植物根尖分生组织传感器的构建及其对尿素传感动力学研究
2020-08-30李丽娜庞广昌鲁丁强
牛 博,李丽娜,庞广昌,*,鲁丁强
(1.天津商业大学 生物技术与食品科学学院,天津 300134; 2.天津市食品生物技术重点实验室,天津 300134)
生物获取营养首先需要识别并传感到营养才可能根据自身对营养的需求情况吸收相应的营养。植物要平衡、调节其体内的营养,必须建立有效的传感系统,用来迅速传感各个营养素在根际土壤中是否存在及其浓度的信息,以应对土壤中可利用的养分在时间和空间上的剧烈波动[1]。氮是植物生长最重要的元素,尿素CO(NH2)2是全球最常用的氮肥[2]。尿素不仅相对含氮量高,而且是植物体内精氨酸循环的重要中间代谢产物,对植物体内的氮素循环和碳氮平衡起到重要作用。
高等植物对无机氮(铵态氮、硝态氮)和有机氮的传感吸收能力各有不同,现有的研究表明,大多数植物都存在对不同种类氮源的低亲和力和高亲和力2种传感转运系统[3-5]。迄今为止,对于氮源传感和吸收的研究主要集中在植物体内硝酸根离子转运系统和铵根离子转运系统,但对尿素传感、吸收和转运系统的鉴定和相关功能的研究还停留在尿素也可以作为植物快速吸收利用的氮源阶段[6]。虽然已发现了2类转运尿素的膜蛋白,即MIPs和DUR3,它们分别在低亲和力、高亲和力尿素吸收和运输中发挥作用[7-8],但是其确切的传感受体和机制仍需进一步的研究。
尿素的大量施用虽有助于农作物提高产量,但是由于植物对氮的利用效率并不清楚,这种做法会因为氮营养过剩而严重危害环境。寻找适合植物的最佳施肥量,需要深入了解不同植物根系传感和吸收营养的动力学规律[9-10]。植物根系对养分的传感能力始终受到科学家的关注,现有的研究方法多为通过同位素标记检测其相关的吸收动力学或是异源表达相关基因验证其效果,但根系对营养的传感能力应远高于其吸收能力,而生物必须先传感到营养才可以进一步吸收利用。本课题组经过多年研究,已经成功构建了动物受体传感器和动物组织传感器,并进行了相关物质的传感动力学研究[11-14]。目前在植物组织或植物受体传感器的研究方面尚未见报道,如果能够成功构建植物根分生组织和受体传感器,并对相应的营养物配体进行传感动力学研究,一方面有助于解决当下过度施肥引起的土壤板结和水环境污染;另一方面有助于进一步采用生物技术方法提高植物氮素利用效率[15-17]。该传感器的成功构建可为植物根系营养传感及其吸收和调节机制研究、农业精准施肥提供一种新的研究方法。
