红外高速测控链路计算仿真及其系统构建研究
2020-08-26王凯丽杨红绢窦云奇郑文琦董言治
王凯丽,杨红绢,窦云奇,郑文琦,董言治
(烟台大学光电信息科学技术学院,山东 烟台 264005)
随着高速芯片、高精度传感器和信号处理等相关领域的快速发展,实时高速测控技术越来越显示出其在交叉学科的重要地位.得益于实时、快速、高效、非接触、高精度等优点,实时高速测控系统能够有效地获取被测对象的位置以及姿态信息,也是尖端技术应用领域的重要研究课题,因此高速测控系统的研究具有重要的理论和实际应用意义[1-4].
在很多高精尖设备的复杂测试系统中,都要求能够实时数据分析,以便在任何一个子系统出现故障时能够及时地对测试目标的行为做出反应[5-6].其中由于环境因素的限制,系统的链路会呈现出不同的特性,主要包括空间特性、时间特性和非对称特性等[7-8].近年来,有很多学者对系统链路进行了研究,现有的国内外链路研究主要有基于链路特性的链路质量评估方法、干扰条件下卫星通信链路计算研究、地理位置对卫星动中通链路影响的研究等[9-11].
本文从系统的链路模型方面进行研究,通过对系统的链路模型的相关计算和系统信噪比与距离之间的关系,用理论计算链路为光源的选型提供了依据,并且通过构建系统模型用于实际操作,为后续类似工作提供了参考.
1 系统理论与仿真
1.1 链路模型
从辐射链路[12]这个角度来看,我们考虑一个视线(LOS)强度调制直接探测(IM/DD)的链路模型.同时,假设发射端包含一个或多个LEDs可以向半球空间内发射光子,其辐照空间函数IS(d,φ)可由下式表达:

(1)


(2)

图1 LED发射器与光电二极管(PD)组成的光学链路
对于位于(d,φ)位置的PSD接收器来讲,其接收到的光功率PRX为
PRX=ISAeff,
(3)
对应产生的光电流Ip为
Ip=RPRX.
(4)
一般来讲,Aeff是发射光到达接收机表面的入射角度Ψ的函数.当Ψ=0时,接收机正好指向发射机.假设接收机中的光电二极管的光感面积为A,光学滤波函数为TS(Ψ),光学天线增益为g(Ψ),那么对应的有效面积Aeff(Ψ)为
Aeff(Ψ)=g(Ψ)TS(Ψ)Acos(Ψ),
(5)
对于给定频谱宽度的LED,其发射光到达接收机表面的角度为ψ,Ts(ψ)为接收机的光学滤光系统的透过率,这里假定接收机的光学天线的为理想增益g(ψ),近似满足如下关系:
(6)
一般来讲,光学镜头满足式(6)中描述的理想增益关系.如果没有光学镜头,对应n=1(自由空间),Ψc=90°,此时增益为1.
在自由空间的光学链路中,存在着许多潜在的噪声源,对于室外系统来讲,主要的噪声源来自于同性环境光引起的散粒噪声.接收机中的光学滤波器可以有效地降低环境光引起的噪声,其效果相当于一个带通滤波器.假定该带通滤波器的光谱宽度为Δλ,带内的透过率为Tn,带外的透过率为0.我们还假设接收机的环境背景噪声为白噪声,即在带通范围内恒定,并定义其光谱辐照度(每单位光电探测器面积的每单位光谱的光功率)为Pbg.使用理想的折射率为n的光学聚光器,入射到光电二极管上的环境光功率为
Pn=PbgΔλTnAn2.
(7)


(8)
式中:q是电子电荷,单位为C;B为接收机带宽,单位为Hz;R为光电二极管的响应度,单位为A/W.在这里,我们暂时忽略探测器的热噪声[13].接收机的SNR为

(9)
此时,信号链路覆盖范围和主链路波束宽度如图2所示.如果接收机距离小于或等于d0,接收机位于角度|φb|≤θa范围内保证链路连接Bb≥Bb0.Φ1/2,p为主链路波束宽度,Bb为接收机带宽,Bb0为设计要求带宽.

