面向机载电子侦察设备的雷达与通信信号一体化测向技术
2020-08-26何晓明朱晓锦
吴 健,何晓明,朱晓锦
(1.中国电子科技集团公司第五十一研究所,上海 201802;2.上海大学,上海 200072)
0 引 言
电子侦察设备可对敌方电子设备的电磁辐射源信号进行搜索、截获、识别、分析和定位,为实施电子干扰、电磁防御、辐射源打击提供战术电子情报支持[1]。机载电子侦察设备有着机动性好、探测距离远等诸多优点,多年来一直是多国重点发展的武器装备。为了适应日益复杂的现代战争需求,机载电子侦察设备正朝着侦察目标多样化、功能齐全化、处理智能化的方向发展[2]。这一发展也使得电子侦察设备对载机的装机空间、重量、功耗和散热提出了更高要求。为了保证电子侦察设备有良好的装机适应性,势必开展电子侦察设备的综合化、一体化设计[3-4]。正是基于上述背景,本文进行了雷达与通信信号一体化测向技术研究。雷达侦察与通信侦察通过天线阵列、接收前端、校正源等资源的复用,极大地缩减了装机设备量,使得机载电子侦察设备的体积、重量、功耗等指标得到了极大缩减,具有了更好的装机适应性。
1 需求分析及总体设计
为了研究雷达与通信信号一体化测向技术,首先必须对雷达与通信信号的特点进行分析。雷达与通信信号在传统认识上存在有明显的差异,但是随着科学技术的迅猛发展,二者已经日趋相同。为了更好地理解雷达与通信信号,本文将从功能、信号工作频段、功率等几个方面进行分析。
(1) 功能
雷达的主要目的是确定探测目标的位置、速度、类型等属性,通信的目的是以电磁波为载体传递有用信息。现代武器装备大多同时装备雷达、通信等电子设备。采用雷达与通信一体化测向技术,可以同时从雷达和通信2个领域对同一武器平台进行测向定位,可以大幅度提高侦察效率和侦察置信度。
(2) 工作频段
国际电信联盟对雷达设备和通信设备所使用的工作频段有严格的划分,常规雷达工作频段及用途如表1所示。

表1 常规雷达工作频段和用途
通信信号占据的工作频段主要分布在高频(3~30 MHz)、甚高频(30~300 MHz)和特高频(225~400 MHz)。还有部分专用数据链和导航信号分布在L频段。
综合上述分析,在VHF、UHF、L频段,通信信号和雷达信号工作频段有重叠,可开展一体化设计工作。综合考虑天线尺寸因素,最终在L频段开展雷达与通信信号一体化测向工作。
(3) 功率
雷达设备和通信设备由于在功能上有着明显区别,二者在辐射功率上也存在着明显的不同。雷达辐射的功率一般都比较大,远程预警雷达的辐射功率可达兆瓦量级;通信信号的功率相比雷达就很小了,像手机辐射功率就是毫瓦级,电台信号也不会超过百瓦级别。因此,电子侦察设备在对雷达信号和通信信号的侦察灵敏度上也存在较大差异,通信侦察灵敏度和雷达侦察灵敏度相差达30 dB。在开展雷达与通信信号一体化测向时,需重点考虑天线的极化匹配、微波设备的噪声系数等影响系统灵敏度的指标。
由上述分析可以看出,雷达与通信信号一体化侦察意义重大。从功能、工作频段、功率等几个方面分析来看,进行一体化设计也是可行的。雷达与通信信号一体化侦察测向系统结构图如图1所示。
从图1可以看出,一体化测向系统的多数硬件是通用资源,要完成雷达与通信信号一体化测向,重点是完成天线阵列、接收前端的共用设计。
2 天线阵列一体化设计
干涉仪测向有着测向精度高、工作频段宽、响应时间快、设备量小等诸多优点,因此在机载电子侦察设备中大多数采用干涉仪测向体制[5-6]。本文的雷达与通信信号一体化测向技术体制也采用干涉仪。干涉仪测向的工作原理图如图2所示。

图2 干涉仪测向工作原理图
在图2中,若某一辐射源平面波信号从与天线视轴夹角为θ方向辐射到天线单元上,它到达天线A、B的相位差为:
(1)
可得入射波的方向为:
(2)
测向误差为:
(3)
从式(3)可以看出,基线越长,测向精度越高。
最大无模糊视角为:
(4)
从式(4)可以看出,基线越长,无模糊视角越小。
从上面的分析可以看出,测向精度和无模糊视角是一对矛盾。传统的多基线干涉仪、短基线解模糊、长基线提升测向精度在一定条件下解决了这一对矛盾;但是对于电子侦察设备这样的宽频段测向系统,在高频段要解模糊,要求短基线的尺寸比天线单元的直径小,这在物理上是不可实现的[7-8]。为了克服这一问题,本文中采用虚拟多基线解模糊来平衡测向精度和无模糊视角这对矛盾。虚拟基线的原理是:通过多组实基线的相位作差获取一个最短基线的相位差,此时多组实基线的差值就是最短基线值,然后利用最短基线逐次解模糊,最终通过最长基线获取信号的波达方向,其原理如图3所示。