本研究选择玉米、辣椒、花椰菜和黄瓜4种植物的根尖分生组织组装传感器,定量化测定传感配体——尿素。通过电化学工作站和时间—电流曲线法测定尿素与玉米、辣椒、花椰菜和黄瓜根尖分生组织相互作用所产生的配体—受体识别和联动变构所产生的电化学信号,得到4种植物根尖对尿素的传感范围和相应的动力学参数,并通过相应的培养实验验证其真实的生物学作用。
1 材料与方法
1.1 材料与试剂
玉米(ZeamaysL.)、辣椒(CapsicumannuumL.苗、花椰菜(BrassicaoleraceaL.var.botrytisL.)、黄瓜(CucumissativusL.)苗各10株。可溶性淀粉、无水CaCl2、尿素等均购自天津市赢达稀贵化学试剂厂(中国)。海藻酸钠来自天津光复精细化工研究所(中国)。所有其他化学品均为分析纯。去离子水来自Millipore公司的Milli-Q纯水系统(Elix Essential 5,美国),并被用在所有的实验中。
CHI660E型电化学工作站购自上海辰华仪器有限公司(中国上海);核微孔膜(孔径0.22 μm,周长25 mm)购自Whatman公司(英国)。
1.2 电极预处理与效果表征
将玻碳电极(glassy carbon electrode, GCE)用不同粒径的α-Al2O3浆(1.00、0.30、0.05 μm)在麂皮上抛光,每次抛光后在超声波水浴中清洗30 s,重复2~3次,然后用超纯水清洗玻碳电极。在1 mol·L-1H2SO4溶液中使用循环伏安法对玻碳电极进行活化,活化时电压的扫描范围是-1.0~1.0 V、扫描速率是100 mV·s-1,重复扫描直至出现稳定的循环伏安曲线图。
将活化的玻碳电极置于1×10-3mol·L-1K3Fe(CN)6溶液(含0.20mol·L-1KNO3)中对其进行循环伏安曲线扫描,电压的扫描范围为-0.1~0.6 V,扫描速度为50 mV·s-1。同时,使用交流阻抗法表征电子传递到电极表面所受到的阻抗大小,以达到间接表征电极预处理后的界面情况。最后置于氮气环境中干燥待用。
1.3 电化学生物传感器的制备
