模糊控制在尾矿池液位控制上的应用
2020-09-01许金龙
许金龙
(湖北大峪口化工有限责任公司,湖北 钟祥 431910)
0 引言
常规PID 控制器具有结构简单、稳定性好和可靠性高的特点,对于各种线性定常数系统的控制都能获得满意的控制效果,但在实际工业生产过程中,被控对象的环境多变,导致参数不定,甚至出现严重的非线性问题[1]。本公司选矿一部一期尾矿工段有两个尾矿池,设计采用单回路负反馈控制回路控制液位,其在该现场的工况下存在以下问题:①因尾矿进口流量波动较大,且尾矿池液位和执行器存在一定的滞后,PID 参数整定最优后,液位曲线也近似于等幅震荡曲线,无法达到自控专业要求的4:1 ~10:1衰减曲线;②驱动液力耦合器的电动执行机构动作幅度大,电动执行机构的电机及控制板因为过热经常损坏;③因转速变化幅度大,造成尾矿泵故障率偏高;④持续动作还会造成液力耦合器的油温偏高,增加更换传动油的费用。经过实践检验,使用模糊控制能解决以上问题。
1 模糊控制理论
在传统的控制领域里,控制系统动态模式的精确与否是影响控制优劣的最主要因素,系统动态的信息越详细,则越能达到精确控制的目的。然而,对于复杂的系统,由于变量太多,往往难以正确地描述系统的动态。换言之,传统的控制理论对于明确系统有强而有力的控制能力,但对于过于复杂或难以精确描述的系统,则显得无能为力了。因此,需要用模糊数学来处理这些控制问题。“模糊”是人类感知万物,获取知识,思维推理,决策实施的重要特征。“模糊”比“清晰”所拥有的信息容量更大,内涵更丰富,更符合客观世界。
模糊逻辑控制(Fuzzy Logic Control)简称模糊控制(Fuzzy Control),是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。1965 年,美国的L.A.Zadeh 创立了模糊集合论;1973 年他给出了模糊逻辑控制的定义和相关的定理;1974 年,英国的E.H.Mamdani首次根据模糊控制语句组成模糊控制器,并将它应用于锅炉和蒸汽机的控制,获得了实验室的成功。
在模糊逻辑控制中,最主要的一环是模糊逻辑推理,它需要专家的知识库做基础,通常可用n 个if…then 的型式来表述。另外,熟练的操作人员在不知道数学模型的情况下,也能够成功地控制这些系统,因此需要记录操作员的操作模式,并将其整理为if…then 的型式,以构成一组控制规则。
2 操作工的操作方法
