基于工业机器人与PLC的物料分拣教学实训平台设计
2020-09-02王德璋
王德璋
(新疆轻工职业技术学院,新疆 乌鲁木齐 830021)
随着科学技术的飞速发展,机电一体化技术的应用领域愈加广泛,为人们的工作与生活提供了极大的便捷。越来越多的机电一体化平台出现在学生的实习训练环节,通过实际教学实训来提升学生的能力与积累经验。当前,多数教学实训平台普遍存在一些缺点,如综合性较低且实现功能单一,无法有效满足学生的实训需求。基于此,文章将可编程逻辑控制器(Programmable Logic Controller,PLC)技术与工业机器人相结合,并且融合液压气动控制、传感器技术、PLC自动控制技术以及机电传动控制等方面的知识,针对教学实训平台进行设计与实验,以使学生的实训环节更加科学、合理,帮助学生拓展知识面,对现代化教学设备实践性与先进性的提升具有重要意义[1-2]。
1 教学实训平台的结构及工作流程
1.1 整体结构
在设计环节采用台式构造模式对教学实训平台进行设计,主要包括电源、主控制面板、感应器、气缸以及PLC自动控制等装置。鉴于该实训平台的实际工作需求,选择三菱PLC装置,整体结构如图1所示。学生可以根据组态软件进行人机交互控制,同时,根据按钮与触摸屏对实训平台的系统进行控制。
1.2 工作流程
教学实训平台的实际运行流程:(1)给平台通电启动实训平台。(2)将需要分拣的物料投放到传输带上,向感应区域进行输送。(3)当感应器检测到物料为金属材质时,相应的气缸开始运作,将物料推送到金属下料槽中。(4)当感应器检测到物料为白色时,相应的气缸开始运作,将物料推送到颜色下料槽中。(5)当感应器检测到物料为非金属材质时,相应的气缸开始运作,将物料推送到非金属下料槽中。(6)如果在操作过程中出现故障,要马上按急停按钮。(7)物料分拣结束后要按停止按钮。
2 教学实训平台的硬件与软件设计