溶液配置:①1%的可溶性淀粉溶液:称取1 g可溶性淀粉溶于99 mL超纯水中,之后加入1 mL 10%的戊二醛,80 ℃水浴搅拌加热30 min。室温条件下放置过夜。②2%的海藻酸钠溶液:称取2 g海藻酸钠溶于100 mL超纯水中,搅拌过夜。③ 5%的CaCl2溶液:称取5 g CaCl2溶于100 mL超纯水中。④将1%的可溶性淀粉溶液与2%的海藻酸钠溶液以体积比1∶1混匀在平皿中,另取一平皿吸取等体积的5%的CaCl2溶液。
固定化植物组织传感器组装:将新鲜的根尖分生组织用超纯水清洗干净,在细胞培养皿中用手术刀切碎,过程中保持根尖湿润,立即储藏在4 ℃冰箱中备用。
将准备好的0.25 cm2的植物根尖分生组织放置于一张直径为25 mm、孔径为0.22 μm的核微孔膜的圆心上,然后覆盖另一张,迅速将1号培养皿中的混合液均匀涂抹在核微孔膜边缘,再将其边缘浸没在2号培养皿中,使得海藻酸钠与CaCl2完全交联,得到稳定的螯合物,然后用超纯水冲洗组装好的植物根尖分生组织测定膜,冲洗掉残留在膜上的Cl-、Ca2+等离子,最后将组装好的植物根尖分生组织测定膜用皮筋固定在玻碳电极上,植物根尖分生组织要完全覆盖电极极芯,再用超纯水冲淋电极制成生物传感器(图1)。
1.4 电化学生物传感器对植物根尖分生组织的测定方法
采用三电极系统,以固定好的“三明治”式植物根尖分生组织膜的玻碳电极作为工作电极,以Ag/AgCl电极作为参比电极,以铂丝电极作为对电极,以超纯水作空白对照,在一定的电压下通过电流—时间测定法测定尿素溶液与植物根尖分生组织作用的响应电流值,以响应电流的变化率作为检测指标,每个浓度平行测定3次。按公式(1)计算响应电流的变化率ΔI。
(1)
式(1)中:I1表示空白对照的响应电流值/A,I2表示待测定尿素溶液的响应电流值/A。
2 结果与分析
2.1 电极预处理效果的电化学表征
由图2-A可以看出,电位差在80 mV以下,峰电流比值趋近于1。由图2-B可以看出,在不同扫描速率条件下(25、50、75、100、125、150、200 mV·s-1),活化后的玻碳电极(GCE)还原峰和氧化峰电流均和扫描速率的平方根呈良好的线性关系,说明玻碳电极经过处理后其氧化还原峰电流仅受扩散条件控制,玻碳电极作为裸电极的预处理效果达标,可以进行后续的组装研究。
2.2 电极组装过程及电化学表征
