线对列车追踪间隔的限制,使正常运行的前后车之间的距离进一步缩短,将对提高线路运输效率、增强运输组织灵活性有着巨大的促进作用。通过借鉴以下相关行业的发展,本文将提供一种闭塞制式演进的可能。
在航空航天领域,天舟1号和天宫2号在太空实现高速下的对接,天宫2号的飞行轨道高度为350~400km,最低运行速度为28000km/h,对接直径约为2m。在对接过程中,天舟1号在距离为5000m、400m、120m和30m共4 个停泊点处减速调整。进入30 m间距后,天舟1 号和天宫2号之间的对接由系统自主判断,实现自动对接。
在车联网领域,沃尔沃公司研发的基于车-车协同的汽车车队运行模式,通过车端到车端(V2V)通信技术实现车和车之间的车队协同运输,即车辆根据运行需求可以动态地加入车队或者离开车队,配合自动驾驶功能实现智能化的高效运行组织。
目前,北京市轨道交通 12 号线拟采用物理接口实现列车之间的在线动态物理连挂、解编,可将2列4辆编组列车首尾连挂形成8辆编组列车,实现4 辆、8 辆编组列车同时在线混运。但物理编组需要列车在低于5 km/h的速度下对接,且存在反复连挂、解编机械连接致使部件磨损等问题。
以上3个案例为城市轨道交通闭塞制式的演进提供了启发:以传统基于位置的追踪模式为基础,实现基于速度的追踪模式和基于耦合的追踪模式,如图2所示。
图2中,CBTC-BL(Based Location)曲线为基于位置的后车追踪曲线,CBTC-BV(Based Velocity)曲线为基于速度的后车追踪曲线,CBTC-BC(Based Coupling)曲线为基于与前车耦合的后车追踪曲线。
CBTC-BV是在CBTC-BL模式的基础上,引入前车速度参数,实现前车与后车基于实时速度的追踪,以达到追踪的极限。CBTC-BC则是引入了车-车协同的理念,将前车与后车进行虚拟编组耦合形成车队,共同调度和运行,进一步达到缩短运行间隔、提高线路整体运输能力的目的,可在早晚高峰时便捷地实现列车组队以提升运能,在平峰时快速分离。在不降低运营密度的情况下,以短编组列车运行,打破运能与行车密度之间的关联关系,达到“增效”的目的,使乘客在出行方面获得更多的满足感。
在CBTC-BC模式下,具有相同运行方向的2列列车可以动态耦合,在遇到分岔点时,可逐步加大间距,按照不同的运行目的自主解耦独立运行。基于耦合的追踪模式打破了移动闭塞制式目前的追踪瓶颈,在传承的基础上实现了闭塞制式的进一步演进。由于系统保留了CBTC-BL曲线,因此在出现车与车之间通信异常、无法投入CBTC-BC时,仍可按照传统模式实现CBTC模式下的连续追踪。
3 系统架构现状及演进
3.1 系统架构现状
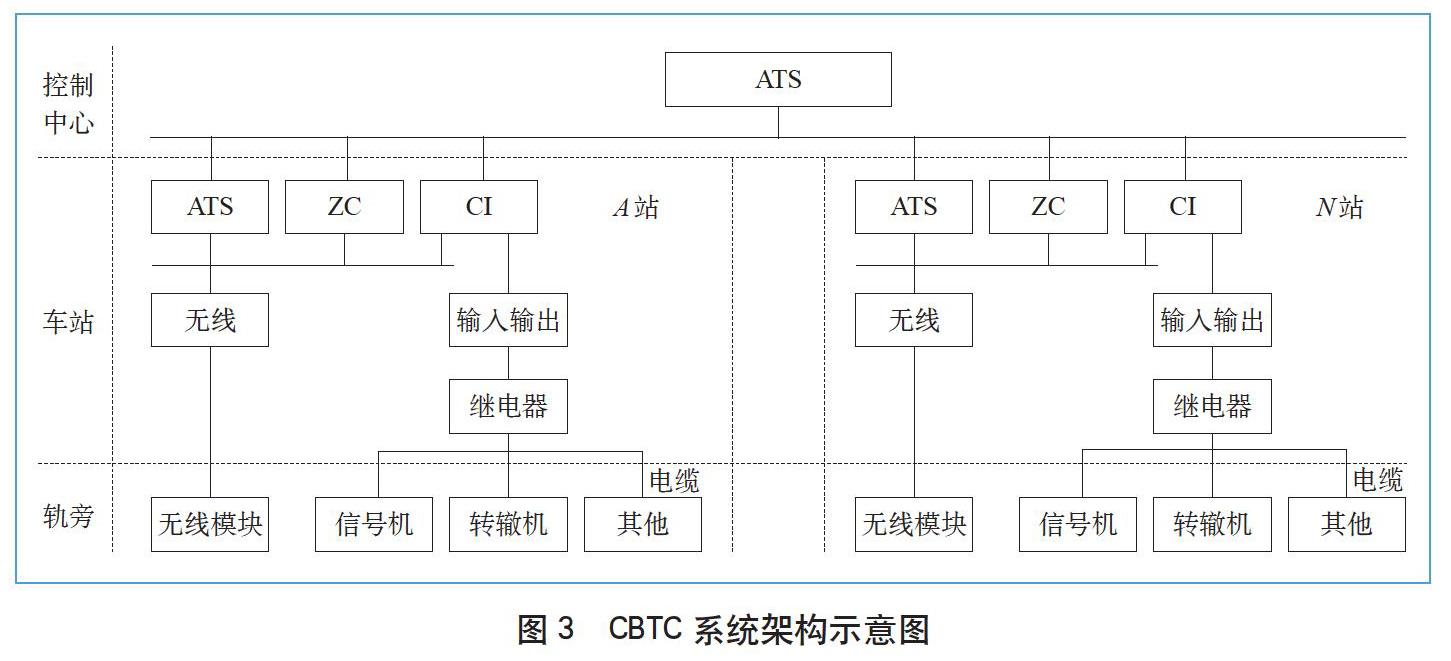