教学实训平台采用台式结构进行设计,采用异步电动机作为输送带的驱动机构,在网孔板上固定传感器装置。此外,实训平台的操作主要由气动装置与电气装置来实现,其中,电动部分依靠智能控制装置与传感器之间的配合来完成,并且需要对气动装置与电动装置等发出指令,才能实现平台根据物料属性选择推料方式。具体结构情况如图2所示。
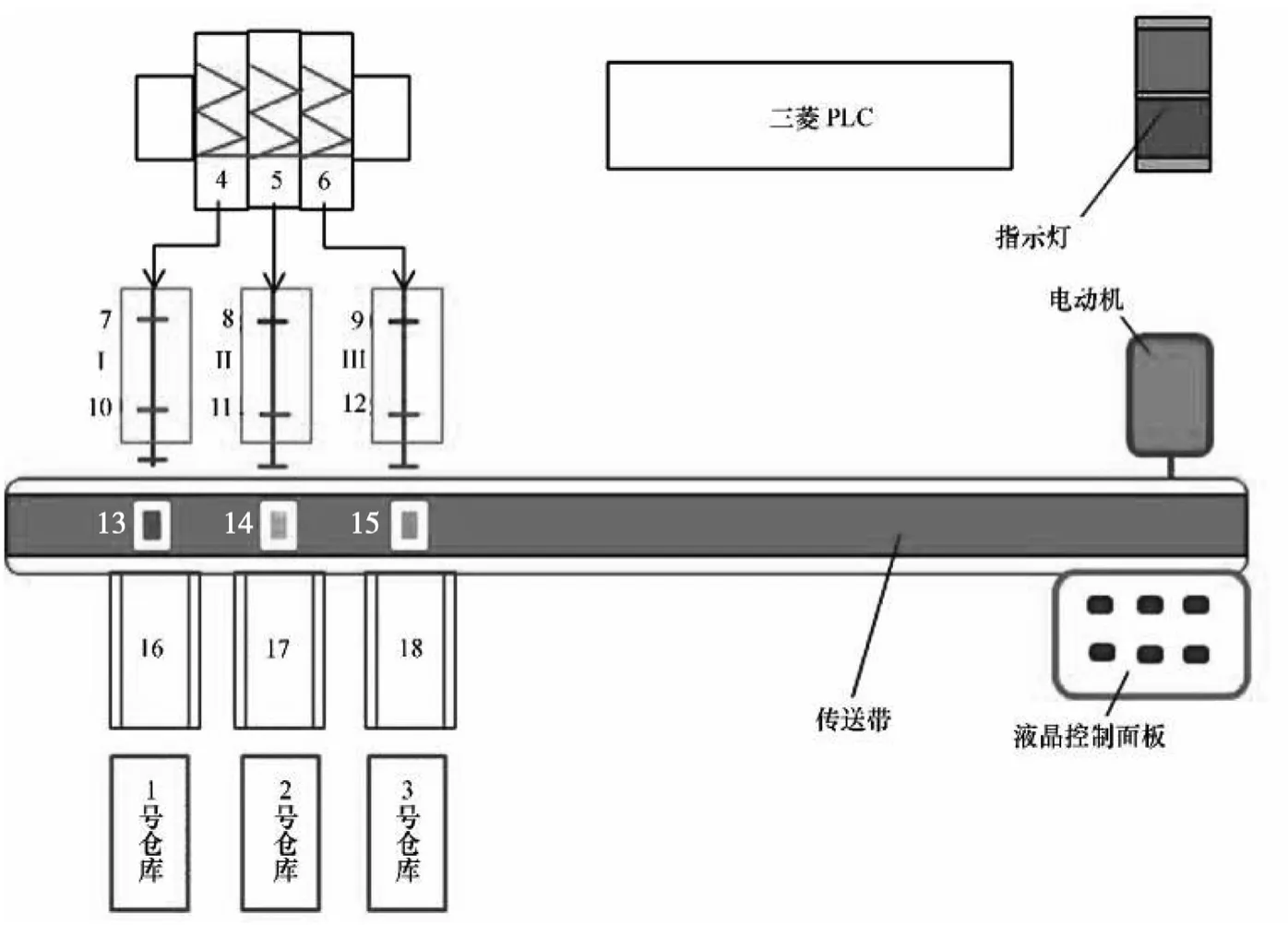
图1 物料分拣实训平台整体结构
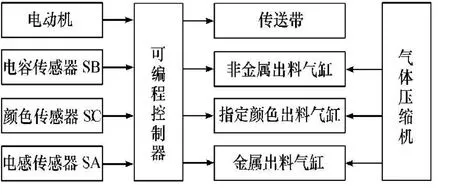
图2 教学实训平台硬件结构
2.1 工业机器人与PLC模块
当前,市场中的工业机器人品牌较多,不同品牌机器人的操作流程与实现效果也存在差异,因此,要贴合学生的实训需求来选择工业机器人,该实训平台最终选择ABB工业机器人负责物料的码垛与搬运工作。在PLC的选择中,市场中应用效果较好的有西门子、三菱以及东芝等品牌,在选择时也需要根据物料分拣实训台的流程与功能需求来考虑。本次设计的教学实训平台在端口处搭载了控制装置,并且保证控制信号装置的状态为开关量,进而将输出端与输入端的状态调整至最佳。所以,在对各型PLC装置的价格与性能等因素进行综合考虑后,选择FX2n-32MR的PLC作为实训平台的控制主机,该装置具有16个输出端与16个输入端,可以有效满足实训平台的功能需求。
2.2 电动控制模块
在针对教学实训平台的电动控制环节进行设计时,电能的交换工作由强电电路负责,以为平台电路的稳定性提供保障,具体由接触器、熔断器、电动机以及热继电器等装置组成。平台电器元件的控制工作由控制电路装置负责,具体由接触器、开关以及热继电器组成。该实训平台的主电路情况如图3所示。