由图3可以看出,在扫描速率为50 mV·s-1,扫描范围为-0.1~0.6 V的条件下,玻碳电极使用双核微孔膜组装后,由于核微孔膜阻碍了电子向电极表面的传递,所以峰电流值低于裸电极峰电流值;在两层膜中间组装上植物根尖分生组织后峰电流值进一步减小,这是由于植物根尖分生组织进一步阻碍了电子的传递。由图3峰电流的变化可以看出,该组织传感器组装成功。
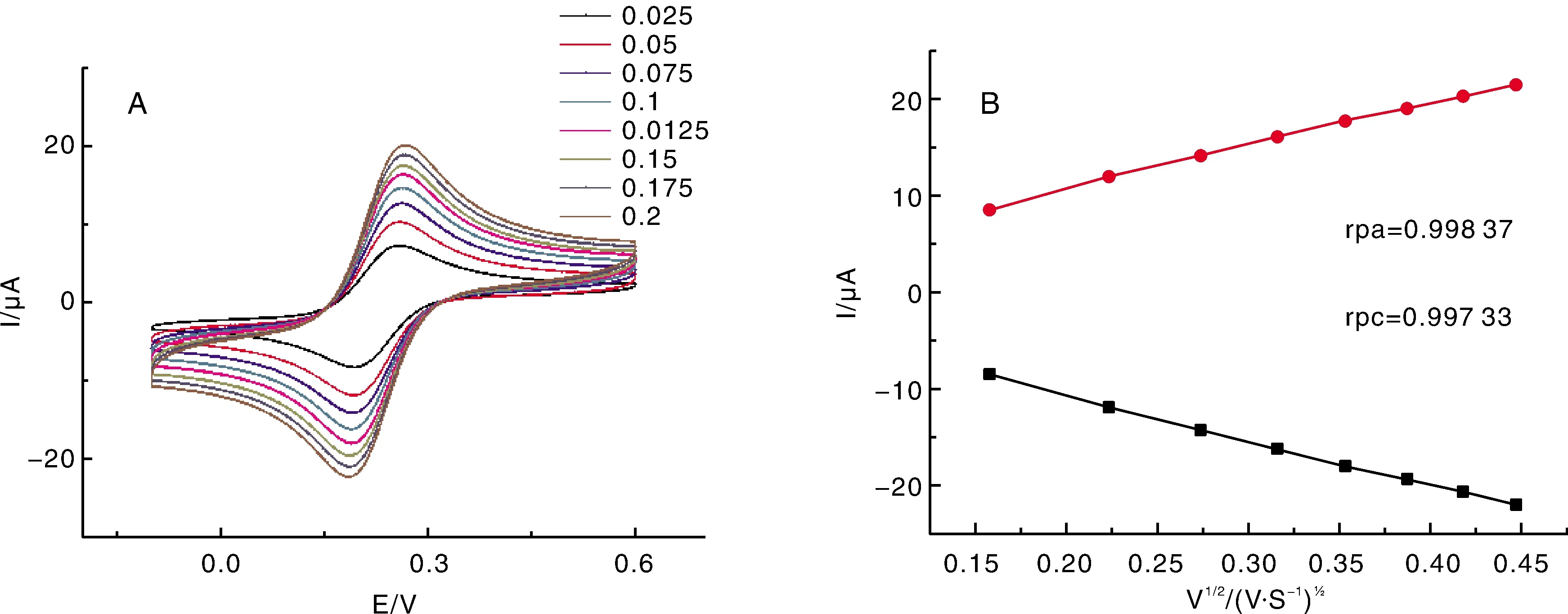
图2 玻碳电极预处理效果的循环伏安法表征(A)及预处理后的玻碳电极的还原峰和氧化峰电流和扫描速率的关系(B)Fig.2 Cyclic voltammograms of bare GCE (A) and relationship between scan rate and electric current of oxidation peak or reduction peak of bare GCE (B)

图3 循环伏安法对电极不同阶修饰段的表征Fig.3 Characterized electrode at different modification stages by cyclic voltammetry
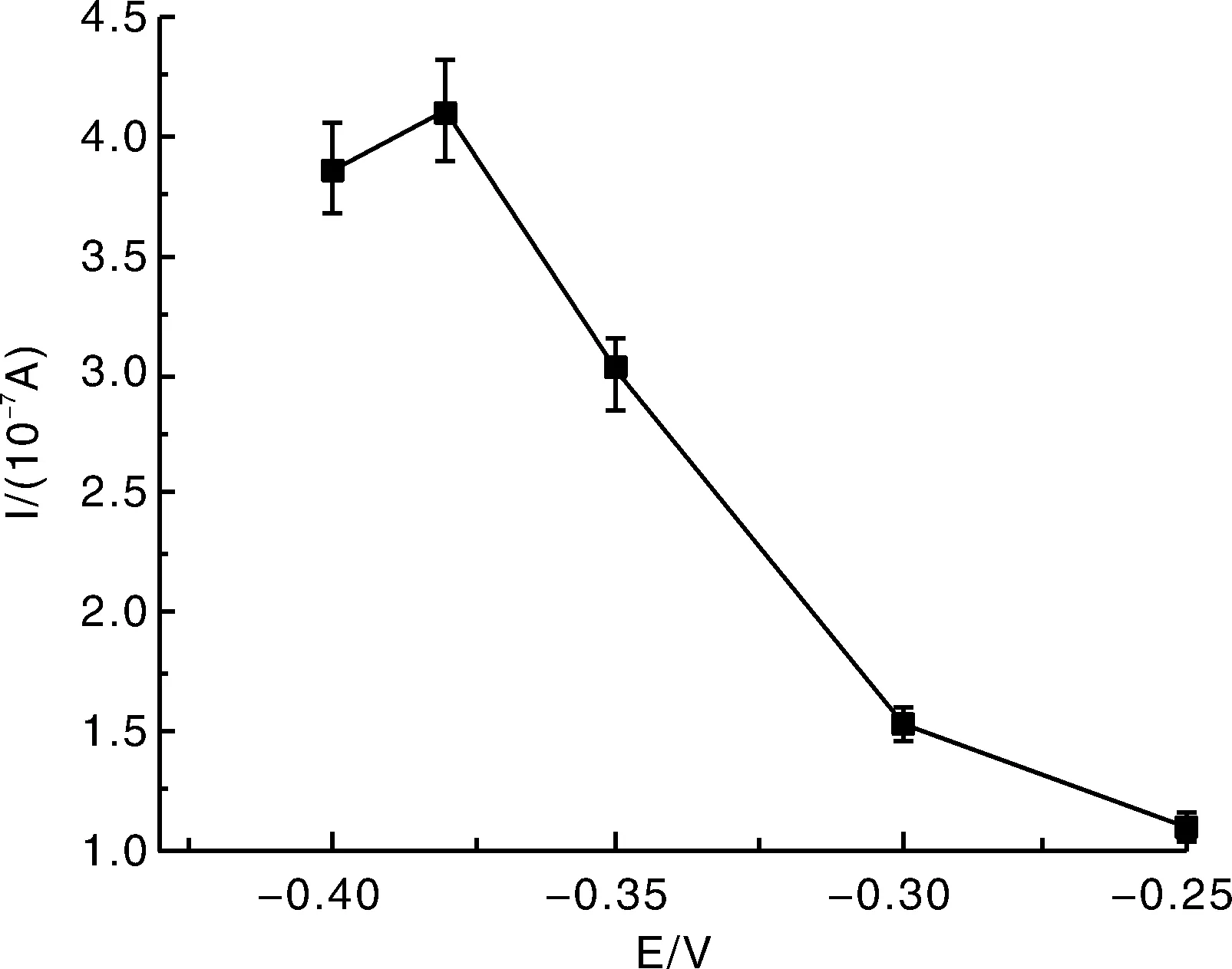
图4 电位对生物传感器响应效果的影响Fig.4 Effect of response potential on the biosensor
2.3 电流—时间测定法的电位优化
将构建好的植物根尖分生组织传感器置于超纯水中,采用电流—时间法,在不同电位下测试。以加入1×10-6mol·L-1的尿素前后稳态电流差去衡量不同电位对该传感器电化学响应效果的影响。由图4可知,该传感器在-0.38 V时电流变化值最大,我们选择-0.38 V为恒电位进行植物根尖分生组织传感器对尿素传感动力学特性的研究。
2.4 植物根尖分生组织传感器对尿素浓度的检测范围
将固定好的植物根尖分生组织传感器用不同浓度的尿素溶液刺激,浓度从低到高依次测定,时间—电流法扫描,扫描电位选择-0.38 V,静置10 s左右,使受体和尿素充分结合后,第100秒电流值为稳态电流,每组实验均平行测试3次,采用的数据是经仪器软件平均化后的响应电流,以减少误差。