图2 信号链路覆盖范围和主链路波束
1.2 SNR与距离之间的关系
一般来讲,接收机的距离d0对接收机指向Ψb的敏感度取决于接收机镜头的光学天线增益gb(Ψb),光学滤波片透过率Ts,b(Ψb)和几何因子cos(Ψb).假定接收机允许的最大指向偏差为θa=45°.目标LED发射器位于(x,y)=(0,0)的位置,并指向y轴正方向.LED的发射峰值功率为Pb=3 W,占空比为50%,因此平均发射功率为1.5 W.白天条件下的背景噪声为Pbg=5.8 μW·nm-1·cm-2,接收机的光学滤波片的带宽为Δλ=100 nm,透过率为Ts,b=Tn,b=0.8.硅基位置敏感探测器的响应度R=0.6 A/W,有效面积为1 cm2,光学聚光器的折射率为n=1.5,接收机带宽为B=150 kHz.
根据方程(9),基于上述条件,我们可以计算位置敏感探测器信噪比与探测距离之间的关系,并给出SNR与接收机相对发射机位置的函数关系,如图3、4所示.

图3 发射机与接收机完美对准信噪比与传输距离关系(φb=0)
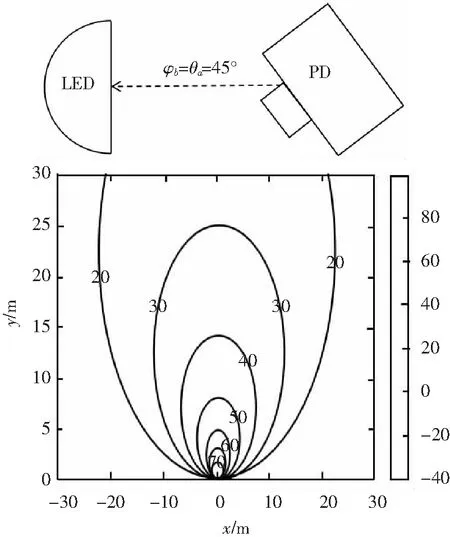
图4 发射机与接收机之间存在45°偏差信噪比与传输距离关系(φb=45°)
图3显示了当接收机正好指向发射机时(φb=0),SNR随空间变化的等值线图.图4在同等条件下,当接收机与发射机存在45°偏差时,SNR随空间分布的情况.
从图3与图4的信噪比来看,在LED与PD的主轴角度为0时,在30m左右的位置,信噪比大约为30dB,如图3所示;而在LED与PD的主轴角度为45°时,在30m左右的位置,信噪比大约在20dB,如图4所示.从2幅图的对比来看,在30m左右的距离,PSD的信噪比在20至30dB左右.
2 系统搭建
同步发光源高速识别系统框架如图5所示,主要由靶标控制器、靶标(940nm激光发射源)、接收器(940nm)、接收控制器、波形显示器、电源和VGA显示器等设计组成.

图5 同步发光源高速识别系统结构
(1)靶标控制器系统 靶标控制器系统主要由显示器模块、FPGA处理系统、通信线缆、电源供电部分等组成,负责接收同步信号,进行解算、处理,然后根据编码规则生成并发送靶标控制信号,同时发送显示模块.
(2)靶标 靶标主要由3W940nm灯珠发射源组成,其功能为在靶标控制器系统的控制信号下,辐射符合要求的光脉冲,脉冲闪烁频率为200Hz,为系统的靶标识别提供光源.
(3)光学系统和PSD器件PSD位置传感器是一种能测量光点在探测器表面上连续位置的光学探测器,可将光敏面上的光点位置转化为电信号.光学系统用于控制靶标发射的光进入PSD器件的光通量,从而使PSD器件在正常范围内工作.
(4)接收处理器系统 接收器系统负责通过PSD器件接收靶标发送的激光脉冲信号,并转换成差分电信号经由信号放大和调理电路预处理后,通过ADC模块转成数字信号输入到FPGA处理系统,利用内嵌的算法和处理程序,解码信号,给出定位光靶标识别结果.
(5)波形显示模块 波形显示模块主要由VGA显示器和多通道示波器组成,显示接收处理器系统输出的波形和判断结果.
3 结果与讨论
根据理论计算结果,系统选用3W的红外光源,满足了30m处的探测器的信噪比要求,实现了200Hz的数据刷新率,达到了系统的设计指标.
系统由合作靶标、光电传感器和处理器组成了超高速高动态三维位置姿态测量,利用红外光信号信噪比和高速硬件达到立体视觉测量系统的精密标定,实现了目标的三维位置姿态测量.
本文从系统的链路模型方面进行研究,通过对系统的链路模型的相关计算和系统信噪比与距离之间的关系讨论,为光源的选型提供了链路理论依据,并且通过构建系统模型用于实际操作,验证了理论计算的正确性,为后续类似工作提供参考.
为了进一步提高红外高速测控系统的精度和可靠性,下一步将分析影响标定结果的精度和稳定性的因素,并对光电采集系统进行误差分析,以进一步提高性能指标.