尾矿池液位使用单回路PID 控制时,有时操作工会将调节器切换到手动位置。经过观察发现:操作工控制液位的方式都要在大脑里做3 个判断,一是液位当前高低程度;二是液位是在增加还是在减小;三是增加或减小的速度。根据这3 个判断,凭经验将阀位值给到一个值,经过一段时间后,再重复上述步骤对阀位值进行微调。由此可以总结出4 个if…then 规则:①if 液位在某一范围,then阀位(MV)对应一个开度范围;②if 液位是在增加(或减小),then 阀位应该在满足上个if…then 规则基础上,应该增加还是减小;③if 液位变化快,then 阀位在满足上2 个if…then 规则基础上,应该增加(或减小)多少;④if 液位变化慢,then 阀位在满足上2 个if…then 规则基础上,应该增加(或减小)多少。下面介绍根据这4 条规则完成的DCS 组态,该组态是在浙江中控的JX-300X 系统上实现的,并通过了现场使用测试。
3 模糊控制的DCS组态
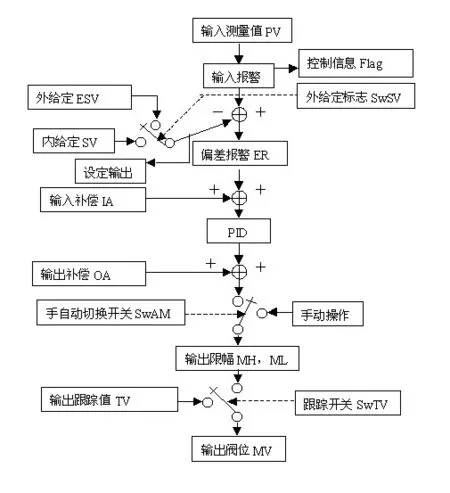
图1 浙江中控DCS单回路控制模块结构原理图[2]Fig.1 Schematic diagram of the structure of Zhejiang SUPCON DCS single-loop control module
在介绍尾矿池液位模糊控制的DCS 组态之前,有必要先说明该液位控制系统的控制目标。本文介绍的尾矿池是一个12m3的小池子,其液位高低与选矿车间产品质量及产量无关,所以控制目标是保证不溢流、不抽空。通常情况下,对于这种控制目标,可以用启停泵的方式控制液位,但是尾矿泵的电机是6000V、250KW 的高压电机,启停泵控制方式对电网冲击很大,所以不可取。为了解决引言中提到的问题,应尽量减小PV(液位)和MV 值的波动;另外,在工段开车时,操作工需要手动控制MV 值,所以控制目标中还要求保留手操器功能。下面就来介绍通过DCS图形化组态实现这些目标的方法。
因为要保留原有的手操器功能,所以在图形化组态中,主控制模块还用单回路闭环PID 控制模块,只不过增加了通过跟踪开关SwTV 来实现MV 跟踪TV 的功能,在下面的程序里只要对TV 的赋值进行编程就可以实现模糊控制。图1 是浙江中控的JX-300X 系统单回路闭环PID 控制模块的结构原理图。
在跟踪开关SwTV 为OFF 时,实现功能就是普通的PID 调节或手操控制(由手自动切换开关SwAM 切换);在跟踪开关SwTV 为ON 时,PID 输出无效,输出阀位值MV实时跟踪TV。
最终完成的模糊控制的图形化组态有2 个梯形图(LD)段落,图2 为模糊控制初始化梯形图,主要完成的功能是在系统切换到模糊控制后,根据液位所在范围给MV 赋初始值,相当于完成了上节提到的第1 个if…then 规则。在本例中,液位在0 ~20%时,对应15%MV 值;液位在20%~40%时,对应25%MV 值;液位在40%~50%时,对应35%MV 值;液位在50% ~60% 时,对应40%MV值;液位在60% ~80% 时,对应45%MV 值;液位在80%~100%时,对应50%MV 值。