以电流在受体—配基结合前后电流的变化率△I为纵坐标,为方便后续计算以配基—尿素浓度C(mol·L-1)的对数值lg(C)为横坐标作图,结果如图5,在低浓度范围内,电流变化值呈线性增长,说明此时根尖对尿素的传感能力远大于尿素的量,后一部分呈曲线式缓慢增长,说明组织对尿素的传感能力已接近上限。实验目的是找到最小响应浓度,继续增大尿素浓度对后续细分测试浓度和联动变构常数的计算没有影响。因此,无需继续增加尿素浓度。
由图5知,玉米、辣椒、花椰菜和黄瓜分别在10-9~10-3、10-16~10-6、10-19~10-10和10-20~10-10mol·L-1尿素的浓度范围内,响应电流的变化率随着浓度的增加呈现类似酶促反应动力学曲线。
2.5 植物根尖分生组织传感器对尿素传感作用的动力学曲线
由图5对电流变化率ΔI呈线性变化的浓度范围做进一步的细分,通过时间电流法测定,用Origin 2019软件分别对得到的参数曲线进行双曲线拟合,得出4种植物准确的受体—配体互作动力学参数[18],如图6。
根据受体—配体互作动力学方程

(2)
当组织上的受体饱和时:
(3)
设[RT]为受体的初始浓度,则[R]=[RT]-[RL],设[LT]是总配基浓度,则[L]=[LT]-[RL],将[L]=[LT]-[RL]和[R]=[RT]-[RL]代入(3)式,经整理得
[RL]2-[RL]{[RT]+[LT]+Kd}+[RT][LT]=0。
(4)
上式为以[RL]为变量的一个双曲线一元二次方程。当[RT]、Kd为固定时,[RL]随[LT]的变化而变化,开始上升地很快,以后逐渐趋向于水平,这就是受体—配体互作的饱和曲线[19]。该式说明了受体与配体的结合具有配体饱和的效应,和米氏酶促反应动力学有相似的特征。于是我们可以获得类似于Km值的重要动力学参数Ka(配体—受体互作所产生的联动变构激活常数)。
从图6可以看出,在较低浓度下,电流的变化率随尿素浓度的增加而增加,表明此时根尖组织上的受体传感能力远高于检测溶液中的配体浓度。当达到一定浓度时,随着尿素浓度的持续增加,电流的变化率基本恒定或变化非常小,表明此时根尖组织上的受体传感能力已达到饱和。上述过程表明,传感器不仅反映了受体与配体的结合,还反映了受体与配体结合后的通过细胞内信号传导和级联放大导致的电化学信号的改变,如离子通道的开启或关闭。