目前国内线路的系统架构主要包括控制中心、车站、轨旁和车载4个部分,本文围绕控制中心、车站、轨旁3 个架构进行优化研究,如图3所示。目前3个系统架构在一定程度上继承了国家铁路的发展,以计算机联锁(CI)为基础,逐步叠加了列车自动监控(ATS)与区域控制器(ZC)等设备,其中ATS承担行车指挥功能,ZC承担移动授权计算及列车管理功能。设备采用分布式部署方式,相互之间影响较小,设备维护相对分散。虽然这种系统架构的灵活度较高,但整合度低,不同子系统之间信息频繁交互,通信延时也大大增加。
同时,CI通过驱动采集继电器实现对轨旁设备的控制。在车站设备中,装设继电器的组合柜占用了大量的设备房面积,不利于后期信号系统的升级、改造;在工程建設阶段,继电电路的实现需要现场施工单位反复校核,确保配线正确,从而会延长建设工期;在运营维护中,继电电路发生故障后,排查及处置周期较长,给行车安全带来隐患。
此外,随着城市轨道交通自动化、智能化程度的不断提升,信号系统的架构不利于专业之间的信息共享,造成了信号专业的信息孤岛,因此系统架构可进一步进行整合与优化。
3.2 系统架构演进
3.2.1 轨旁设备控制数字化
目前信号系统采用集中控制的方式,室外设备通过线缆与室内连接,室内设备通常采用继电电路实现对室外设备的监控,由于线缆的物理局限性,使其在控制范围上受到限制,因此联锁设备必须在车站内按照区域进行设置。轨旁设备控制的数字化是通过电子执行单元替代传统的继电执行电路,实现联锁控制部分与执行部分在设置上的同址耦合关系,从而实现灵活部署:
(1)联锁控制部分既可分散设置,也可在控制中心或指定站集中化设置;
(2)联锁执行部分可根据需要分散设置于某几个车站,也可在室外区域集中设置。
以光纤网络代替传统的金属信号电缆,将基础设备通过电子执行单元在轨旁直接接入通用网络,从而对单个设备或一定区域内的多个设备进行控制,实现轨旁设备控制的数字化。
目前在国内项目中,采用电子执行单元替代传统继电执行电路的联锁系统主要由西门子、庞巴迪等外商提供核心技术。以中国通号为代表的自主化供货商已完成了相关研究,其成果已在路外应用,并正在积极向城轨领域推广,这将对大幅度降低建设成本、减少维护投入、缓解既有线改造难度产生深远的影响,也将为系统结构的演进提供技术支撑。
3.2.2 轨旁一体化控制系统
轨旁一体化控制系统是融合ZC与CI设备功能的安全控制系统。ZC与CI一体化设计,可优化2个设备之间的接口性能,减少系统的反应时间,具有更高的可用性及丰富灵活的运营支持功能,更有利于实现高效的列车控制,如图4所示。相比未进行一体化的系统,实时性将提高50%,设备整合也将进一步减少设备用房的空间需求。