为保证平台的稳定性与安全性,主电路需要具备良好的短路保护与过载保护功能。由于该实训平台需要在操作环节融合控制实验与机电传动,因此,选择的电动机型号为Y80M1-4,该电动机具有性价比高且轻便的优势,可以有效满足试验台的要求。FUI代表熔断器,当平台电流异常导致温度升高时,熔断器会自动断开,会对教学实训平台进行保护,以免其他装置受到短路问题的影响。本次设计采取双接触器模式,在一个接触器发生故障时,另一个接触器可以马上替代其进行工作,保证电动机的稳定状态[3-5]。
2.3 气动控制模块
教学实训平台的气动装置主要由执行部件与控制装置组成,负责对气动装置进行控制的为五通电磁阀,该元件可以准确执行指令,并且经过过滤减压阀与手阀开关的传输,达到电磁阀组,以此来对各气动元件进行控制。气动控制装置作业原理如图4所示。
在对教学实训平台的实际功能效果进行实验时,首先,接通电源,通过异步电机为传输带提供转动力,当自动感应装置发现传输带上有物料时,便会开始运转;当物料运输到相应位置时,电容传感器会针对物料的性质进行检测,并将信息传输至PLC控制器中,电子阀会根据指令执行推料工作。其次,当运动幅度达到限位器位置时,电磁换向阀会恢复到原来的位置,使推料缸回到原位,便完成了一次推料作业。指定颜色材料与金属材料装置的运作规律也是一样。
2.4 教学实训平台的软件设计
在启动平台后,X000功能便会被激活,此时急停功能X001与停止功能X002都处于非作业状态,保证3个气缸的位置处于回位限位状态,也就是X011,X012,X013保持正常的运行状态,同时,还要保证热继电器FR2正常,如果传送带不运作,则说明存在故障情况。物料分拣实训平台的顺序功能如图5所示。
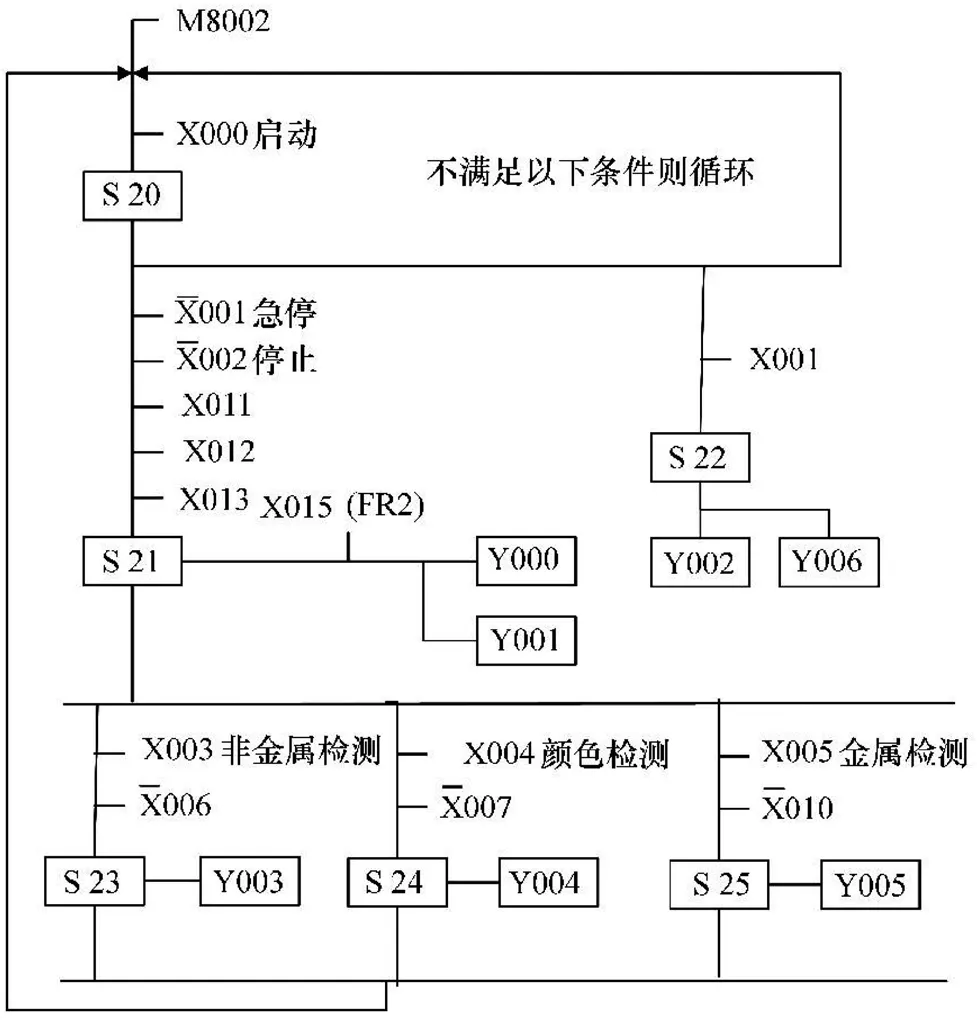
图5 物料分拣实训平台顺序功能