2.6 尿素与植物根尖分生组织上的受体互作所引发的联动变构常数
对公式(4)变形,可以推导出
(5)
以1/[RL]为纵坐标,以1/[L]为横坐标的双倒数方程。直线的斜率为Kd/[RT],横轴截距为-1/Kd,纵轴截距1/[RT]。根据上述推导,再以尿素溶液浓度的倒数为横轴,以电流变化率的倒数为纵轴通过Origin 2019软件线性拟合。
得到拟合的线性回归方程分别为:

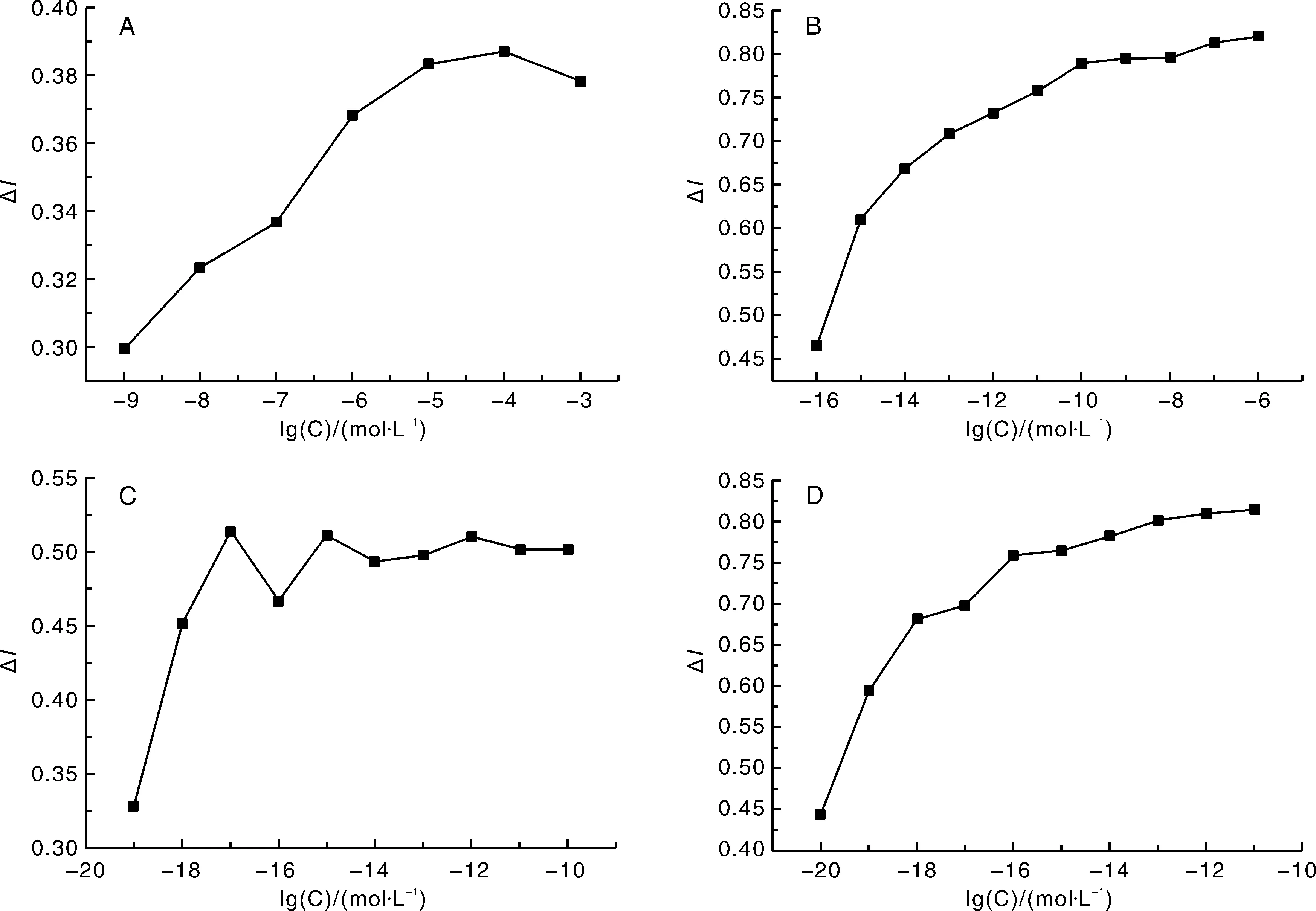
图5 玉米(A)、辣椒(B)、花椰菜(C)和黄瓜(D)在检测范围内的电流变化率Fig.5 Current changes of corn (A), pepper (B), broccoli (C), and cucumber (D) in the detection range



由上述方程分别计算得出4种植物的根尖分生组织对尿素的联动变构常数Ka,如表1所示。
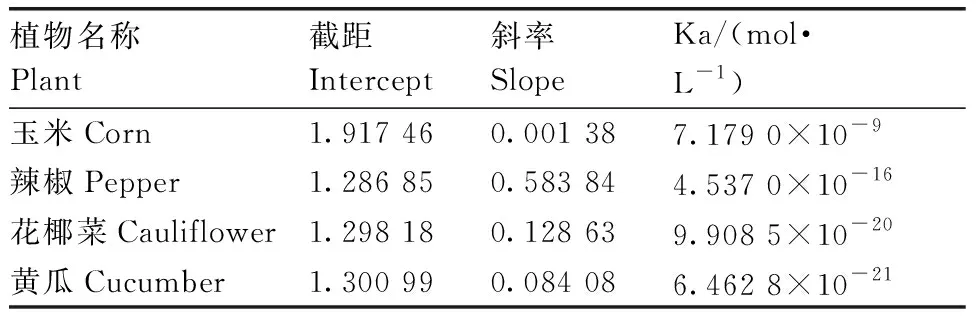
表1 根尖组织对尿素的联动变构常数
此处的联动变构常数Ka和酶促反应参数Km值相似,定义为:达到组织上传感受体饱和(电化学信号放大效应)一半时的配体浓度。显然Ka越小,说明配体通过与受体互作所产生的电化学信号变化效应越高,传感越灵敏。玉米的Ka值比其他3种植物至少高7个数量级。可以推断玉米相较于其他3种植物,对尿素的传感能力很弱,或可判断为:玉米在一定程度上存在对尿素的传感缺陷。
2.7 植物组织传感器的稳定性及重现性
将制成的辣椒根尖组织传感器在1×10-16mol·L-1的尿素溶液中连续测定10次,电流变化率的RSD为4.73%,表明该受体传感器稳定性能良好。取不同批次制备的电化学型组织传感器5支,制成的玉米根尖组织传感器在1×10-6mol·L-1的尿素溶液中连续测定10次,电流变化率的RSD为2.52%,表明该受体传感器稳定性能良好。
将构建好的根尖组织传感器于4 ℃的超纯水上方保存,每间隔24 h测定同一浓度的尿素溶液,第1~5天该传感器的响应电流比较为稳定,分别为100%、99.64%、88.32%、75.73%、70.01%;第6天的响应电流比为63.22%,表明该类型组织传感器至少可稳定使用5 d。
2.8 辣椒与玉米对尿素传感动力学常数的比较与验证