图3 虚拟基线原理图
在图3中,系统的无模糊视角不再由最短实基线d2决定,变成由虚拟基线d1确定,此时的无模糊区域变为:
(5)
从式(5)可以看出,无模糊区域得到了明显扩大。
在工程实际中,天线互耦、基线安装误差、通道间相位不一致性等诸多因素都会影响虚拟基线解模糊;因此,虚拟基线在实际运用中,也需要给各个环节留有足够的余量,确保虚拟基线能够正常工作。
在测向精度要求一定、工作频段范围已知、相位误差已设定的情况下,由公式(3)便可以确定出最长基线d6应满足的公式如下:
(6)
由公式(4)可以确定出最短基线尺寸应该满足:
(7)
逐级解模糊相邻两级的基线应满足如下关系:
(8)
依据式(8),通过逐级迭代,获取各级基线长度。
在0.38~2 GHz频段,空域范围:法线两侧±45°设计了雷达与通信信息共用测向阵列,其测向误差仿真如图4所示。天线单元兼顾了通信侦察对垂直极化的高增益需求,采用高增益圆极化天线单元,其模型如图5所示。
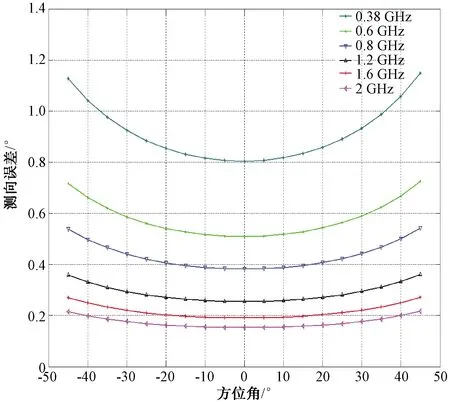
图4 干涉仪测向误差曲线
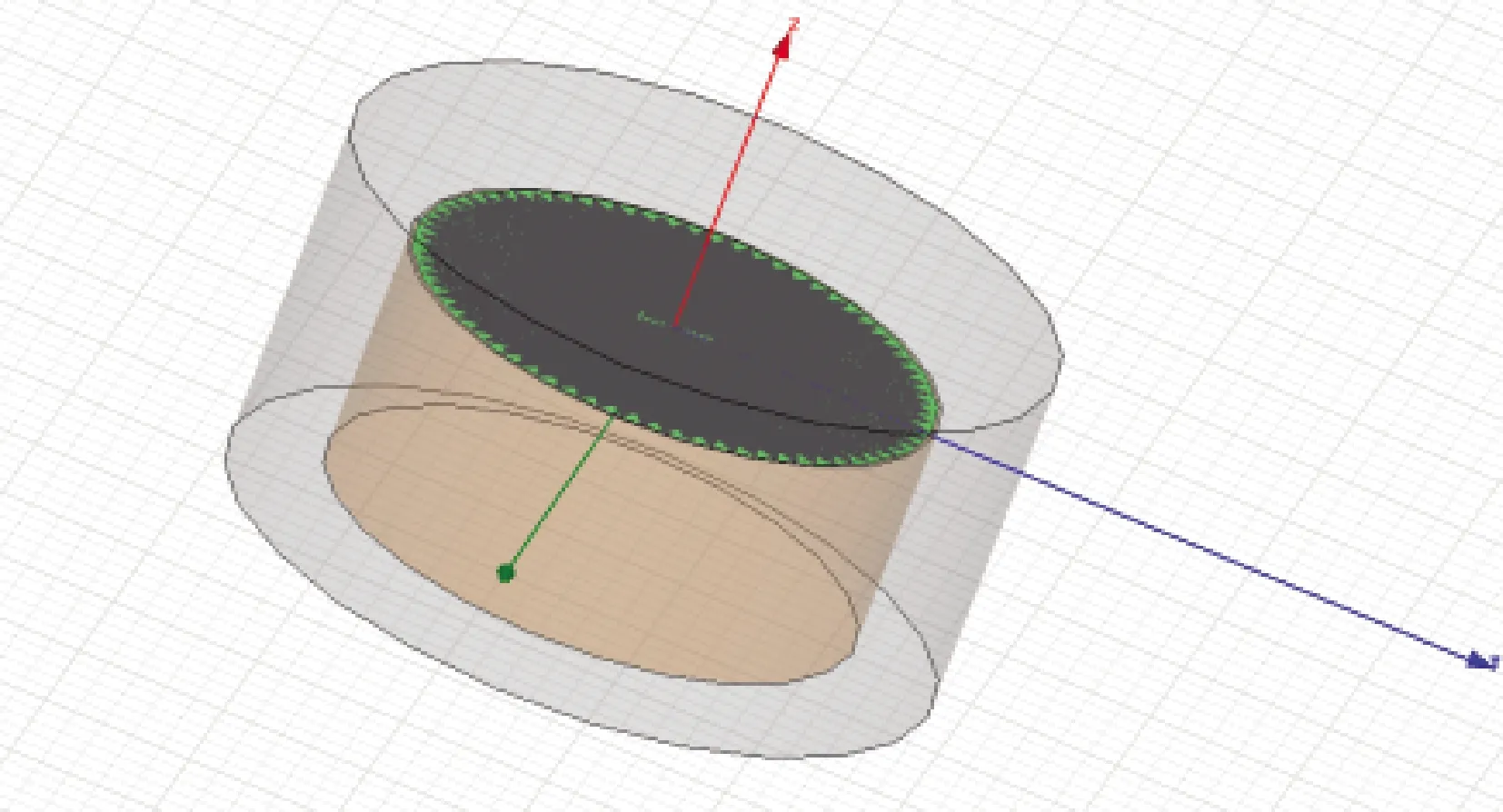
图5 天线单元模型图
将图4中的仿真数据代入下式:
(9)
计算可得干涉仪在边界点的测向精度如下:
σr.m.s≈0.61°
3 接收前端一体化设计
接收机灵敏度能够考核侦察系统接收小信号的能力,主要由接收机的噪声系数、基带单元解调对中频信号的信噪比需求、解调信号的带宽三者共同决定,其计算公式为:
Smin=-114+10lgB+10lgF
(10)
从式(10)可以看出,系统对小信号接收能力的恶化主要是因为信噪比的恶化,在接收信号大小一定、带宽一定的前提条件下,信噪比主要受加性白噪声的影响,它反映了接收机的噪声系数。相位噪声也会影响接收信号的质量,但相对于加性白噪声而言,微乎其微。系统噪声系数F计算如下:
(11)
式中:Gi为第i级的放大系数,无单位(倍数值);Fi为第i级的噪声系数,无单位(倍数值)。
从公式(11)可以看出,噪声系数主要取决于第1级系统的噪声系数,因此系统的噪声系数主要取决于接收前端内的选通开关、放大器、滤波器等组件及元器件的参数。
接收前端主要完成信号的通道选择、放大、功分、滤波、增益控制、均衡、故障检测等功能。通信侦察射频通道的仿真分析见图6。雷达侦察射频通道的仿真分析见图7。