当实训平台装置正常运行时,需要传感器。PLC装置与物料分拣装置相互配合,根据物料性质选择合适的推料方式,当装置接到相应的命令,便会开展推料工作。具体流程:将物料推送至下料槽区域,最终传送到1号仓库;如果物料的性质为指定的颜色物料,则指定颜色物料推料装置便会接到相应的命令,开展推料工作。具体流程:将物料推送至滑槽,并且传动到2号仓库;如果物料的性质为金属时,则金属推料装置则会接到相应的命令,将物料推送至滑槽处以及3号仓库。当平台分拣过程中出现问题,需要及时进行急停,停止传送带的运作,在此过程中还要防止物料被抛出。
3 实验设计
根据物料分拣教学实训平台的构成与特点,可以设计以下教学实验。
(1)重点针对教学实训平台的电容感应器进行实验,可以根据各类材质的物料进行,能够判定出平台的系统识别能力,让学生了解到传感技术的应用原理,以进一步深化对传感器相关知识的理解。
(2)针对物料分拣平台的机电传动装置进行实验,根据平台的实际运行情况绘制相关的作业图,以帮助学生在实践中夯实理论基础。
(3)针对物料分拣平台的气动控制装置进行实验,通过对运行状态下气动控制元件的作业形式进行观察,来认识常用的气动元件,熟悉每一种气动元件所具备的功能与优势,以帮助学生明确了解气动控制装置的执行流程。
(4)针对物料分拣平台进行PLC编程实验,使用编程软件对实验平台的控制程序进行编辑,来实现对试验台的运作方式与节奏进行控制,对当前的分拣模式进行调整优化,以提升学生的编程经验,锻炼学生编译能力与逻辑思维。
4 结语
为满足学生实训环节的多元化需求,本研究将PLC与机器人控制等现代化技术相结合,设计出物料分拣教学实训平台,在实践应用中具备以下优势:(1)融合机电控制与传动技术、传感器技术、组态交互技术、液压气动技术以及PLC自动控制技术,可以有效满足高职院校学生的综合性教学任务。(2)集多功能于一身,可以解决传统教学平台的功能单一问题,为多学科提供多元化教学服务,使平台的应用效果更强。(3)嵌入了现代技术,在实际操作中可进行按钮与触摸的双通道控制,体现出平台的创新性与先进性,有效促进了高职院校学生综合能力的提升。