图2 尾矿池液位模糊控制初始化梯形图Fig.2 Fuzzy control initialization ladder diagram of tailing pool liquid level
图3 为模糊控制主程序梯形图,计算方法是将上一个运行周期的液位值与当前液位值相减,判断液位是增加的趋势还是减小的趋势,从而决定MV 修正值(图2 的梯形图中变量ADDSUB)的正负, 相当于完成第2 个if…then 规则;同时还要判断这个差值(浮点数LTEM1 与LTEM2 之差)的大小,如果差值太小忽略不计(本例不小于0.1%),如果差值够大,对下周期的MV 进行修正,相当于完成第3个、第4 个if…then 规则。
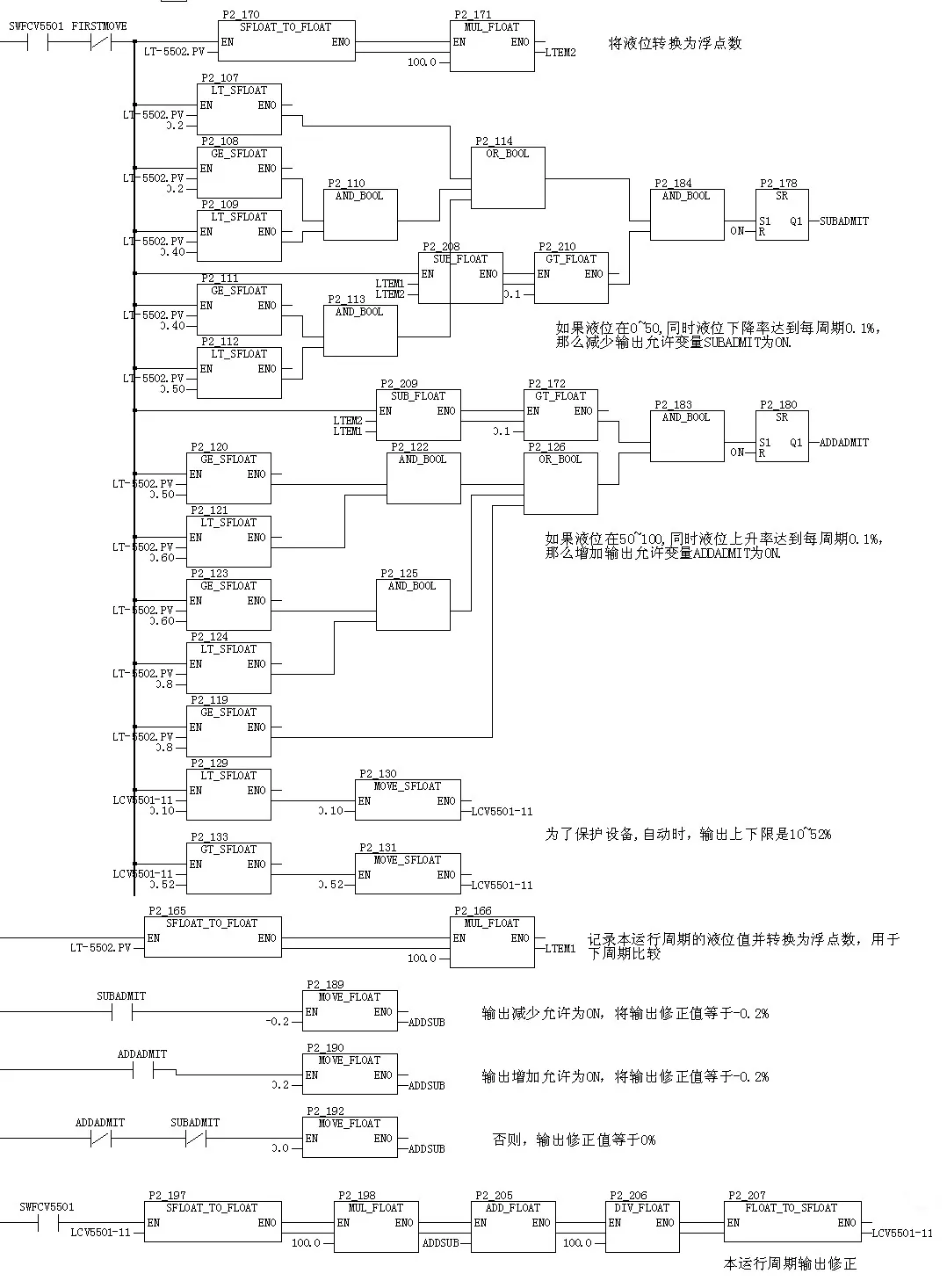
图3 尾矿池液位模糊控制主程序梯形图Fig.3 The main program ladder diagram of the fuzzy control of the tailing pool level

图4 尾矿池液位模糊控制效果图Fig.4 Fuzzy control effect diagram of tailing pool liquid level
值得一提的是:为了保证计算精度,中间计算过程都采用浮点数计算,最终结果转换半浮点数后赋值给自定义2 字节变量LCV5501-11,MV 值就是跟踪这个变量。
4 模糊控制的效果
上述的尾矿池采用模糊控制,并经过一段时间的观察后证明:完全满足不溢流、不抽空的控制要求,而且控制效果远远优于PID 控制。图4 为控制效果图,从图中看出,液位基本被控制在40%~60%之间,而如果采用PID控制,将PID 参数整定到最优后,液位波动范围还是在30%~70%之间。采用模糊控制后,因为液位及阀位值波动幅度小了,引言中提到的用PID 控制存在的问题得到了基本解决;另外,本文介绍的模糊控制的DCS 组态还有不少功能强化的空间,比如可以修改模糊控制主程序梯形图,将差值大小分几个档次,每档对应不同的MV 修正值(本例中修正值固定为0.2%),以减小找到最佳MV 值的时间。因为效果已经达到了,所以本例没有增加这段梯级的组态。
5 结束语
在保留原有PID 控制的基础上增加模糊控制,只需要修改DCS 组态,成本为零。本例证明:采用模糊控制能达到PID 控制不能达到的控制效果,而且提高了设备使用寿命。但是模糊控制相对于PID 控制来说,有适用范围窄、编程复杂、控制结果有余差,不容易修改目标值(SV)等缺点。不过随着控制理论的发展以及计算机技术的进步,预计将来在DCS 组态上会有模糊控制模块,那么模糊控制可能会有更广大的适用范围。