图7 雷侦通道仿真
当通信信号带宽为10 MHz时,由图6的仿真结果可以计算出接收机灵敏度为-96.8 dBm。
当雷达信号带宽为400 MHz时,由图7的仿真结果可以计算出接收机灵敏度为-73 dBm。
通过上述分析,一体化接收前端设计指标完全可以满足对多数侦察目标的侦察。
4 测试结果
为了验证一体化测向系统的测向能力,在微波暗室对其性能进行了测试。
首先对L频段内-45°~+45°方向取235个采样点进行测试,测试结果误差曲线如图8所示。
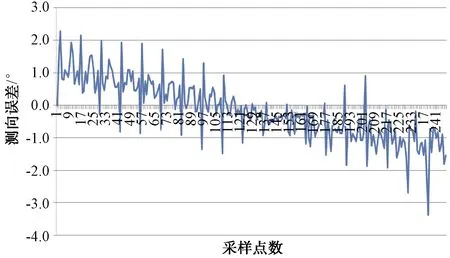
图8 雷达信号方位测试误差曲线
对测试数据进行统计分析,L频段雷达信号测向精度为0.89°(均方根误差)。
而后对通信信号测向性能进行测试,以2 000 MHz、正交相移键控(QPSK)调制的常规通信信号作为被侦察信号,在-45°~+45°方向内对该信号进行了测试,测试误差曲线如图9所示。
对测试数据进行统计分析,测向精度为0.58°(均方根误差)。
综合上述分析,天线阵列和接收前端完全可行,解模糊算法准确有效,系统能够准确地完成雷达信号和通信信号测向。

图9 通信信号方位测试误差曲线
5 结束语
对雷达信号与通信信号一体化测向进行了需求分析,从功能、技术体制、工作频段等几个方面分析了一体化设计的可行性,并给出一体化测向系统的总体设计框图。重点介绍了测向所采用的技术体制和天线单元布设所采用的虚拟基线设计方法,并进行了仿真分析。对共用接收前端所应注意的技术细节进行分析和仿真,最后通过暗室测试,对测向系统的性能进行了测试,测试结果表明,无论雷达信号还是通信信号的测向精度均优于1°(均方根误差)。