根据实验结果,玉米与其他3种植物的传感能力有显著差距,辣椒根尖组织可以在10-15~10-10mol·L-1对尿素传感,而玉米在该浓度范围内应无明显的传感能力。为了验证通过植物根尖分生组织传感器所测定的动力学常数是否真实反映了植物根尖对尿素的传感能力,我们以尿素为唯一氮源,在10-15~10-10mol·L-1的尿素培养液中,对玉米和辣椒苗进行培养实验。
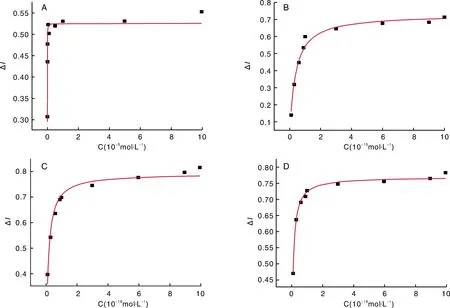
图6 玉米(A)在10-8~10-4 mol·L-1、辣椒(B)在10-16~10-14mol·L-1、花椰菜(C)在10-19~10-4 mol·L-1和黄瓜(D)在10-20~10-18mol·L-1浓度范围内电流变化率及双曲线拟合Fig.6 Corn (A) at 10-8-10-4mol·L-1, pepper (B) at 10-16-10-14mol·L-1, cauliflower (C) at 10-19-10-4mol·L-1 and cucumber (D) at 10-20-10-18mol·L-1 current change rate and hyperbolic fitting in the concentration range
如图7所示,我们将玉米与辣椒共同培养在尿素浓度从左至右依次为1×10-10、1×10-11、1×10-12、1×10-13、1×10-14和1×10-15mol·L-1的培养液中。结果表明:玉米在10~15 d内相继死亡,而辣椒在培养液中正常生长。证明了玉米在低于其传感能力的尿素培养液中不能正常生长,而辣椒可以在该尿素浓度范围内正常生长。说明我们通过根尖分生组织研制的传感器及其对尿素的传感参数的确真实地反映了根对尿素的识别、传感和吸收能力,同时发现,和其他3种植物相比,玉米对尿素的传感存在明显的缺陷。
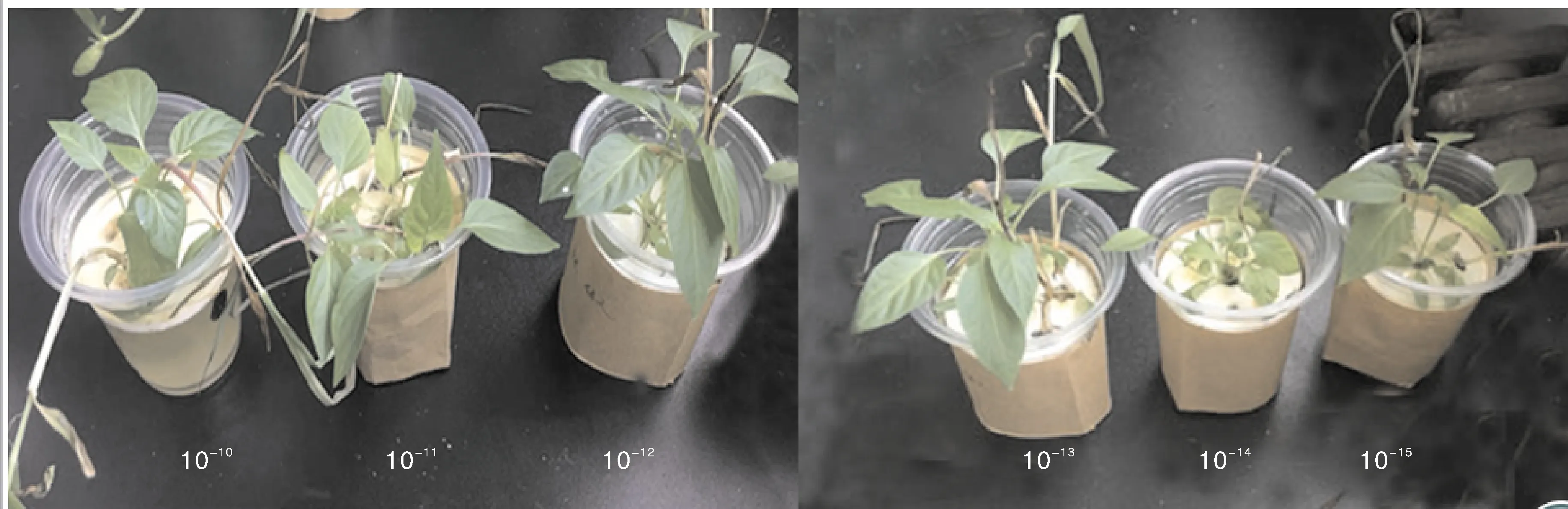
图7 玉米和辣椒在从左至右10-10~10-15mol·L-1的尿素溶液中培养Fig.7 Corn and pepper cultured in 10-10-10-15mol·L-1 urea solution from left to right
3 讨论