轨旁一体化控制系统的研究已取得一定成果。2019 年5月21日,中国铁路总公司科信部会同工电部在北京组织召开了“列控联锁一体化系统”技术方案评审会,与会专家认为列控联锁一体化系统集成了列控中心和计算机联锁的全部功能,实现了轨旁设备的全电子控制,减少了设备数量和接口,符合技术发展趋势和电务专业的应用与维护需求。
由于轨旁一体化控制系统对硬件进行了整合,硬件成本进一步降低,维护设备的数量也进一步减少,系统处理的实时性得到进一步加强。在进一步降低成本的同时,由于系统内时延减少,进一步提升了系统在速度250km/h线路上的适应性。
3.2.3 系统结构灵活化
通过上述的系统优化,实现了全以太网化的控制模式。在硬件和计算能力满足的前提下,可以将车站设备进一步整合,即将轨旁一体化控制设备整合到一个车站或者集中设置在控制中心,同时将ATS系统车站设备与控制中心设备整合,从而在满足常规部署的同时可满足集中化部署的需求,如图5所示。
通过设备的整合,简化系统架构、充分分配功能、减少中间环节和设备间同步的复杂度是未来技术发展的主要特征,基于车-车通信的CBTC是该发展思路的一个分支。
3.2.4 系统功能智能化
城轨信号系统发展到今天,其自动化程度不断提升,但智能化程度尚待进一步探索和提升。目前城市轨道交通各线各专业的硬件资源均单独设置,形成了信息孤岛,不便于数据的整合与挖掘,那么未来各专业在面向单一业务的基础上,应逐步朝着集中化(面向标准化组件)、虚拟化(面向资源)、云计算(支撑决策和提供增值服务)方向发展。随着云计算和大数据等技术的不断发展,城市轨道交通业务也将朝着平台通用化、中心虚拟化、车站一体化方向延展。系统功能的智能化建立在信息化发展的基础上,充分挖掘“信息”价值,为调度、维护、乘客提供“智慧”服务。例如,信号系统会根据以往客流数据并动态感知,智能地调整列车运行密度:若线路上某一设备发生故障,在调度员不介入的情况下,信号系统根据运营和故障情况,结合应急策略生成对应的解决方案,智能地引导故障的排除及运营秩序的恢复,并根据平台、网络和基础设备的数据,在列车发生紧急制动后迅速判断出故障原因,无须事后逐项分析等;若在线路某区域发生了重大故障,系统可以高效地提供跨线路甚至跨路网的交通疏解方案。
4 结语
在《交通强国建设纲要》的指引下,城市轨道交通作为交通系统融合发展的关键环节,需要充分发挥自主化技术优势,以既有技术积累为基础,解放思想;在确保安全的基础上,将相关领域内的先进技术、理念、方案与城轨信号系统相互融合。从其历史发展规律及国外行业发展现状可知,闭塞制式和系统架构的演进是必然趋势,智慧城轨也在逐步落地生根,这就需要业主、厂商共同协作,在传承的基础上不断创新,以便实现城轨信号系统“增效、降本、提智”的目标。