过去一些植物学的经典理论认为尿素作为氮肥发挥作用需通过土壤中微生物产生的脲酶水解为CO2和NH3,NH3再被植物吸收利用。但现在越来越多的研究表明:在无土壤微生物存在的条件下, 外源尿素也可以被植物根系直接吸收,并在未降解的情况下转运至地上部分[6]。近年来的研究进一步表明:可能存在2类不同的转运体系,即需要能量且逆尿素浓度梯度的主动吸收途径和膜蛋白促进型的尿素跨膜扩散的被动运输途径,即依赖于膜蛋白的尿素低亲和力传感转运体系和高亲和力传感转运体系[20]。通过固定根尖分生组织制备的生物传感器,首次定量化测定了玉米、辣椒、花椰菜和黄瓜根尖分生组织对尿素的识别和传感规律,得到4种植物根尖分生组织与尿素的双曲线动力学模型,并计算出4种植物的重要动力学参数(Ka),分别为Ka玉米=7.179 0×10-9mol·L-1;Ka辣椒=4.537 0×10-16mol·L-1、Ka花椰菜=9.908 5×10-20mol·L-1和Ka黄瓜=6.462 8×10-21mol·L-1。通过对比发现:玉米对尿素的传感能力远低于其他3种植物。为了验证这些参数的生物学意义,以尿素为唯一氮源,在10-15~10-10mol·L-1尿素的液体培养基中对玉米和辣椒苗进行了培养和验证实验,结果证明:玉米在10~15 d内叶片枯黄死亡,而辣椒则可以正常生长,证明所得到的动力学参数(联动变构常数Ka)真实地反映了植物根系对尿素的传感能力,同时证明:和其他3种植物相比,玉米对尿素的传感存在明显的缺陷,其具体受体及其传感、吸收和控制机制有待进一步深入研究。
4 结论
本研究成功地构建了一种植物根尖组织生物传感器,并通过该传感器定量化测定了尿素对玉米、辣椒、花椰菜和黄瓜的根尖组织互作、识别与联动变构常数Ka,通过研究4种植物对尿素的传感动力学,验证了植物根尖可以直接传感尿素,且不同种类的植物传感尿素的能力不同。通过对玉米和辣椒在尿素为唯一氮源的液体培养基上进行的培养实验,证明这些参数的确能够反映植物根系对尿素的识别、传感和吸收能力,同时也发现玉米存在对尿素识别、传感和吸收缺陷,为进一步深入研究植物对尿素的识别、传感、吸收和调控机制奠定了基础。该生物传感器操作简单、易行、成本低、稳定性和重现性良好,为探寻植物根系对土壤中有效营养成分的传感利用及其动力学研究,为合理施肥、提高作物产量等提供了一种新方法。
